You might also like
- Censtar Pumps RS485 PDFDocument13 pagesCenstar Pumps RS485 PDFdenigunawan58No ratings yet
- Design II MDE 221 Mott CH 8 and CH 9 Spur GearsDocument42 pagesDesign II MDE 221 Mott CH 8 and CH 9 Spur GearsThieroy PelendaNo ratings yet
- Hypoid Gear CuttingDocument9 pagesHypoid Gear CuttingHano LourensNo ratings yet
- Page 1 of 21 Designing Parametric Bevel Gears With Catia V5Document21 pagesPage 1 of 21 Designing Parametric Bevel Gears With Catia V53pherNo ratings yet
- 10.1 - Calculation of Strength For Spur and Helical Gears - TechnicalData - KGSTOCKGEARS PDFDocument14 pages10.1 - Calculation of Strength For Spur and Helical Gears - TechnicalData - KGSTOCKGEARS PDFChetan NeheteNo ratings yet
- Comparison Between Different Commercial Gear Tooth Contact Analysis Software PackagesDocument16 pagesComparison Between Different Commercial Gear Tooth Contact Analysis Software PackagesAbhijeet DeshmukhNo ratings yet
- SKF Linear BushDocument60 pagesSKF Linear BushAwdhesh Singh Bhadoriya100% (1)
- Bearing DesignDocument58 pagesBearing DesignCaryann Gumban100% (1)
- The Basics of Gear TheoryDocument12 pagesThe Basics of Gear TheoryChandrasekaranNo ratings yet
- ME 308 Machine Elements Ii: 26.04.2012 Chapter 5 Spur Gears 1Document31 pagesME 308 Machine Elements Ii: 26.04.2012 Chapter 5 Spur Gears 1Nihat YildirimNo ratings yet
- Gear Box Design: Mech 420 Major ProjectDocument62 pagesGear Box Design: Mech 420 Major ProjectAtul DahiyaNo ratings yet
- What We Need To Know About Them. Type of Gears Terminologies or Nomenclatures Forces Transmitted Design of A Gear BoxDocument33 pagesWhat We Need To Know About Them. Type of Gears Terminologies or Nomenclatures Forces Transmitted Design of A Gear Boxfaith23dbagulNo ratings yet
- Introduction To GearsDocument28 pagesIntroduction To Gearssandeep_gaikwad2100% (4)
- Problems s8Document4 pagesProblems s8zangue billy jamesNo ratings yet
- Basic of Hobbing.Document71 pagesBasic of Hobbing.Himanshu MishraNo ratings yet
- AGMADocument7 pagesAGMADipakNo ratings yet
- Spur Gears: Are Used in Transmitting Torque Between Parallel ShaftsDocument31 pagesSpur Gears: Are Used in Transmitting Torque Between Parallel ShaftsDipakNo ratings yet
- Bevel Gear: Bevel Gears Are Gears Where The Axes of The Two Shafts Intersect and The ToothDocument3 pagesBevel Gear: Bevel Gears Are Gears Where The Axes of The Two Shafts Intersect and The ToothVetri VelNo ratings yet
- Modern Shaft CalculationDocument8 pagesModern Shaft CalculationNajaf HussainNo ratings yet
- Externally Pressurized Fluid Film Bearings (Hydrostatic Bearing)Document27 pagesExternally Pressurized Fluid Film Bearings (Hydrostatic Bearing)Daniel Philip LeuschnerNo ratings yet
- Hob ResharpeningDocument10 pagesHob ResharpeningRaul PerezNo ratings yet
- Power Skiving PDFDocument11 pagesPower Skiving PDFmadhavikNo ratings yet
- 2 Gear BasicsDocument6 pages2 Gear BasicsMohamed Adel RizkNo ratings yet
- 1 MetricGears PDFDocument9 pages1 MetricGears PDFGerardo Franco Rava0% (1)
- 5.1 Chordal Tooth Thickness MeasurementDocument20 pages5.1 Chordal Tooth Thickness Measurementsharma RISHINo ratings yet
- Lecture 4 Theory of Chips FormationDocument53 pagesLecture 4 Theory of Chips Formationnickokinyunyu11No ratings yet
- Noncircular GearsDocument6 pagesNoncircular GearsRăzvan NicolaeNo ratings yet
- Design and Analysis of Planetary Gearbox For All-Terrain VehicleDocument10 pagesDesign and Analysis of Planetary Gearbox For All-Terrain VehicleIJRASETPublications100% (1)
- Series SRX: Total StationDocument126 pagesSeries SRX: Total Stationspani20003867No ratings yet
- Profile CalculationDocument13 pagesProfile CalculationAtsis PapadopoulosNo ratings yet
- Elements of Metric Gear TechnologyDocument7 pagesElements of Metric Gear TechnologyArul Gnana John100% (1)
- Analysis of Stress and Deflection of Spur Gear by Using New Analytical Method Based On Taguchi Method and Finite Element AnalysisDocument7 pagesAnalysis of Stress and Deflection of Spur Gear by Using New Analytical Method Based On Taguchi Method and Finite Element AnalysisEditor IJTSRDNo ratings yet
- Washer Dimensions PDFDocument2 pagesWasher Dimensions PDFTarunNo ratings yet
- A Novel Hob Design: For Precision Involute GearsDocument11 pagesA Novel Hob Design: For Precision Involute GearsKalyan ChakravarthyNo ratings yet
- ShapingDocument25 pagesShapingvinayakNo ratings yet
- Nomenclature GearsDocument26 pagesNomenclature GearsDipakNo ratings yet
- Simulation GearDocument4 pagesSimulation Gearcuchuoito10No ratings yet
- Addendum Modified Gear For An All-Terrain Vehicle GearboxDocument6 pagesAddendum Modified Gear For An All-Terrain Vehicle GearboxIJRASETPublicationsNo ratings yet
- Influence of Gear Geometry On Gearbox Noise Reduction - An Experimental InvestigationDocument7 pagesInfluence of Gear Geometry On Gearbox Noise Reduction - An Experimental InvestigationsamanaveenNo ratings yet
- Design of The Drive Mechanism For A Reciprocating Coal FeederDocument81 pagesDesign of The Drive Mechanism For A Reciprocating Coal FeederemersonNo ratings yet
- Helical Gears: DefinitionDocument29 pagesHelical Gears: DefinitionMuthuvel MNo ratings yet
- Gears, Splines, and Serrations: Unit 24Document8 pagesGears, Splines, and Serrations: Unit 24Satish Dhandole100% (1)
- Limit and Fit Data BooDocument18 pagesLimit and Fit Data Booविशाल पुडासैनीNo ratings yet
- Gear DesignDocument83 pagesGear DesignmuhammadaminjamalmutNo ratings yet
- Friction Torque of A Rotary Shaft Lip SealDocument5 pagesFriction Torque of A Rotary Shaft Lip Sealmans2014No ratings yet
- Cycloidal Gear Box: Project ByDocument17 pagesCycloidal Gear Box: Project ByAjay NishadNo ratings yet
- Creo Manufacturing 4 0 PDFDocument26 pagesCreo Manufacturing 4 0 PDFtwo-1No ratings yet
- The Synthesis of Elliptical Gears Generated by Shaper-CuttersDocument9 pagesThe Synthesis of Elliptical Gears Generated by Shaper-CuttersBen TearleNo ratings yet
- Leaf SpringDocument7 pagesLeaf SpringTiago Camargo AlvesNo ratings yet
- TDocument33 pagesTTheodoros AtheridisNo ratings yet
- Translated Copy of Translated Copy of DIN 58405-1Document30 pagesTranslated Copy of Translated Copy of DIN 58405-1venkatNo ratings yet
- Shaft KeywayDocument8 pagesShaft KeywayturboconchNo ratings yet
- Sheet No. 1 Design of GearsDocument3 pagesSheet No. 1 Design of GearssallyNo ratings yet
- A Crowning Achievement For Automotive ApplicationsDocument10 pagesA Crowning Achievement For Automotive ApplicationsCan CemreNo ratings yet
- Geometry of CurvesDocument22 pagesGeometry of CurvesengnaderrNo ratings yet
- Spiral-Bevel Geometry and Gear Train Precision: L. Litvin and J. Coy?Document29 pagesSpiral-Bevel Geometry and Gear Train Precision: L. Litvin and J. Coy?Diego CarrascoNo ratings yet
- Use of Connectors in ABAQUS/Explicit To Simulate Dynamic Motion Along A Curved PathDocument15 pagesUse of Connectors in ABAQUS/Explicit To Simulate Dynamic Motion Along A Curved PathTina LoweNo ratings yet
- Grinding Wheel Profile Definition For The Manufacture of Drill FlutesDocument4 pagesGrinding Wheel Profile Definition For The Manufacture of Drill Flutesanon_459311574No ratings yet
- Design of Lobe Pair Profile of An External Rotary Lobe Pump: ND THDocument11 pagesDesign of Lobe Pair Profile of An External Rotary Lobe Pump: ND THJuan CNo ratings yet
- Direct and Inverse Kinematics of A Serial ManipulatorDocument11 pagesDirect and Inverse Kinematics of A Serial ManipulatorjdaudpotoNo ratings yet
- ISO M ThreadDocument2 pagesISO M ThreaddineshkshirsagarNo ratings yet
- Iso Metric ThreadDocument2 pagesIso Metric ThreaddineshkshirsagarNo ratings yet
- Calculation of The Tooth Root Load Carrying Capacity of Beveloid GearsDocument10 pagesCalculation of The Tooth Root Load Carrying Capacity of Beveloid GearsdineshkshirsagarNo ratings yet
- AsktheExpert PDFDocument2 pagesAsktheExpert PDFdineshkshirsagarNo ratings yet
- NN43001-106-B1 05.01 Fundamentals Features and ServicesDocument606 pagesNN43001-106-B1 05.01 Fundamentals Features and ServicesNashriq NashNo ratings yet
- ASRA SOACT Gantt Chart Project LayoutDocument4 pagesASRA SOACT Gantt Chart Project Layoutpurvi jainNo ratings yet
- Margaret Newman Nursing TheoryDocument7 pagesMargaret Newman Nursing TheoryNoreena PrincessNo ratings yet
- Maintenance of Heavy EquipmentDocument117 pagesMaintenance of Heavy EquipmentSawal Wal100% (1)
- Cisco SAN Switch Show CommandsDocument408 pagesCisco SAN Switch Show CommandsBIT- Budget Indian Traveller IndiaNo ratings yet
- Anthropogoly ReflectionDocument4 pagesAnthropogoly Reflectionapi-300780000No ratings yet
- Copenhagen AccordDocument6 pagesCopenhagen AccordQuercusCOP15No ratings yet
- Instant Download Human Development A Life Span View 7th Edition Kail Test Bank PDF Full ChapterDocument32 pagesInstant Download Human Development A Life Span View 7th Edition Kail Test Bank PDF Full Chapterhaodienb6qj100% (8)
- Parker Compumotor PDFDocument114 pagesParker Compumotor PDFismaellutz100% (1)
- Introduction TitrationDocument30 pagesIntroduction TitrationlacaranjaredNo ratings yet
- Unit 27 Assignment 1Document3 pagesUnit 27 Assignment 1api-331095474No ratings yet
- Just Breathe TabDocument1 pageJust Breathe TabDaniel BritoNo ratings yet
- Mekatronika: Oleh: Liman Hartawan Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi NasionalDocument27 pagesMekatronika: Oleh: Liman Hartawan Jurusan Teknik Mesin Fakultas Teknologi Industri Institut Teknologi NasionalYuneo NurcahyaNo ratings yet
- Mini ProjetDocument4 pagesMini ProjetgangshNo ratings yet
- Overview of Geophysical MethodsDocument41 pagesOverview of Geophysical MethodsVaqas Ali KhanNo ratings yet
- Case Study CEMEX Students)Document6 pagesCase Study CEMEX Students)Alvin Amos100% (1)
- A Vision-Based Method For The Detection of Missing Rail FastenersDocument6 pagesA Vision-Based Method For The Detection of Missing Rail FastenersShivaprasad.b.kNo ratings yet
- What Is The Difference Between A1, A2, B1 EtcDocument1 pageWhat Is The Difference Between A1, A2, B1 EtcGlory-Beast JrNo ratings yet
- K.M.Agarwal College of Arts, Commerce & Science. (Kalyan) : CertificateDocument2 pagesK.M.Agarwal College of Arts, Commerce & Science. (Kalyan) : CertificateSohham ParingeNo ratings yet
- Finite Element - Exam PrepDocument5 pagesFinite Element - Exam PrepLil A Nano World schwiftyNo ratings yet
- Ice ScrambbleDocument15 pagesIce ScrambbleJay ArNo ratings yet
- Educadores Ejovem SQLDocument8 pagesEducadores Ejovem SQLAlessandro FeitozaNo ratings yet
- Catalog LZB August-2023Document26 pagesCatalog LZB August-2023angga nugrahaNo ratings yet
- Intel 2002 : MicroprocessorsDocument25 pagesIntel 2002 : MicroprocessorsFranch Maverick Arellano LorillaNo ratings yet
- WBC DisorderDocument24 pagesWBC DisorderNirav SharmaNo ratings yet
- Toshiba KCD-10 X-Ray - Installation ManualDocument18 pagesToshiba KCD-10 X-Ray - Installation Manualkizen_5100% (2)
- Breakeven in Units Contribuiton Margin RatioDocument11 pagesBreakeven in Units Contribuiton Margin RatioCookies And CreamNo ratings yet
- Latin American InstrumentsDocument3 pagesLatin American InstrumentsVictoria Reenna CañeteNo ratings yet
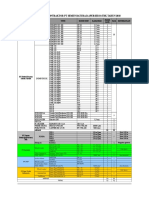
- Populasi Alat Kontraktor PT Semen Baturaja (Persero) TBK Tahun 2018Document1 pagePopulasi Alat Kontraktor PT Semen Baturaja (Persero) TBK Tahun 2018Dwiki KurniawanNo ratings yet