You might also like
- PLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.From EverandPLC: Programmable Logic Controller – Arktika.: EXPERIMENTAL PRODUCT BASED ON CPLD.No ratings yet
- Quadrics Interconnection NetworkDocument24 pagesQuadrics Interconnection Networkapi-3827000100% (1)
- 3D Multiprocessor With 3D Noc Architecture Based On Tezzaron TechnologyDocument5 pages3D Multiprocessor With 3D Noc Architecture Based On Tezzaron TechnologyMos RemNo ratings yet
- S 8 Mod 1Document33 pagesS 8 Mod 1sheenaneesNo ratings yet
- DMS PDFDocument5 pagesDMS PDFJc LeonNo ratings yet
- Slide02 Parallel ComputersDocument44 pagesSlide02 Parallel Computersอภิเษก หงษ์วิทยากรNo ratings yet
- Lecture 4 Network Topologies For Parallel ArchitectureDocument34 pagesLecture 4 Network Topologies For Parallel Architecturenimranoor137No ratings yet
- BIL406 Chapter 2 Classifications of Parallel SystemsDocument67 pagesBIL406 Chapter 2 Classifications of Parallel SystemsMustafa SalihiNo ratings yet
- Lecture-27 interconnection networks+Chapter-5 slides-Version-2Document70 pagesLecture-27 interconnection networks+Chapter-5 slides-Version-2Abdul BariiNo ratings yet
- MIMD Computers: An OverviewDocument133 pagesMIMD Computers: An OverviewVimmi GoluNo ratings yet
- Parallel Computing Platforms and Memory PerformanceDocument43 pagesParallel Computing Platforms and Memory PerformanceaskbilladdmicrosoftNo ratings yet
- Implementing Parallel Processing in Rugged Embeddable EnvironmentDocument6 pagesImplementing Parallel Processing in Rugged Embeddable EnvironmentMeharban SinghNo ratings yet
- Cs501 Finalterm Paper 31 July 2013: All Mcqs From My Paper (New + Old)Document7 pagesCs501 Finalterm Paper 31 July 2013: All Mcqs From My Paper (New + Old)Faisal Abbas BastamiNo ratings yet
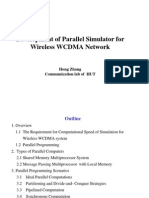
- Development of Parallel Simulator For Wireless WCDMA NetworkDocument23 pagesDevelopment of Parallel Simulator For Wireless WCDMA Networkegarciac77No ratings yet
- Railway Track Security SystmDocument28 pagesRailway Track Security SystmNikhil Hosur0% (1)
- Multistage Interconnection Network For Mpsoc: Performances Study and Prototyping On FpgaDocument6 pagesMultistage Interconnection Network For Mpsoc: Performances Study and Prototyping On Fpgagk_gbuNo ratings yet
- M1 Questions and AnswersDocument18 pagesM1 Questions and Answerslearn moreNo ratings yet
- Unit Iv Hardware Accelerates & NetworksDocument59 pagesUnit Iv Hardware Accelerates & NetworksManikandan AnnamalaiNo ratings yet
- CSE3057Y Parallel Platforms and Communication ModelsDocument38 pagesCSE3057Y Parallel Platforms and Communication ModelssplokbovNo ratings yet
- Base Band Modem Hardware Design: P. Antognoni, E. Sereni, S. Cacopardi, S. Carlini, M. ScafiDocument5 pagesBase Band Modem Hardware Design: P. Antognoni, E. Sereni, S. Cacopardi, S. Carlini, M. Scafikokome35No ratings yet
- Iskraemeco - Data Sheet P2LPC-Koncentrator AngDocument4 pagesIskraemeco - Data Sheet P2LPC-Koncentrator AngSuttisak SuriyachanhomNo ratings yet
- Multi ThreadingDocument168 pagesMulti ThreadingPrashanth RajendranNo ratings yet
- Modbus CommunicationDocument24 pagesModbus CommunicationMonicaNo ratings yet
- Process Multiple Signals with ADSP-21csp01 DSPDocument6 pagesProcess Multiple Signals with ADSP-21csp01 DSPIgnite ThrissurNo ratings yet
- IAT-IV Question Paper With Solution of 18EC741 Internet of Things and Wireless Sensor Networks Feb-2022-Dr. Eisha Akanksha, Prof. RichaDocument9 pagesIAT-IV Question Paper With Solution of 18EC741 Internet of Things and Wireless Sensor Networks Feb-2022-Dr. Eisha Akanksha, Prof. RichaSampNo ratings yet
- Submitted byDocument21 pagesSubmitted byAkshat AnandNo ratings yet
- Multiprocessor Systems Organization and Interconnection NetworksDocument24 pagesMultiprocessor Systems Organization and Interconnection NetworksviewpawanNo ratings yet
- Industrial Control Lecture Notes on Communication and NetworkingDocument27 pagesIndustrial Control Lecture Notes on Communication and Networking287 JatinNo ratings yet
- Secure Data CommunicationDocument11 pagesSecure Data CommunicationNeela ChennurNo ratings yet
- DSP-Lab REC-553Document66 pagesDSP-Lab REC-553PraveenNo ratings yet
- Downloadfile 2Document18 pagesDownloadfile 2Benjhon S. ElarcosaNo ratings yet
- Unit I IntroductionDocument54 pagesUnit I IntroductionMerbin JoseNo ratings yet
- 1993 Transputer FaqDocument15 pages1993 Transputer FaqrobbyyuNo ratings yet
- DSP Based Electrical Lab: Gokaraju Rangaraju Institute of Engineering & Technology (Autonomous)Document77 pagesDSP Based Electrical Lab: Gokaraju Rangaraju Institute of Engineering & Technology (Autonomous)P Praveen KumarNo ratings yet
- PDSP ArchitectureDocument95 pagesPDSP ArchitecturekrajasekarantutiNo ratings yet
- Coa CT 1 QBDocument43 pagesCoa CT 1 QBNilesh bibhutiNo ratings yet
- Network Protocols and Serial CommunicationDocument16 pagesNetwork Protocols and Serial CommunicationDileep ChakravarthiNo ratings yet
- Bharat Sanchar Nigam Limited: Ideal Institute of Technology, GhaziabadDocument16 pagesBharat Sanchar Nigam Limited: Ideal Institute of Technology, GhaziabadyrikkiNo ratings yet
- RTS Module 2 Part A NotesDocument11 pagesRTS Module 2 Part A NotesVignesh H VNo ratings yet
- C DotDocument5 pagesC DotAshish ToppoNo ratings yet
- Networking for Embedded Systems: OSI Model, I2C, EthernetDocument31 pagesNetworking for Embedded Systems: OSI Model, I2C, Ethernetneelakandan venkatramanNo ratings yet
- Multiprocessor Architectures and ProgrammingDocument89 pagesMultiprocessor Architectures and ProgrammingKULDEEP NARAYAN MINJNo ratings yet
- Basic concepts of computer networksDocument51 pagesBasic concepts of computer networksNATION OF LOVENo ratings yet
- Parallel ComputingDocument32 pagesParallel ComputingKhushal BisaniNo ratings yet
- Chapter 1 (CCNA1 - Module 1) : Introduction To NetworkingDocument10 pagesChapter 1 (CCNA1 - Module 1) : Introduction To NetworkingDjoanna Marie Tee VasquezNo ratings yet
- SIMD ArchitectureDocument16 pagesSIMD Architecturebinzidd007100% (1)
- EC09 505 MICROPROCESSORS AND MICROCONTROLLERSDocument40 pagesEC09 505 MICROPROCESSORS AND MICROCONTROLLERSlekhapankajNo ratings yet
- TaxonomiesDocument15 pagesTaxonomiesBoris DJIONGONo ratings yet
- Êå Mšü Mæüïç-Mæüìœý Ùçü$Të$, C Yìþ-Äæý$ Œþ Íßýçütè Òü Çùìœý, Õü Ü Òüo Œþþ Sñýçã - É-ËiDocument12 pagesÊå Mšü Mæüïç-Mæüìœý Ùçü$Të$, C Yìþ-Äæý$ Œþ Íßýçütè Òü Çùìœý, Õü Ü Òüo Œþþ Sñýçã - É-ËiSai kishoreNo ratings yet
- Week 1 - Introduction to 8085Document27 pagesWeek 1 - Introduction to 8085Nur AimanNo ratings yet
- Study of Architecture of DSP TMS320C6748Document9 pagesStudy of Architecture of DSP TMS320C6748Varssha BNo ratings yet
- Lecture 1Document24 pagesLecture 1loverboy_86No ratings yet
- 26-27 SIMD ArchitectureDocument33 pages26-27 SIMD Architecturefanna786No ratings yet
- PC To PC Optical Fibre CommunicationDocument7 pagesPC To PC Optical Fibre CommunicationPolumuri LovakumarNo ratings yet
- CS 55 - Local Area NetworksDocument181 pagesCS 55 - Local Area NetworksJun Ramos YoursNo ratings yet
- Computer Networks Lab ManualDocument61 pagesComputer Networks Lab Manualjenisha100% (2)
- DSP LabmanualDocument82 pagesDSP LabmanualHemanth SharmaNo ratings yet
- Can Be Characterized Based On: MicroprocessorsDocument4 pagesCan Be Characterized Based On: MicroprocessorsMahmoud ElmahdyNo ratings yet
- Class: T.E. E &TC Subject: DSP Expt. No.: Date: Title: Implementation of Convolution Using DSP Processor ObjectiveDocument9 pagesClass: T.E. E &TC Subject: DSP Expt. No.: Date: Title: Implementation of Convolution Using DSP Processor ObjectiveMahadevNo ratings yet
- Why switches are generally preferred to bridgesDocument6 pagesWhy switches are generally preferred to bridgesRavi KumarNo ratings yet
- Chapter1 - CPUDocument24 pagesChapter1 - CPUtrupti.kodinariya9810No ratings yet
- CS501 Lecture Handout on Computer ArchitectureDocument12 pagesCS501 Lecture Handout on Computer ArchitectureSaira GillaniNo ratings yet
- Feleke Register Transfer Note Part 1Document15 pagesFeleke Register Transfer Note Part 1TiruNo ratings yet
- Fundamental SolveDocument14 pagesFundamental Solveruntimeterror Line404No ratings yet
- Practical Design Patterns For Java DevelopersDocument266 pagesPractical Design Patterns For Java DeveloperstodevgNo ratings yet
- Module 1 Integrative Programming 2Document15 pagesModule 1 Integrative Programming 2Randy TabaogNo ratings yet
- CSE211 MCQ'sDocument17 pagesCSE211 MCQ'sYash Gupta MauryaNo ratings yet
- Object Oriented Prog With JAVADocument115 pagesObject Oriented Prog With JAVAChirag BhatiNo ratings yet
- CS1352 May07Document19 pagesCS1352 May07sridharanc23No ratings yet
- T State CalculationDocument2 pagesT State Calculationmritunjay bihari singhNo ratings yet
- Intro C ProgrammingDocument29 pagesIntro C Programmingu2303083No ratings yet
- Computer Architecture Pipeline HazardsDocument15 pagesComputer Architecture Pipeline HazardsElisée Ndjabu100% (1)
- Unit 3 Computer Software: StructureDocument12 pagesUnit 3 Computer Software: StructureShamsNo ratings yet
- Concepts in Programming LanguagesDocument30 pagesConcepts in Programming Languagesvipa2008No ratings yet
- Cpu Emulator PDFDocument37 pagesCpu Emulator PDFAndrés Guarín CorreaNo ratings yet
- LuajitDocument142 pagesLuajitAlazar Gebremedhin100% (1)
- 8086 MicroprocessorDocument37 pages8086 MicroprocessorMahesh krishNo ratings yet
- Module1 Vtu Python NotesDocument114 pagesModule1 Vtu Python Notesrakshitaj joshiNo ratings yet
- Computer Architecture and OrganizationDocument61 pagesComputer Architecture and OrganizationPoornima EgNo ratings yet
- Computer LanguagesDocument7 pagesComputer LanguagesPoonam Mahesh PurohitNo ratings yet
- CS 404 Introduction To Compiler Design: Lecture 12 + 13 Ahmed EzzatDocument25 pagesCS 404 Introduction To Compiler Design: Lecture 12 + 13 Ahmed Ezzatmaverick_33100% (1)
- pdp1 Lisp ImplementationDocument46 pagespdp1 Lisp ImplementationpepebyluisNo ratings yet
- Learn Computer Programming with QBASICDocument8 pagesLearn Computer Programming with QBASICAnonymous H3kGwRFiENo ratings yet
- CENG 223 ClassNotesChap01Document21 pagesCENG 223 ClassNotesChap01yasmin karaNo ratings yet
- AmigaAsmTutorial 1Document174 pagesAmigaAsmTutorial 1Milan ZaninovićNo ratings yet
- School of Science and EngineeringDocument2 pagesSchool of Science and EngineeringIrene SultanaNo ratings yet
- Systems Programming by Donovan (1-108) PDFDocument108 pagesSystems Programming by Donovan (1-108) PDFMuskan SoniNo ratings yet
- Machine LanguageDocument15 pagesMachine LanguageamitkumariiitianNo ratings yet
- Unit 5 NotesDocument14 pagesUnit 5 Notesesasc.swayamNo ratings yet
- Introduction To 8051 ProgrammingDocument24 pagesIntroduction To 8051 Programmingveeramaniks408No ratings yet
- Computer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityFrom EverandComputer Systems and Networking Guide: A Complete Guide to the Basic Concepts in Computer Systems, Networking, IP Subnetting and Network SecurityRating: 4.5 out of 5 stars4.5/5 (13)
- Microsoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsFrom EverandMicrosoft Azure Infrastructure Services for Architects: Designing Cloud SolutionsNo ratings yet
- ITIL 4: Digital and IT strategy: Reference and study guideFrom EverandITIL 4: Digital and IT strategy: Reference and study guideRating: 5 out of 5 stars5/5 (1)
- Set Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNFrom EverandSet Up Your Own IPsec VPN, OpenVPN and WireGuard Server: Build Your Own VPNRating: 5 out of 5 stars5/5 (1)
- FTTx Networks: Technology Implementation and OperationFrom EverandFTTx Networks: Technology Implementation and OperationRating: 5 out of 5 stars5/5 (1)
- AWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamFrom EverandAWS Certified Cloud Practitioner Study Guide: CLF-C01 ExamRating: 5 out of 5 stars5/5 (1)
- Evaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsFrom EverandEvaluation of Some Websites that Offer Virtual Phone Numbers for SMS Reception and Websites to Obtain Virtual Debit/Credit Cards for Online Accounts VerificationsRating: 5 out of 5 stars5/5 (1)
- ITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationFrom EverandITIL® 4 Create, Deliver and Support (CDS): Your companion to the ITIL 4 Managing Professional CDS certificationRating: 5 out of 5 stars5/5 (2)
- The CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersFrom EverandThe CompTIA Network+ Computing Technology Industry Association Certification N10-008 Study Guide: Hi-Tech Edition: Proven Methods to Pass the Exam with Confidence - Practice Test with AnswersNo ratings yet
- AWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamFrom EverandAWS Certified Solutions Architect Study Guide: Associate SAA-C02 ExamNo ratings yet
- Concise Guide to OTN optical transport networksFrom EverandConcise Guide to OTN optical transport networksRating: 4 out of 5 stars4/5 (2)
- Computer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)From EverandComputer Networking: The Complete Beginner's Guide to Learning the Basics of Network Security, Computer Architecture, Wireless Technology and Communications Systems (Including Cisco, CCENT, and CCNA)Rating: 4 out of 5 stars4/5 (4)
- The Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireFrom EverandThe Ultimate Kali Linux Book - Second Edition: Perform advanced penetration testing using Nmap, Metasploit, Aircrack-ng, and EmpireNo ratings yet
- Software-Defined Networks: A Systems ApproachFrom EverandSoftware-Defined Networks: A Systems ApproachRating: 5 out of 5 stars5/5 (1)
- CCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationFrom EverandCCNA: 3 in 1- Beginner's Guide+ Tips on Taking the Exam+ Simple and Effective Strategies to Learn About CCNA (Cisco Certified Network Associate) Routing And Switching CertificationNo ratings yet
- The Compete Ccna 200-301 Study Guide: Network Engineering EditionFrom EverandThe Compete Ccna 200-301 Study Guide: Network Engineering EditionRating: 5 out of 5 stars5/5 (4)
- Advanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeFrom EverandAdvanced Antenna Systems for 5G Network Deployments: Bridging the Gap Between Theory and PracticeRating: 5 out of 5 stars5/5 (1)
- Amazon Web Services (AWS) Interview Questions and AnswersFrom EverandAmazon Web Services (AWS) Interview Questions and AnswersRating: 4.5 out of 5 stars4.5/5 (3)
- Hacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.From EverandHacking Network Protocols: Complete Guide about Hacking, Scripting and Security of Computer Systems and Networks.Rating: 5 out of 5 stars5/5 (2)