You might also like
- Semiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsFrom EverandSemiconductor Data Book: Characteristics of approx. 10,000 Transistors, FETs, UJTs, Diodes, Rectifiers, Optical Semiconductors, Triacs and SCRsNo ratings yet
- PLC (English Version) FX1N MODBUSDocument12 pagesPLC (English Version) FX1N MODBUSsplinter incNo ratings yet
- Haitian Series: Haitian International Holdings LimitedDocument6 pagesHaitian Series: Haitian International Holdings LimitedDenisa PopNo ratings yet
- Swagelok Hand Tube Bender ManualDocument32 pagesSwagelok Hand Tube Bender Manualharrywj100% (1)
- BLDC Motor Drive PDFDocument83 pagesBLDC Motor Drive PDFrijilpoothadi100% (1)
- Rexa Manual x2 Iom 10-2014Document294 pagesRexa Manual x2 Iom 10-2014AH100% (1)
- CH6 Manual XModdzDocument4 pagesCH6 Manual XModdzrobertoNo ratings yet
- Wireless Bomb Disposal Robot Project ReportDocument57 pagesWireless Bomb Disposal Robot Project Reportएक मराठा लाख मराठाNo ratings yet
- CH6 Series Digital Instrument Specification SheetDocument3 pagesCH6 Series Digital Instrument Specification SheetrobertoNo ratings yet
- Sigma SGDB User's Manual (E) PDFDocument530 pagesSigma SGDB User's Manual (E) PDF류성하0% (1)
- Manual ZelioDocument177 pagesManual ZeliopetreNo ratings yet
- Kaito ManualDocument150 pagesKaito ManualChugo LimaNo ratings yet
- DCL400Document2 pagesDCL400taleb 6269No ratings yet
- Programmable Resistance Isolating Transmitters 06220002 - v10-PSKDocument4 pagesProgrammable Resistance Isolating Transmitters 06220002 - v10-PSKjemley antzNo ratings yet
- Universal Process Controller N3000: Option 1: RS485 Digital Communication Interface With Modbus RTU ProtocolDocument1 pageUniversal Process Controller N3000: Option 1: RS485 Digital Communication Interface With Modbus RTU ProtocolSerch Estrada CastellónNo ratings yet
- N2006 PidDocument8 pagesN2006 PidSarah KempNo ratings yet
- TH Series Temperature Controller PDFDocument11 pagesTH Series Temperature Controller PDFjohnNo ratings yet
- Transmisor de Temperatura Omegaette TXDIN70Document8 pagesTransmisor de Temperatura Omegaette TXDIN70Josue ConstenlaNo ratings yet
- HY Hanyoung Series CatalogueDocument2 pagesHY Hanyoung Series CatalogueTrần NguyênNo ratings yet
- PEL+2500Technical+brochure-en USDocument1 pagePEL+2500Technical+brochure-en USSTEFANALINLUCIANNo ratings yet
- New Product Launch Announcement - DVP02LC-SLDocument6 pagesNew Product Launch Announcement - DVP02LC-SLAquiles VergaraNo ratings yet
- 2CH Digital Indicator With Alarm Functions Under 40 CharactersDocument4 pages2CH Digital Indicator With Alarm Functions Under 40 CharactersMohammad HosseinNo ratings yet
- Smart TripDocument2 pagesSmart TripkaicyemNo ratings yet
- Temperature Controller tc9Document2 pagesTemperature Controller tc9Vishesh BankarNo ratings yet
- Technical Information: Application Benefits at A GlanceDocument10 pagesTechnical Information: Application Benefits at A GlanceNajam SiddiquiNo ratings yet
- Anly Temperature SensorDocument4 pagesAnly Temperature SensorPiena DīzelisNo ratings yet
- AP6203A AnwellSemiconductorDocument25 pagesAP6203A AnwellSemiconductorinfosolutionNo ratings yet
- L7900 Series: Negative Voltage RegulatorsDocument13 pagesL7900 Series: Negative Voltage Regulatorsmhd_almahayniNo ratings yet
- Ma - Maxtech - Mc2 - EngDocument11 pagesMa - Maxtech - Mc2 - EngCsaba VargaNo ratings yet
- E-Y-700-V2 User ManualDocument2 pagesE-Y-700-V2 User Manualnyq9g6yrpgNo ratings yet
- Cat 662R0-SLT PDFDocument9 pagesCat 662R0-SLT PDFk v s s GuptaNo ratings yet
- HDR 100Document4 pagesHDR 100oscarNo ratings yet
- 7915Document13 pages7915ysfhkNo ratings yet
- Sup St500 Temperature Transmitter User ManualDocument2 pagesSup St500 Temperature Transmitter User ManualWolf BlackNo ratings yet
- Shimaden Digital Controller: SR1 / SR3 / SR4Document2 pagesShimaden Digital Controller: SR1 / SR3 / SR4Ferni_6028No ratings yet
- 7912CT EtcDocument13 pages7912CT EtcCuong TranNo ratings yet
- Specifications Specifications SpecificationsDocument1 pageSpecifications Specifications SpecificationsJuan K PeñaNo ratings yet
- SCONI-2000 enDocument3 pagesSCONI-2000 enm370550647No ratings yet
- Cs2-Va Volt / Current Meter: DescriptionDocument8 pagesCs2-Va Volt / Current Meter: DescriptioncnmengineeringNo ratings yet
- Shenzhen Southern LCS Compliance Testing Laboratory LTD.: Streetlight Photometric Test ReportDocument10 pagesShenzhen Southern LCS Compliance Testing Laboratory LTD.: Streetlight Photometric Test ReportAnouer BelkadiNo ratings yet
- DB1000 Digital Controller for Precise Temperature ControlDocument8 pagesDB1000 Digital Controller for Precise Temperature ControlChoirul MutamamNo ratings yet
- TIM-94N / TIM-94N-B / TIM-94N-BN: DescriptionDocument5 pagesTIM-94N / TIM-94N-B / TIM-94N-BN: Descriptionluat1983No ratings yet
- Smartcon 4000Document20 pagesSmartcon 4000செல்வமாரியப்பன் சீனிவாசன்No ratings yet
- ESM Xx20 Manual MultilenguajeDocument64 pagesESM Xx20 Manual MultilenguajeRonal IsnadoNo ratings yet
- CRI P 340 - EngDocument4 pagesCRI P 340 - EngJerNo ratings yet
- Apit Massibus PDFDocument20 pagesApit Massibus PDFkaleesuwariNo ratings yet
- TXDIN70Document1 pageTXDIN70senthilrsenthilNo ratings yet
- KN-2000W en Tcd210154ac 220324 Inst WDocument2 pagesKN-2000W en Tcd210154ac 220324 Inst WHardi KurniawanNo ratings yet
- Mechanical Melt Pressure Gauge: Pt135 Series Pt135 SeriesDocument2 pagesMechanical Melt Pressure Gauge: Pt135 Series Pt135 SeriesSousou SanyNo ratings yet
- DVP-ES2 Series PLC Electrical Specifications GuideDocument19 pagesDVP-ES2 Series PLC Electrical Specifications Guidetoanck86No ratings yet
- 53MY - E-Cap15-16WR Series SAMXONDocument5 pages53MY - E-Cap15-16WR Series SAMXONtoninoleNo ratings yet
- NHDD-40: DC-DC Constant Current Driver With DC 380V InputDocument6 pagesNHDD-40: DC-DC Constant Current Driver With DC 380V Inputfhfgh gjgfhNo ratings yet
- AKG C422, C34, C33 Stereophonic Condenser MicrophonesDocument4 pagesAKG C422, C34, C33 Stereophonic Condenser MicrophonesMario CrispiNo ratings yet
- 4-20 Ma To Current Converter: P/N: IC-DR-XX and AX130300Document3 pages4-20 Ma To Current Converter: P/N: IC-DR-XX and AX130300Gloria HamiltonNo ratings yet
- XC6203 DatasheetDocument22 pagesXC6203 DatasheetAndre CarpenterNo ratings yet
- PD9001Document13 pagesPD9001Sher BahadarNo ratings yet
- TranducerDocument3 pagesTranducerkhoadang81196No ratings yet
- Linear Servomotor General Instructions: Serial Converter Unit (Model: JZDP-¡00¡-¡¡¡-E)Document8 pagesLinear Servomotor General Instructions: Serial Converter Unit (Model: JZDP-¡00¡-¡¡¡-E)Edwin Aguila CerónNo ratings yet
- DPT Flow Series Datasheet-10.0Document2 pagesDPT Flow Series Datasheet-10.0João RigorNo ratings yet
- Process Indicators: Ordering InformationDocument3 pagesProcess Indicators: Ordering InformationRajesh KumarNo ratings yet
- MDL107 EngDocument3 pagesMDL107 EngC&P GroupNo ratings yet
- Industrial Automation Companies India - Canopus InstrumentsDocument2 pagesIndustrial Automation Companies India - Canopus InstrumentscanopusinstrumentsNo ratings yet
- T3S/T3H/T4M/T4L: Digital Switch Setting Type, Temperature ControllerDocument5 pagesT3S/T3H/T4M/T4L: Digital Switch Setting Type, Temperature ControllerMin ZayarNo ratings yet
- REX Century Series PID Controllers GuideDocument5 pagesREX Century Series PID Controllers Guidepite3No ratings yet
- Process Control Instruments India - Canopus InstrumentsDocument2 pagesProcess Control Instruments India - Canopus InstrumentscanopusinstrumentsNo ratings yet
- DAC0800/DAC0802 8-Bit Digital-to-Analog Converters: General DescriptionDocument0 pagesDAC0800/DAC0802 8-Bit Digital-to-Analog Converters: General DescriptionMiguel Angel García ValerioNo ratings yet
- DPT100: Resistance Transducer: Compact, Configurable Resistance TransducersDocument4 pagesDPT100: Resistance Transducer: Compact, Configurable Resistance TransducersTeguh WaluyoNo ratings yet
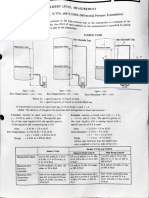
- Level TransmitterDocument1 pageLevel TransmitterAlaa MohammedNo ratings yet
- ControlEdge HC900 IO Modules SpecsDocument35 pagesControlEdge HC900 IO Modules SpecsAlaa MohammedNo ratings yet
- HC900 Erie Release Technical Details EmeaDocument4 pagesHC900 Erie Release Technical Details EmeaAlaa MohammedNo ratings yet
- Analog Input RTPDocument8 pagesAnalog Input RTPAlaa MohammedNo ratings yet
- Owner's Manual For Chery Tiggo FLDocument154 pagesOwner's Manual For Chery Tiggo FLAlaa Mohammed100% (9)
- TC Color CodesDocument7 pagesTC Color CodesSurya SenthilnathanNo ratings yet
- 3500 Software Datasheet 141527Document4 pages3500 Software Datasheet 141527Shubham SinghNo ratings yet
- Brochure 2600t - 266 - 261 - IngDocument8 pagesBrochure 2600t - 266 - 261 - IngAlaa MohammedNo ratings yet
- 2a 1c13cDocument24 pages2a 1c13cAlaa MohammedNo ratings yet
- Prospecto SPS D BH3000Document4 pagesProspecto SPS D BH3000Marcos Zimmermann100% (1)
- AMC-KM CA 000246 RevF EN-mobile PDFDocument220 pagesAMC-KM CA 000246 RevF EN-mobile PDFray rayNo ratings yet
- Design, Fabrication and Analysis of Bipedal Walking RobotDocument5 pagesDesign, Fabrication and Analysis of Bipedal Walking RobotChawki Choura100% (1)
- MC403 Datasheet PDFDocument3 pagesMC403 Datasheet PDFHellen MontañaNo ratings yet
- NC Studio Controller ATC ManualDocument87 pagesNC Studio Controller ATC ManualMajid RakhshiNo ratings yet
- Question Bank For 1st UNIT - MHB4117 - BMTDocument9 pagesQuestion Bank For 1st UNIT - MHB4117 - BMTKuppan Chetty RamanathanNo ratings yet
- CH 1 Introduction To RoboticsDocument20 pagesCH 1 Introduction To RoboticsAbenezer TasewNo ratings yet
- AirpaxCatalog PDFDocument44 pagesAirpaxCatalog PDFjorge furtado de freitasNo ratings yet
- Sinumerik: Intelligent Solutions For Machine ToolsDocument36 pagesSinumerik: Intelligent Solutions For Machine ToolsdiegoNo ratings yet
- Exercise Solution of Chapter 3Document8 pagesExercise Solution of Chapter 3Engr ShabirNo ratings yet
- LINEAR SERVO MDS-B Series SPECIFICATIONS AND INSTRUCTION MANDocument188 pagesLINEAR SERVO MDS-B Series SPECIFICATIONS AND INSTRUCTION MANEdimilson RodriguesNo ratings yet
- Flyer MCS Synchronous Servo Motors en-GBDocument2 pagesFlyer MCS Synchronous Servo Motors en-GBMahirNo ratings yet
- User Manual GalilDocument219 pagesUser Manual GalilJuanc BautistaNo ratings yet
- MR-JE Brochure I03086Document140 pagesMR-JE Brochure I03086MARIO RAMIREZ CABRERANo ratings yet
- DCM Series Brushed Servo Motors: Electrical SpecificationsDocument3 pagesDCM Series Brushed Servo Motors: Electrical SpecificationsNguyen Van ThaiNo ratings yet
- Hardware Manual of The Easy Servo Drives: ES-DH SeriesDocument28 pagesHardware Manual of The Easy Servo Drives: ES-DH Serieshuutan12345No ratings yet
- Bluetooth Controlled Arduino Robotic Arm JournalDocument6 pagesBluetooth Controlled Arduino Robotic Arm JournalKarneshwar SannamaniNo ratings yet
- Sigma 7 FT Indexing Manual PDFDocument267 pagesSigma 7 FT Indexing Manual PDFIchal DafianNo ratings yet
- 2006 Clutch, Brake, Tension Controller CatalogDocument136 pages2006 Clutch, Brake, Tension Controller Catalogvan Dai phamNo ratings yet
- Adt Series Motion Control CardDocument97 pagesAdt Series Motion Control Cardfelipedelio100% (1)
- List Stock F28, B737-200Document16 pagesList Stock F28, B737-200sssavNo ratings yet
- Robot 1a PDFDocument62 pagesRobot 1a PDFJois Lenny Mendoza LoayzaNo ratings yet