You might also like
- The Spectral Theory of Toeplitz Operators. (AM-99), Volume 99From EverandThe Spectral Theory of Toeplitz Operators. (AM-99), Volume 99No ratings yet
- XMT7100 Temperature Temp Controller SSR Output Drive Arizona Phoenix - 3Document10 pagesXMT7100 Temperature Temp Controller SSR Output Drive Arizona Phoenix - 3Pedro SousaNo ratings yet
- Tet-612 Pid ManualDocument7 pagesTet-612 Pid ManualvhelectronicaNo ratings yet
- JLD612 ManualDocument8 pagesJLD612 ManualEvTech PhilNo ratings yet
- JLD612 ManualDocument7 pagesJLD612 ManualtellnerNo ratings yet
- Instruction Manual: PID Temperature Controllers For Espresso Machines - 09/08/2007Document12 pagesInstruction Manual: PID Temperature Controllers For Espresso Machines - 09/08/2007TomNo ratings yet
- Single Loop PID Controllers for Precise Process ControlDocument2 pagesSingle Loop PID Controllers for Precise Process ControlKalpesh YadavNo ratings yet
- TC544A ConexiónDocument2 pagesTC544A ConexiónMartin GaonaNo ratings yet
- T3S/T3H/T4M/T4L: Digital Switch Setting Type, Temperature ControllerDocument5 pagesT3S/T3H/T4M/T4L: Digital Switch Setting Type, Temperature ControllerMin ZayarNo ratings yet
- Anly Temperature SensorDocument4 pagesAnly Temperature SensorPiena DīzelisNo ratings yet
- Digital temperature controller series ETC 601Document2 pagesDigital temperature controller series ETC 601Kunjan DabhiNo ratings yet
- JLD612 Manual 2011Document8 pagesJLD612 Manual 2011cacaNo ratings yet
- Instruction Manual: 1. Product HighlightsDocument7 pagesInstruction Manual: 1. Product HighlightsNick RossNo ratings yet
- DT-96Y/72Y/48Y PID Temperature Controller SpecsDocument4 pagesDT-96Y/72Y/48Y PID Temperature Controller SpecsAmri ChakerNo ratings yet
- HY Hanyoung Series CatalogueDocument2 pagesHY Hanyoung Series CatalogueTrần NguyênNo ratings yet
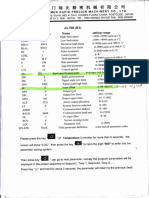
- Hiiffiwffisillffihpeae: Ix (QlfifeiDocument1 pageHiiffiwffisillffihpeae: Ix (QlfifeiAnonymous 40OROSlNTNo ratings yet
- TR - Ttffitrffisfrlffiape E: T Set:Alge NameDocument1 pageTR - Ttffitrffisfrlffiape E: T Set:Alge NameAnonymous 40OROSlNTNo ratings yet
- DeltaDocument13 pagesDeltaNguyễn Minh CườngNo ratings yet
- Rev. 0 - PhysPropAcetonitrile - ACN - HCNDocument10 pagesRev. 0 - PhysPropAcetonitrile - ACN - HCNPhượng NguyễnNo ratings yet
- ttm-000 eDocument6 pagesttm-000 eMaitry ShahNo ratings yet
- SR4 ControladorDocument2 pagesSR4 ControladorErick Gabriel Chiroque SilopúNo ratings yet
- SI-1010G SankenDocument6 pagesSI-1010G SankenTiziano Isoc100% (1)
- CH6 Series Digital Instrument Specification SheetDocument3 pagesCH6 Series Digital Instrument Specification SheetrobertoNo ratings yet
- sr1 - 3 - 4 - C - ShimadenDocument2 pagessr1 - 3 - 4 - C - ShimadenFernandoNo ratings yet
- T4LP Dual Setting Temperature ControllerDocument4 pagesT4LP Dual Setting Temperature ControllerMin ZayarNo ratings yet
- Temperature Controller Catalog - EngDocument9 pagesTemperature Controller Catalog - EngJuan Gervacio OrtegaNo ratings yet
- XMTG-818(T) digital temperature controller manualDocument6 pagesXMTG-818(T) digital temperature controller manualyesdanNo ratings yet
- LTCS20020WDocument51 pagesLTCS20020Wmanipurimultimedia1No ratings yet
- TC544 244 344Document2 pagesTC544 244 344kiranas1990No ratings yet
- YX9200 Series Synchronous machine drive User ManualDocument58 pagesYX9200 Series Synchronous machine drive User ManualJAFETT ESCOBAL HUAMANNo ratings yet
- Temperature Controller: E5CS-XDocument10 pagesTemperature Controller: E5CS-XManu NNo ratings yet
- Solved Exmaples PDFDocument2 pagesSolved Exmaples PDFnigus hailu100% (1)
- ElemcoDocument11 pagesElemcoAlaa MohammedNo ratings yet
- TRD_TADocument2 pagesTRD_TALouie FernandezNo ratings yet
- DTB ManualDocument13 pagesDTB ManualJorge BurbanoNo ratings yet
- TT2,3,4,5N Temperature Sensor Transmitter SeriesDocument1 pageTT2,3,4,5N Temperature Sensor Transmitter Seriesmohamed mansourNo ratings yet
- TC Series: Single Display, PID Control Temperature ControllerDocument14 pagesTC Series: Single Display, PID Control Temperature ControllerKuldeepPaulNo ratings yet
- Temperature Controller E5C2Document6 pagesTemperature Controller E5C2MuhammadNo ratings yet
- Series Temperature Controller Instruction SheetDocument13 pagesSeries Temperature Controller Instruction SheetbundzsyNo ratings yet
- TC544 TC244 TC344 PDFDocument3 pagesTC544 TC244 TC344 PDFGaurav AgrawalNo ratings yet
- Alla Hu AbkarDocument5 pagesAlla Hu AbkarJatin VermaNo ratings yet
- HT7218 HoltekSemiconductorDocument14 pagesHT7218 HoltekSemiconductorLeonardo QuinteroNo ratings yet
- Obsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)Document11 pagesObsolete Product(s) - Obsolete Product(s) Obsolete Product(s) - Obsolete Product(s)faithnicNo ratings yet
- Micro ScannerDocument2 pagesMicro ScannerArun KumarNo ratings yet
- XMT-JK8 enDocument4 pagesXMT-JK8 enhicham boutoucheNo ratings yet
- TC513 TC203 TC303Document2 pagesTC513 TC203 TC303Ajay Kumar GiriNo ratings yet
- Etc 4420Document4 pagesEtc 4420mileniumtemucoNo ratings yet
- HT640 DatasheetDocument13 pagesHT640 Datasheetmanojram18No ratings yet
- Digital switch setting type temperature controller featuresDocument5 pagesDigital switch setting type temperature controller featuresjuampanaNo ratings yet
- Yudian AI-5500 Handheld Digital Thermometer ManualDocument27 pagesYudian AI-5500 Handheld Digital Thermometer ManualUmang SOdhiNo ratings yet
- Multispan TC-19Document4 pagesMultispan TC-19Karan SolankiNo ratings yet
- Temperature Controller - PID PID500: FeaturesDocument3 pagesTemperature Controller - PID PID500: FeaturesUhule PeterNo ratings yet
- DC1010, 1020, 1030, 1040 Startup Guide Input, Alarms and TuningDocument15 pagesDC1010, 1020, 1030, 1040 Startup Guide Input, Alarms and TuningAbraham Elizondo ÆNo ratings yet
- Masibus 8208 - R1F - 0515 - 8 CH Scanner - DAQ ModuleDocument2 pagesMasibus 8208 - R1F - 0515 - 8 CH Scanner - DAQ Modulemohan babuNo ratings yet
- SHARE UAV BROCHURE (1)Document5 pagesSHARE UAV BROCHURE (1)fadhliakbar87No ratings yet
- XMT-5000 Switch Power Controller Operation GuideDocument4 pagesXMT-5000 Switch Power Controller Operation GuideNather Alusofy0% (1)
- St8 Series Intelligent Temperature Sensor Specialties Digit Display Meter 1. PanelDocument3 pagesSt8 Series Intelligent Temperature Sensor Specialties Digit Display Meter 1. PanelmafetaroNo ratings yet
- Marco Vardaro - PHD Thesis - 2018 01 14 (137-143)Document7 pagesMarco Vardaro - PHD Thesis - 2018 01 14 (137-143)mjd rNo ratings yet
- Lecture 6 The Engineer S Transit and Theodolite PDFDocument10 pagesLecture 6 The Engineer S Transit and Theodolite PDFleah mae arnaez100% (1)
- Usbr1020 PDFDocument3 pagesUsbr1020 PDFAbdul Ghafoor100% (1)
- Chapter Three:: Anatomy of A Curved MirrorDocument23 pagesChapter Three:: Anatomy of A Curved MirrorKay LagunaNo ratings yet
- Norita - Pharmaceutical Engineering 5 - Exercise 1Document2 pagesNorita - Pharmaceutical Engineering 5 - Exercise 1Norita TjhinNo ratings yet
- Me8491 em Unit - IIDocument119 pagesMe8491 em Unit - IIParameswara Raja100% (1)
- ASP Hearing 2007Document136 pagesASP Hearing 2007Ahmad Faizal BustomiNo ratings yet
- Lecture 4 - Application To Manometry PDFDocument15 pagesLecture 4 - Application To Manometry PDFLendo PosaraNo ratings yet
- User Manual Notch ApparatusDocument4 pagesUser Manual Notch Apparatusrohit kumarNo ratings yet
- Transformer Core Types and ConstructionsDocument14 pagesTransformer Core Types and ConstructionsKashif IftikharNo ratings yet
- Addressing Plugging Wear Spillage TransferchutesDocument43 pagesAddressing Plugging Wear Spillage Transferchutesmishra_1982No ratings yet
- Measurement of Force, Torque and SpeedDocument18 pagesMeasurement of Force, Torque and SpeedErxDNo ratings yet
- Albert Einstein - Wikipedia, The Free EncyclopediaDocument34 pagesAlbert Einstein - Wikipedia, The Free EncyclopediaalhanunNo ratings yet
- Api 650Document42 pagesApi 650samvendan100% (1)
- FINAL Induction Heating CPP REPORTDocument32 pagesFINAL Induction Heating CPP REPORTPrasadNo ratings yet
- Periodic Classification of ElementsDocument2 pagesPeriodic Classification of ElementsADWAITH LALUNo ratings yet
- 15 1Document3 pages15 1Aditya MishraNo ratings yet
- Chapter 2 Bipolar Junction TransistorDocument36 pagesChapter 2 Bipolar Junction TransistorFilipe da SilveiraNo ratings yet
- Francis and Kaplan Reaction TurbinesDocument5 pagesFrancis and Kaplan Reaction TurbinesfahadNo ratings yet
- Retentores - ParkerpdfDocument68 pagesRetentores - ParkerpdfdilsonramosNo ratings yet
- Low Thermal Conductivity Elastomeric InsulationDocument5 pagesLow Thermal Conductivity Elastomeric InsulationManuel MoranNo ratings yet
- 纺纱学双语Document653 pages纺纱学双语Gizachew Zeleke100% (1)
- Autogenous, Semi-Auto-Genous and Ball Mills For Wet and Dry GrindingDocument16 pagesAutogenous, Semi-Auto-Genous and Ball Mills For Wet and Dry Grindingmushava nyoka100% (1)
- Hydrotest Blind PDFDocument9 pagesHydrotest Blind PDFManu Jojo100% (1)
- Lesson 26 Basic Tools of Fitting and Sheet Metal Work, Sheet Metal OperationsDocument4 pagesLesson 26 Basic Tools of Fitting and Sheet Metal Work, Sheet Metal OperationsSubash NagaNo ratings yet
- Weldox 960 Data SheetDocument2 pagesWeldox 960 Data SheetRui SantosNo ratings yet
- Ideas of Ancient Greeks On AtomsDocument24 pagesIdeas of Ancient Greeks On AtomsJean Carmel NoveloNo ratings yet
- Inc Germanium Phosphide: Features.Document4 pagesInc Germanium Phosphide: Features.MatNo ratings yet
- Premium Connection SummaryOKDocument12 pagesPremium Connection SummaryOKnikhil_barshettiwatNo ratings yet
- Coanda Screen Design GuidanceDocument44 pagesCoanda Screen Design GuidanceEstefania Agudelo OrregoNo ratings yet
- 389-Article Text-1590-1-10-20230129Document6 pages389-Article Text-1590-1-10-20230129wahyu satriaNo ratings yet