You might also like
- Cracking C Programming Interview: 500+ interview questions and explanations to sharpen your C concepts for a lucrative programming career (English Edition)From EverandCracking C Programming Interview: 500+ interview questions and explanations to sharpen your C concepts for a lucrative programming career (English Edition)No ratings yet
- PIC32 Microcontrollers and the Digilent Chipkit: Introductory to Advanced ProjectsFrom EverandPIC32 Microcontrollers and the Digilent Chipkit: Introductory to Advanced ProjectsRating: 5 out of 5 stars5/5 (1)
- Petazzoni Device Tree DummiesDocument45 pagesPetazzoni Device Tree DummiesNelson KigenNo ratings yet
- Hands-on TinyML: Harness the power of Machine Learning on the edge devices (English Edition)From EverandHands-on TinyML: Harness the power of Machine Learning on the edge devices (English Edition)Rating: 5 out of 5 stars5/5 (1)
- Application-Specific Integrated Circuit ASIC A Complete GuideFrom EverandApplication-Specific Integrated Circuit ASIC A Complete GuideNo ratings yet
- Arduino - SPIDocument4 pagesArduino - SPIMuhammad Fikri100% (1)
- MSP430 IntroductionDocument36 pagesMSP430 IntroductionSreekanth PagadapalliNo ratings yet
- Mastering Stm32 SampleDocument95 pagesMastering Stm32 Sampleivan braga100% (9)
- GPIO STM32 STMF4DiscoveryDocument14 pagesGPIO STM32 STMF4Discoverysboy888No ratings yet
- Avr LibDocument425 pagesAvr LibivoNo ratings yet
- Embedded SW Development With ECosDocument35 pagesEmbedded SW Development With ECosRakesh MenonNo ratings yet
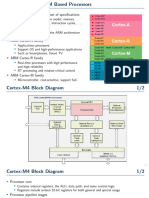
- ARM ProcessorsDocument16 pagesARM ProcessorsyayavaramNo ratings yet
- Porting GuideDocument4 pagesPorting Guideboot_sectorzNo ratings yet
- CH3 - STM32 SoftwareprogrammingDocument15 pagesCH3 - STM32 Softwareprogramminghouda bouzekriNo ratings yet
- AVR-GCC and The PROGMEM AttributeDocument10 pagesAVR-GCC and The PROGMEM AttributeleonttiNo ratings yet
- X86 ArchitetureDocument17 pagesX86 Architetureseety2No ratings yet
- Device Tree Made EasyDocument22 pagesDevice Tree Made Easym3y54mNo ratings yet
- STM 32Document4 pagesSTM 32ratheeshbr100% (1)
- Lecture-1 ARM Cortex M4-Based System PDFDocument36 pagesLecture-1 ARM Cortex M4-Based System PDFAnandNo ratings yet
- I2CDocument37 pagesI2CVeeresh Rg100% (3)
- Advanced View Pic Microcontroller Projects List - PIC MicrocontrollerDocument263 pagesAdvanced View Pic Microcontroller Projects List - PIC MicrocontrollerBilal Afzal100% (1)
- Freescale's S08 Ultra-Low-Power MCU With LCD DriverDocument6 pagesFreescale's S08 Ultra-Low-Power MCU With LCD DriverIonela100% (1)
- Zynq EPP Boot Camp Lab WorkbookDocument199 pagesZynq EPP Boot Camp Lab WorkbookEswaran SamyNo ratings yet
- Embedded C ProgrammingDocument49 pagesEmbedded C Programmingmukesh_jangra100% (1)
- PIC Vs AVRDocument5 pagesPIC Vs AVRManasa Ranjan100% (2)
- Carmine Noviello-Mastering STM32-Leanpub (2016)Document783 pagesCarmine Noviello-Mastering STM32-Leanpub (2016)Dũng TrầnNo ratings yet
- Embedded Systems Books Tools PackDocument18 pagesEmbedded Systems Books Tools PackNirmal KumarNo ratings yet
- Raspbian Emulation Using QEMUDocument19 pagesRaspbian Emulation Using QEMUMohammed Publications100% (1)
- Linux Kernel DriverDocument32 pagesLinux Kernel Driverscuser.pokeNo ratings yet
- Programming Microcontrollers in C 2EDocument470 pagesProgramming Microcontrollers in C 2Emiculurs100% (2)
- FreeRTOS Tutorial Book PIC32 Edition TOCDocument11 pagesFreeRTOS Tutorial Book PIC32 Edition TOCjejfqldskfhdqskjfhqd100% (2)
- Olimexino STM32Document19 pagesOlimexino STM32numero909No ratings yet
- Propeller Assembly Language PotatoheadDocument69 pagesPropeller Assembly Language PotatoheadEddie Kluss IIINo ratings yet
- Linux Device DriversDocument26 pagesLinux Device Driversjackel.intouch481100% (1)
- PIC Basic CourseDocument57 pagesPIC Basic Coursetermicas100% (3)
- PIC16F877 Timer Modules Tutorials - PIC Timer0 Tutorial PDFDocument3 pagesPIC16F877 Timer Modules Tutorials - PIC Timer0 Tutorial PDFvka_prince100% (1)
- Rbn-Ros2 2022Document22 pagesRbn-Ros2 2022abuNo ratings yet
- Contiki, Iot Os &: Cooja Network SimulatorDocument37 pagesContiki, Iot Os &: Cooja Network SimulatorNikita NegiNo ratings yet
- EES05 - MSP430 MicrocontrollerDocument128 pagesEES05 - MSP430 MicrocontrollerasdsdNo ratings yet
- HBridgeMotorControl With PICDocument11 pagesHBridgeMotorControl With PICcoceicr100% (3)
- STM32 Smart SchematicsDocument3 pagesSTM32 Smart Schematicschennai chn100% (2)
- Bitwise Operators in C PDFDocument26 pagesBitwise Operators in C PDFThota Tarun100% (1)
- Microchip MPLAB® X IDE User's GuideDocument226 pagesMicrochip MPLAB® X IDE User's GuideStuart CouttsNo ratings yet
- 8051Document39 pages8051Vaishali GajjarNo ratings yet
- Microsoft Windows Driver Development and Inf File ConstructiontDocument158 pagesMicrosoft Windows Driver Development and Inf File ConstructiontSalvatore BonaffinoNo ratings yet
- ARM CORTEX M4 Memory LayoutDocument11 pagesARM CORTEX M4 Memory LayoutGurram KishoreNo ratings yet
- Introduction To PIC Microcontroller: Lecturer: DR Abd Rahman Tamuri, DR Yaacob Mat DaudDocument54 pagesIntroduction To PIC Microcontroller: Lecturer: DR Abd Rahman Tamuri, DR Yaacob Mat DaudRaymond Esmeralda100% (1)
- Flex and BisonDocument21 pagesFlex and BisonMark Rudson100% (2)
- User Manual of STM32F1 HAL and Low-Layer DriversDocument1,166 pagesUser Manual of STM32F1 HAL and Low-Layer DriversismaellutzNo ratings yet
- BootloaderDocument2 pagesBootloaderChamath Kirinde100% (2)
- AVR Microcontroller: Prepared By: Eng. Ashraf DarwishDocument19 pagesAVR Microcontroller: Prepared By: Eng. Ashraf DarwishHectorLopez100% (2)
- XC8 Tutorial Ee3954 Fall12 13 C Part2Document13 pagesXC8 Tutorial Ee3954 Fall12 13 C Part2varuntejavarma100% (1)
- Ds180 7series OverviewDocument18 pagesDs180 7series OverviewRakesh KhannaNo ratings yet
- EN - DR-ID300CL V10 - 0 Product Inspection ProcedureDocument9 pagesEN - DR-ID300CL V10 - 0 Product Inspection ProcedureSalvador CajasNo ratings yet
- 27gl650f Leona2 Eng AuDocument36 pages27gl650f Leona2 Eng Ausiva prasadNo ratings yet
- Language TranslatorDocument15 pagesLanguage TranslatorJust Another humanNo ratings yet
- Spss and Softstat Part 1Document25 pagesSpss and Softstat Part 1kinhai_seeNo ratings yet
- Intel Confidential (Until Publication Date) : Pentium® Processor With MMX™ TechnologyDocument51 pagesIntel Confidential (Until Publication Date) : Pentium® Processor With MMX™ Technologyprashant_scribdNo ratings yet
- Output LogDocument71 pagesOutput LogYasser ArizaNo ratings yet
- TCS IT Wiz Quiz Book 2012Document56 pagesTCS IT Wiz Quiz Book 2012ShubhamPunjNo ratings yet
- Vess R2000-J2000 Series PM v2.2Document704 pagesVess R2000-J2000 Series PM v2.2power kacang1No ratings yet
- Crack Dept Measurement Using Arduino Project Report FullDocument39 pagesCrack Dept Measurement Using Arduino Project Report FullVasudevan RuthraprakashNo ratings yet
- Ap7202-Asic and FpgaDocument12 pagesAp7202-Asic and FpgaMOTHI.R MEC-AP/ECENo ratings yet
- Ass1 PDFDocument2 pagesAss1 PDFSachin GuptaNo ratings yet
- Dsa 0026528Document2 pagesDsa 002652820824ddNo ratings yet
- Emulex Boot For The Fiber Channel Protocol - User Guide R12.0Document79 pagesEmulex Boot For The Fiber Channel Protocol - User Guide R12.0Y.FNo ratings yet
- EN - Streamvault 16.1 Performing A Factory ResetDocument12 pagesEN - Streamvault 16.1 Performing A Factory ResetrodviljosNo ratings yet
- DP83848K National SemiconductorDocument72 pagesDP83848K National SemiconductorAmina Bralic ChupkaNo ratings yet
- BotDocument111 pagesBotjackvengeanceNo ratings yet
- Advanced MySQL Administration and ProgrammingDocument35 pagesAdvanced MySQL Administration and ProgrammingMustafa WaqarNo ratings yet
- 1X70 Platforms: Exceptional Performance in A 1U Appliance Platform Product SpecificationsDocument2 pages1X70 Platforms: Exceptional Performance in A 1U Appliance Platform Product Specificationsmanohar kumarNo ratings yet
- b97fd0e9-cf30-472b-b8ac-49ef5c7807ee.txtDocument365 pagesb97fd0e9-cf30-472b-b8ac-49ef5c7807ee.txtWiwin Nuryanti IINo ratings yet
- RH Training Courses in The Partner Training Portal 2022 02Document2 pagesRH Training Courses in The Partner Training Portal 2022 02Justice MapangaNo ratings yet
- Os Lab6Document12 pagesOs Lab6Arjun AgarwalNo ratings yet
- h8065 Ibm TSM Backup Data Domain WPDocument0 pagesh8065 Ibm TSM Backup Data Domain WPAbhishek PubbisettyNo ratings yet
- Instruction ManualDocument120 pagesInstruction Manualapi-19827677No ratings yet
- Centos 54 Cli UsDocument3 pagesCentos 54 Cli Usdionpp39No ratings yet
- PC Hardware & Networking Syllabus PDFDocument2 pagesPC Hardware & Networking Syllabus PDFHassan MohamedNo ratings yet
- Ok 5325 CLUSBDocument2 pagesOk 5325 CLUSBgroovey9040No ratings yet
- S4600 - 3.1.1 - Configuration GuideDocument431 pagesS4600 - 3.1.1 - Configuration GuideHadrian1No ratings yet
- Computer Networks: NameDocument1 pageComputer Networks: NameHafizPradanaGemilangNo ratings yet
- DX200 Operators Manual For Ladder Editor PDFDocument55 pagesDX200 Operators Manual For Ladder Editor PDFVictor Solis Brevis100% (1)