You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- GROUP 4 (EH2203E) : Experiment 4Document9 pagesGROUP 4 (EH2203E) : Experiment 4Nor Hamizah HassanNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Case Study-NorhamizahDocument8 pagesCase Study-NorhamizahNor Hamizah HassanNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Background Lab 5Document1 pageBackground Lab 5Nor Hamizah HassanNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- ThermoooDocument15 pagesThermoooNor Hamizah HassanNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Case Study Report-Nor Hamizah (Nasty Worldwide) PDFDocument25 pagesCase Study Report-Nor Hamizah (Nasty Worldwide) PDFNor Hamizah Hassan100% (1)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
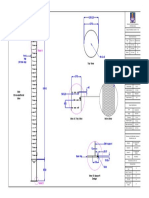
- Drawing DCDocument1 pageDrawing DCNor Hamizah HassanNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- ASSIGNMENT 2 Thermodynamic ShammilDocument17 pagesASSIGNMENT 2 Thermodynamic ShammilNor Hamizah HassanNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Case Study Report-Nor Hamizah (Nasty Worldwide) PDFDocument25 pagesCase Study Report-Nor Hamizah (Nasty Worldwide) PDFNor Hamizah Hassan100% (1)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Ent 1.0 & 4.1Document2 pagesEnt 1.0 & 4.1Nor Hamizah HassanNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- OIL SpongyDocument23 pagesOIL SpongyNor Hamizah HassanNo ratings yet
- Discussion Group 1 - Air Pollution Control PDFDocument14 pagesDiscussion Group 1 - Air Pollution Control PDFNor Hamizah HassanNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Environmental Assignment: Group DiscussionDocument5 pagesEnvironmental Assignment: Group DiscussionNor Hamizah HassanNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Norhamizahcpe615 PDFDocument3 pagesNorhamizahcpe615 PDFNor Hamizah HassanNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- (Safety & Health Officer) : Regulations 1997-ShoDocument9 pages(Safety & Health Officer) : Regulations 1997-ShoNor Hamizah HassanNo ratings yet
- Tuto5 SafetyDocument7 pagesTuto5 SafetyNor Hamizah HassanNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Tuto4 SafetyDocument3 pagesTuto4 SafetyNor Hamizah HassanNo ratings yet
- Tutorial 8Document2 pagesTutorial 8Nor Hamizah HassanNo ratings yet
- Safety Tutorial or AssignmentDocument3 pagesSafety Tutorial or AssignmentNor Hamizah HassanNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- NorHamizah Tutorial8 PDFDocument2 pagesNorHamizah Tutorial8 PDFNor Hamizah HassanNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Norhamizah Tuto3 SafetyDocument3 pagesNorhamizah Tuto3 SafetyNor Hamizah HassanNo ratings yet
- Instrumentations of Chemical ProcessDocument27 pagesInstrumentations of Chemical ProcessNor Hamizah Hassan100% (1)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Hirarc Safety 2.0Document8 pagesHirarc Safety 2.0Nor Hamizah HassanNo ratings yet
- Cbe697.Topic6.Integrated BiorefineriesDocument11 pagesCbe697.Topic6.Integrated BiorefineriesNor Hamizah HassanNo ratings yet
- CSTR ReportDocument31 pagesCSTR ReportNor Hamizah HassanNo ratings yet
- CSTR ReportDocument31 pagesCSTR ReportNor Hamizah HassanNo ratings yet
- 2-7flow Chart & Paragraph ProofsDocument25 pages2-7flow Chart & Paragraph ProofsJoel DuasoNo ratings yet
- Unit4 - T1 - TBVP SRM TutorialDocument1 pageUnit4 - T1 - TBVP SRM Tutorialnobita upmanyuNo ratings yet
- 3.applications of Fourier TransformDocument24 pages3.applications of Fourier TransformManpreet SinghNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Mathematics For ExamDocument21 pagesMathematics For ExamRenz PagcaliwaganNo ratings yet
- Math 001Document22 pagesMath 001Néè RozNo ratings yet
- Programming Practice (Solved 100+ Version 1)Document99 pagesProgramming Practice (Solved 100+ Version 1)Iqra IjazNo ratings yet
- Class: Nursery Course Price ListDocument10 pagesClass: Nursery Course Price ListAzhar HussainNo ratings yet
- Insight 2016 Mathematical Methods Examination 1 SolutionsDocument15 pagesInsight 2016 Mathematical Methods Examination 1 SolutionsnochnochNo ratings yet
- Luanvf MSthesisDocument103 pagesLuanvf MSthesisTedNo ratings yet
- Effect of Load Increase and Power System StabilizeDocument14 pagesEffect of Load Increase and Power System StabilizeLê Trung DũngNo ratings yet
- Mathematical Solution of Kronig-Penney Model DeterminantDocument7 pagesMathematical Solution of Kronig-Penney Model DeterminantIJRASETPublicationsNo ratings yet
- Numerical DifferentiationDocument3 pagesNumerical DifferentiationGustavo LibotteNo ratings yet
- (English) How To Use The Quadratic Formula in Chemistry (DownSub - Com)Document5 pages(English) How To Use The Quadratic Formula in Chemistry (DownSub - Com)ikhsania utamiNo ratings yet
- Topic: Non-Negative Matrix Factorisation: Assignment - 2Document6 pagesTopic: Non-Negative Matrix Factorisation: Assignment - 2Bushra KamboNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Christmas Revision 2022Document5 pagesChristmas Revision 2022Nicole Vassallo ♥️No ratings yet
- Chapter 4Document21 pagesChapter 4inirreNo ratings yet
- AI-based Adaptive Control and Design of Autopilot System For Nonlinear UAVDocument19 pagesAI-based Adaptive Control and Design of Autopilot System For Nonlinear UAVoluwakayode olabanjiNo ratings yet
- North Sydney Boys 2019 3U Trials & SolutionsDocument29 pagesNorth Sydney Boys 2019 3U Trials & SolutionsNhan LeNo ratings yet
- Aplicacion Corto 3Document5 pagesAplicacion Corto 3Garbel LemusNo ratings yet
- PHD ThesisDocument200 pagesPHD ThesisKishore CkNo ratings yet
- Math C241:Mathematics - Iii: Bits-Pilani Hyderabad CampusDocument39 pagesMath C241:Mathematics - Iii: Bits-Pilani Hyderabad CampusVanshaj AggarwalNo ratings yet
- 1 Number of Operations (25 Points)Document3 pages1 Number of Operations (25 Points)aniket patelNo ratings yet
- ReflectionsDocument22 pagesReflectionschristian ursaizNo ratings yet
- Living Case Study Acme AutomotiveDocument16 pagesLiving Case Study Acme AutomotivegreiwecNo ratings yet
- TOA1 - 02b Plane & Its AttributesDocument4 pagesTOA1 - 02b Plane & Its Attributesarkiosk100% (4)
- XII STD - Statistics English MediumDocument280 pagesXII STD - Statistics English MediumSuvendu ChoudhuryNo ratings yet
- 2-3.eye Level - Math Curriculum - NewDocument2 pages2-3.eye Level - Math Curriculum - Newsyahab solehudinNo ratings yet
- 37161: Probability and Random Variables: Uts:ScienceDocument17 pages37161: Probability and Random Variables: Uts:ScienceDavid GunawanNo ratings yet
- Order of Operations With Fractions (A)Document2 pagesOrder of Operations With Fractions (A)Dhon ValeNo ratings yet
- Data Mining - ClassificationDocument53 pagesData Mining - ClassificationAndi WijayaNo ratings yet
- A Brief History of Time: From the Big Bang to Black HolesFrom EverandA Brief History of Time: From the Big Bang to Black HolesRating: 4 out of 5 stars4/5 (2193)
- Dark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseFrom EverandDark Matter and the Dinosaurs: The Astounding Interconnectedness of the UniverseRating: 3.5 out of 5 stars3.5/5 (69)
- A Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceFrom EverandA Beginner's Guide to Constructing the Universe: The Mathematical Archetypes of Nature, Art, and ScienceRating: 4 out of 5 stars4/5 (51)
- Knocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldFrom EverandKnocking on Heaven's Door: How Physics and Scientific Thinking Illuminate the Universe and the Modern WorldRating: 3.5 out of 5 stars3.5/5 (64)
- Summary and Interpretation of Reality TransurfingFrom EverandSummary and Interpretation of Reality TransurfingRating: 5 out of 5 stars5/5 (5)