You might also like
- Power System Stability Improvement Using FACTS DevicesDocument7 pagesPower System Stability Improvement Using FACTS DevicesEr. Amar KumarNo ratings yet
- A Literature Review On The Unified Power Flow Controller UPFCDocument7 pagesA Literature Review On The Unified Power Flow Controller UPFCAlsammak2009No ratings yet
- FACTS Devices Improve Power System StabilityDocument24 pagesFACTS Devices Improve Power System StabilityJayanth Kumar M HNo ratings yet
- Methods for Increasing the Quality and Reliability of Power System Using FACTS DevicesFrom EverandMethods for Increasing the Quality and Reliability of Power System Using FACTS DevicesNo ratings yet
- Enhancement of Power Quality in Grid Connected Wind Energy System Using STATCOMDocument9 pagesEnhancement of Power Quality in Grid Connected Wind Energy System Using STATCOMShaik Muhammad ImranNo ratings yet
- Transient Stability Improvement of SMIB With Unified Power Flow ControllerDocument78 pagesTransient Stability Improvement of SMIB With Unified Power Flow ControllerRagesh OdungattuNo ratings yet
- A Comparison of The Voltage Enhancement and Loss Reduction Capabilities of STATCOM and SSSC FACTS ControllersDocument10 pagesA Comparison of The Voltage Enhancement and Loss Reduction Capabilities of STATCOM and SSSC FACTS ControllersAJER JOURNALNo ratings yet
- 06 Chapter1Document23 pages06 Chapter1Ravishankar KankaleNo ratings yet
- Fin Irjmets1651552661Document20 pagesFin Irjmets1651552661Jonathan ManzakiNo ratings yet
- STATCOM Project Report SummaryDocument37 pagesSTATCOM Project Report SummaryVamsi SwapnaNo ratings yet
- Voltage Stability Improvement - IsuraDocument12 pagesVoltage Stability Improvement - IsuraSandun LakminaNo ratings yet
- 1 PDFDocument4 pages1 PDFMohan KrishnaNo ratings yet
- Raviraju Published PaperDocument10 pagesRaviraju Published Paperraviraju2498No ratings yet
- Reactive Power Compensation Technologies for Reliable Power SystemsDocument15 pagesReactive Power Compensation Technologies for Reliable Power SystemspraneethNo ratings yet
- Q StatcomDocument18 pagesQ StatcomHesham A. HazaymehNo ratings yet
- Voltage Dip Mitigation in Distribution System by Using D-StatcomDocument12 pagesVoltage Dip Mitigation in Distribution System by Using D-Statcomtaner56No ratings yet
- Ibraahim Hassanee UmarDocument22 pagesIbraahim Hassanee UmarJemal BeyanNo ratings yet
- Power Quality Improvement by Using DSTATCOMDocument12 pagesPower Quality Improvement by Using DSTATCOMsirageldeenNo ratings yet
- Design and Simulation of Fuzzy Controlled SVC for Long Transmission LinesDocument63 pagesDesign and Simulation of Fuzzy Controlled SVC for Long Transmission LinesTadele Amogne100% (3)
- 220KV STATCOM Study - Wathar MaharashtraDocument12 pages220KV STATCOM Study - Wathar MaharashtraSaikrishnaNo ratings yet
- Voltage Stability Enhancement in Power System Using STATCOM Based On Specific Coefficient Algorithm (SCA)Document7 pagesVoltage Stability Enhancement in Power System Using STATCOM Based On Specific Coefficient Algorithm (SCA)ElafanNo ratings yet
- Effectiveness of FACTS Devices For Power System Stability EnhancementDocument4 pagesEffectiveness of FACTS Devices For Power System Stability EnhancementMehul JainNo ratings yet
- Transient Stability Performance Analysis of Power System Using Facts DevicesDocument7 pagesTransient Stability Performance Analysis of Power System Using Facts Devicesrasim_m1146No ratings yet
- Improve Voltage Stability Using TCSCDocument66 pagesImprove Voltage Stability Using TCSCsenthil_k23No ratings yet
- Impact of Static Var Compensator (SVC) Installation in Power System StabilityDocument7 pagesImpact of Static Var Compensator (SVC) Installation in Power System Stabilityboody bazaraaNo ratings yet
- Facts Devices ComparisonDocument5 pagesFacts Devices ComparisonAmit Pratap SinghNo ratings yet
- A Statcom Control Scheme DocumentationDocument65 pagesA Statcom Control Scheme DocumentationSantosh SuryataleNo ratings yet
- Dynamic Var Planing Using TSDocument9 pagesDynamic Var Planing Using TSTarik AhasanNo ratings yet
- Thyristor Controlled Series CapacitorDocument9 pagesThyristor Controlled Series CapacitorVamshiKrishnaNo ratings yet
- Transient Stability of Power System by Static VAR Compensator (SVC) and Power System Stabilizers (PSS) Using Matlab/SimulinkDocument5 pagesTransient Stability of Power System by Static VAR Compensator (SVC) and Power System Stabilizers (PSS) Using Matlab/SimulinkArunima SahaNo ratings yet
- Enhancement of Voltage Profile For IEEE-14 Bus System by Using STATIC-VAR Compensation (SVC) When Subjected To Various Changes in LoadDocument7 pagesEnhancement of Voltage Profile For IEEE-14 Bus System by Using STATIC-VAR Compensation (SVC) When Subjected To Various Changes in LoadbaghdadnethrNo ratings yet
- Power System Stability Improvement Using Facts Devices: S.V College of Engineering, Dept. of EEEDocument21 pagesPower System Stability Improvement Using Facts Devices: S.V College of Engineering, Dept. of EEEbhuvanaNo ratings yet
- 1.1.3 Flexible AC Transmission System (FACTS)Document14 pages1.1.3 Flexible AC Transmission System (FACTS)Richardson PaduaNo ratings yet
- POWER QUALITY IMPROVEMENT USING STATCOMDocument6 pagesPOWER QUALITY IMPROVEMENT USING STATCOMjoNo ratings yet
- Optimal Placement of STATCOM in Power SystemsDocument4 pagesOptimal Placement of STATCOM in Power SystemsWARSE JournalsNo ratings yet
- Power Electronics in Electric Utilities: Static Va R CompensatorsDocument12 pagesPower Electronics in Electric Utilities: Static Va R CompensatorssaeedjahdiNo ratings yet
- Technique For Voltage Control in Distribution SystemDocument4 pagesTechnique For Voltage Control in Distribution Systema_mohid17No ratings yet
- Voltage Control and Dynamic Performance of Power Transmission Using Static VAR CompensatorDocument11 pagesVoltage Control and Dynamic Performance of Power Transmission Using Static VAR CompensatormuhammadmusakhanNo ratings yet
- Flexible Ac Transmission by SVC: Main Project Interim ReportDocument22 pagesFlexible Ac Transmission by SVC: Main Project Interim ReportSafalsha BabuNo ratings yet
- Impact of Loads On Power Flow in Power Systems Using Powerapps and EtapDocument4 pagesImpact of Loads On Power Flow in Power Systems Using Powerapps and EtapAmirNo ratings yet
- 10 11648 J Sjee 20200804 11Document10 pages10 11648 J Sjee 20200804 11Apila NiangaNo ratings yet
- Optimal Placement of Static Var Compensators in Power SystemDocument7 pagesOptimal Placement of Static Var Compensators in Power SystemAbhyuday GhoshNo ratings yet
- TheoryDocument52 pagesTheoryVeera Hemavardhan Reddy YaparlaNo ratings yet
- Power Quality Improvement by Using STATCOM Control PDFDocument11 pagesPower Quality Improvement by Using STATCOM Control PDFيوسف خضر النسورNo ratings yet
- Chapter One 1.1 Background of The Study: Research Proposal On Power Quality Enhancement Using DSTATCOMDocument11 pagesChapter One 1.1 Background of The Study: Research Proposal On Power Quality Enhancement Using DSTATCOMHailu HailuNo ratings yet
- An Innovative SSSC Device For Power Quality EnhancementDocument6 pagesAn Innovative SSSC Device For Power Quality EnhancementInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Power System Stability Enhancement by Using Static Synchronous Series CompensatorDocument60 pagesPower System Stability Enhancement by Using Static Synchronous Series CompensatorSai Bhargav Veerabathini100% (7)
- Power Quality Detection Using FACTSDocument4 pagesPower Quality Detection Using FACTSSaravanan T YNo ratings yet
- Performance Analysis of SSFC For Power Quality Improvement in Wind Smart GridDocument4 pagesPerformance Analysis of SSFC For Power Quality Improvement in Wind Smart GriderpublicationNo ratings yet
- POWER DEVICES IMPLEMENTATION & ANALYSIS ON ETAP by Abhilash ReddyDocument26 pagesPOWER DEVICES IMPLEMENTATION & ANALYSIS ON ETAP by Abhilash ReddyAbhilash ReddyNo ratings yet
- Voltage collapse causes and mitigation techniquesDocument3 pagesVoltage collapse causes and mitigation techniquesNik Mohd Fazli HasifieNo ratings yet
- Review Paper On FACTS DevicesDocument18 pagesReview Paper On FACTS DevicesBakhtiar Khan100% (1)
- Voltage Support Control Strategies For Static Synchronous Compensators Under Unbalanced Voltage SagsDocument4 pagesVoltage Support Control Strategies For Static Synchronous Compensators Under Unbalanced Voltage SagschikatisivashankarNo ratings yet
- 1advanced Controller Design For D-FACTS Device in Grid Connected PV System - EditedDocument6 pages1advanced Controller Design For D-FACTS Device in Grid Connected PV System - EditedBrian BlazerNo ratings yet
- Irjet V5i2180 PDFDocument6 pagesIrjet V5i2180 PDFrudra pNo ratings yet
- Applications of Facts Controllers in Power Systems For Enhance The Power System Stability: A State-Of-The-ArtDocument30 pagesApplications of Facts Controllers in Power Systems For Enhance The Power System Stability: A State-Of-The-ArtMehul JainNo ratings yet
- AN IMPROVED HYBRID STATCOM FOR REACTIVE POWER COMPENSATION AND LOW DC LINK VOLTAGEDocument10 pagesAN IMPROVED HYBRID STATCOM FOR REACTIVE POWER COMPENSATION AND LOW DC LINK VOLTAGEbrindhia KrishNo ratings yet
- 154 904 2 PBDocument47 pages154 904 2 PBjagarov4954100% (1)
- Voltage Stability Improvement in KRG Network by Facts DevicesDocument16 pagesVoltage Stability Improvement in KRG Network by Facts DevicesTana AzeezNo ratings yet
- Important MCQ - Electronic Devices and CircuitsDocument8 pagesImportant MCQ - Electronic Devices and CircuitsarijitlgspNo ratings yet
- Design of Electrical MachinesDocument27 pagesDesign of Electrical MachinesAnaZanattaNo ratings yet
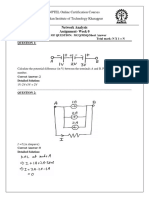
- NPTEL Online Certification Courses Indian Institute of Technology KharagpurDocument8 pagesNPTEL Online Certification Courses Indian Institute of Technology KharagpurABHISHEK GAUTAMNo ratings yet
- Compressor Motor Types and Start RelaysDocument7 pagesCompressor Motor Types and Start Relaysildiko1234No ratings yet
- Week 2: Dynamics: Figure 2. 1 Newton's Laws of Motion Describe The Motion of The Dolphin's Path. (Credit: Jin Jang)Document16 pagesWeek 2: Dynamics: Figure 2. 1 Newton's Laws of Motion Describe The Motion of The Dolphin's Path. (Credit: Jin Jang)anola prickNo ratings yet
- Code of Practice For Road Bridges: Standard Specifications andDocument55 pagesCode of Practice For Road Bridges: Standard Specifications andshravyaNo ratings yet
- 5 - The Implementation of Velocity-Based TrainingDocument14 pages5 - The Implementation of Velocity-Based Trainingcarlos andresNo ratings yet
- 4PH1 2PR Que 20201124Document20 pages4PH1 2PR Que 20201124Simam Rista50% (2)
- Inverter ProjectDocument15 pagesInverter Projectchiranjeet chandraNo ratings yet
- Digital Clamp Meter KM 999Document1 pageDigital Clamp Meter KM 999industrialindiaNo ratings yet
- TOPIC 1.1: Waves in One DimensionDocument20 pagesTOPIC 1.1: Waves in One DimensionWelfredo Jr YuNo ratings yet
- Calc Temp Load Capable of Cable-Neher-McGrathDocument13 pagesCalc Temp Load Capable of Cable-Neher-McGrathmcavy100% (1)
- E-STOP Relays, Safety Gate Monitors: PNOZ X3.10PDocument8 pagesE-STOP Relays, Safety Gate Monitors: PNOZ X3.10PRafael CarmoNo ratings yet
- Schaeffler Technical Pocket Guide PDFDocument716 pagesSchaeffler Technical Pocket Guide PDFStoica ValentinNo ratings yet
- Transformador de PulsoDocument22 pagesTransformador de PulsoFreddy de los SantosNo ratings yet
- Assignments /tutorial Sheets: ME - 102: Engineering MechanicsDocument12 pagesAssignments /tutorial Sheets: ME - 102: Engineering MechanicssubhashNo ratings yet
- 50a Service Manual PDFDocument15 pages50a Service Manual PDFalan scapeNo ratings yet
- Indiart !standard: Specification FOR Electric Table Type Fans and RegulatorsDocument29 pagesIndiart !standard: Specification FOR Electric Table Type Fans and RegulatorsHarish MauryaNo ratings yet
- Dm5218s Insulation TesterDocument16 pagesDm5218s Insulation TesterganeshNo ratings yet
- ABB Surge Arrester POLIM-C N - Data Sheet 1HC0075874 EN ADDocument8 pagesABB Surge Arrester POLIM-C N - Data Sheet 1HC0075874 EN ADA. SajadiNo ratings yet
- 9th PhysicsDocument69 pages9th Physicsmuhammad hamza faryadNo ratings yet
- 4 PhyDocument42 pages4 PhyRacoNo ratings yet
- DIRANA Application Guide - Measuring and Analyzing Power Transformers PDFDocument33 pagesDIRANA Application Guide - Measuring and Analyzing Power Transformers PDFMatthew Franklin AdedejiNo ratings yet
- Introduction, Abstract, Conclusion, ReferenceDocument4 pagesIntroduction, Abstract, Conclusion, ReferenceChiu Fong50% (2)
- Tesla Cosmic Ray Motor May Transmit Power Round Earth (John J. A. O'Neill)Document2 pagesTesla Cosmic Ray Motor May Transmit Power Round Earth (John J. A. O'Neill)THE NIKOLA TESLA INSTITUTENo ratings yet
- NTU engineering experiment manual explores force equilibriumDocument13 pagesNTU engineering experiment manual explores force equilibriumLim RufeiNo ratings yet
- Automatic Voltage RegulatorDocument5 pagesAutomatic Voltage Regulatorvirendkumar50% (2)
- 5TH Week EnergyDocument6 pages5TH Week EnergyMira VeranoNo ratings yet
- Calculus Based Physics 1 Pre Final ExamDocument9 pagesCalculus Based Physics 1 Pre Final Examneiljohn geraldezNo ratings yet
- Classroom Assignment 6 With AnswersDocument3 pagesClassroom Assignment 6 With AnswersBishoy EmileNo ratings yet