You might also like
- Introduction, Abstract, Conclusion, ReferenceDocument4 pagesIntroduction, Abstract, Conclusion, ReferenceChiu Fong50% (2)
- Classical Mechanics Notes SummaryDocument149 pagesClassical Mechanics Notes SummaryKaran Gupta100% (1)
- Mechanical Design and Optimal Control of HumanoidDocument12 pagesMechanical Design and Optimal Control of HumanoidDavi AssunçãoNo ratings yet
- Design and Development of One Degree of Freedom Upper Limb ExoskeletonDocument6 pagesDesign and Development of One Degree of Freedom Upper Limb ExoskeletonWarnithaNo ratings yet
- 0620Document7 pages0620Shahrzad GhasemiNo ratings yet
- 25. VAM Hypocycloid Mechanism for Efficient Bioinspired Robotic GaitsDocument7 pages25. VAM Hypocycloid Mechanism for Efficient Bioinspired Robotic GaitsMEMONCHAS NEMOZNo ratings yet
- Design and control of an under-actuated robot leg using state feedback and impulse shapingDocument6 pagesDesign and control of an under-actuated robot leg using state feedback and impulse shapinganiket sahooNo ratings yet
- Research Article: Design of Information Acquisition and Control System For The Exoskeleton RobotDocument8 pagesResearch Article: Design of Information Acquisition and Control System For The Exoskeleton RobotHarshesh GokaniNo ratings yet
- Imitation-Based Motion Planning and Control of A MDocument8 pagesImitation-Based Motion Planning and Control of A Mabdelhamid.ghoul93No ratings yet
- Design and Manufacturing of A Mobile Rescue Robot: S. Ali A. Moosavian Hesam Semsarilar Arash KalantariDocument6 pagesDesign and Manufacturing of A Mobile Rescue Robot: S. Ali A. Moosavian Hesam Semsarilar Arash KalantariPutri metapowerNo ratings yet
- Design and Implementation of A Soft Robotic Arm Driven by SMA CoilsDocument9 pagesDesign and Implementation of A Soft Robotic Arm Driven by SMA CoilsBreiner ObregonNo ratings yet
- Mechatronic Design of A Four Wheel Steering Mobile Robot With Fault-Tolerant Odometry FeedbackDocument7 pagesMechatronic Design of A Four Wheel Steering Mobile Robot With Fault-Tolerant Odometry FeedbackharishNo ratings yet
- Icarm 2019 8834229Document6 pagesIcarm 2019 8834229VladimirNo ratings yet
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 pagesEEE 1207 021 6 DOF Robotic Arm ManipulatorUNsha bee komNo ratings yet
- Modular Robot for Testing Control AlgorithmsDocument7 pagesModular Robot for Testing Control AlgorithmsAlina MirelaNo ratings yet
- ESME Tadele B. Tuli and Tesfaye O. TerefeDocument9 pagesESME Tadele B. Tuli and Tesfaye O. TerefeTesfayeNo ratings yet
- Control Passive Mobile Robots For Object Transportation - Braking Torque Analysis and Motion ControlDocument7 pagesControl Passive Mobile Robots For Object Transportation - Braking Torque Analysis and Motion ControlLuis Slender Corimanya (NikeTiM)No ratings yet
- A Mobile Robot With Autonomous Climbing and DescenDocument19 pagesA Mobile Robot With Autonomous Climbing and DescenAprida HutagalungNo ratings yet
- (2006) Modeling and simulation of biped kinematics using bond-graphsDocument6 pages(2006) Modeling and simulation of biped kinematics using bond-graphsPaul AlvarezNo ratings yet
- Light-Weight RobotsDocument6 pagesLight-Weight Robotsأحمد دعبسNo ratings yet
- 2014 Bracing The Human Body With Supernumerary Robotic Limbs ForDocument8 pages2014 Bracing The Human Body With Supernumerary Robotic Limbs ForANSHUMAAN P BHAGATNo ratings yet
- 7 Degree-of-Freedom Upper-Limb Powered Exoskeleton DesignDocument6 pages7 Degree-of-Freedom Upper-Limb Powered Exoskeleton Designfaizar_2No ratings yet
- Design of Modular Snake RobotDocument6 pagesDesign of Modular Snake RobotShoeb Ahmed SyedNo ratings yet
- AR2398 Expochamacos 9aDocument30 pagesAR2398 Expochamacos 9aJose AguilarNo ratings yet
- A Robotic Cane For Balance Maintenance AssistanceDocument12 pagesA Robotic Cane For Balance Maintenance AssistancesouravNo ratings yet
- A Robotic Arm Using Pneumatic Movers PDFDocument7 pagesA Robotic Arm Using Pneumatic Movers PDFnovalandikaNo ratings yet
- AILA - Design of An Autonomous Mobile Dual-Arm RobotDocument8 pagesAILA - Design of An Autonomous Mobile Dual-Arm RobotMarília PioNo ratings yet
- 48 Teleoperation of A Mobile Robot Using ADocument11 pages48 Teleoperation of A Mobile Robot Using AEmilia FeliciaNo ratings yet
- Design of Six Legged Spider Robot and Evolving Walking AlgorithmsDocument6 pagesDesign of Six Legged Spider Robot and Evolving Walking AlgorithmsNgọc Minh LêNo ratings yet
- Modeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Document8 pagesModeling and Analysis of A 6 DOF Robotic Arm Manipulator: January 2012Georgiana BunghiuzNo ratings yet
- A Novel Discrete Wire-Driven Continuum Robot Arm With Passive Sliding Disc: Design, Kinematics and Passive Tension ControlDocument18 pagesA Novel Discrete Wire-Driven Continuum Robot Arm With Passive Sliding Disc: Design, Kinematics and Passive Tension ControlnoxoNo ratings yet
- Amphibious Robot II PDFDocument6 pagesAmphibious Robot II PDFAman TripathiNo ratings yet
- Delta Robot Literature Riview PDFDocument11 pagesDelta Robot Literature Riview PDFArif AbbasiNo ratings yet
- 1.1. A Sense of HistoryDocument8 pages1.1. A Sense of HistoryCarlitos FerNo ratings yet
- Robotics and Vision System - TMTE 503 (Unit 1)Document14 pagesRobotics and Vision System - TMTE 503 (Unit 1)Raunak GuptaNo ratings yet
- Design and Control of Mobile Robot With Mecanum Wheel: September 2009Document7 pagesDesign and Control of Mobile Robot With Mecanum Wheel: September 2009Vishal KashyapNo ratings yet
- Objective & Outcome of RoboticsDocument3 pagesObjective & Outcome of RoboticsMechanicalNo ratings yet
- Learning To Walk in 20 Minutes: Russt@csail - Mit.edu Resa@berkeley - Edu Seung@mit - EduDocument6 pagesLearning To Walk in 20 Minutes: Russt@csail - Mit.edu Resa@berkeley - Edu Seung@mit - EduTaylan Utku MertNo ratings yet
- Design and Implementation of Self-Balanced Robot Using Proteus Design Tool and Arduino-UnoDocument8 pagesDesign and Implementation of Self-Balanced Robot Using Proteus Design Tool and Arduino-UnoSuresh MehtaNo ratings yet
- A Mechatronics Approach To Legged Locomotion: Victor Ragusila and M. Reza EmamiDocument6 pagesA Mechatronics Approach To Legged Locomotion: Victor Ragusila and M. Reza EmamiSebastianTamayoNo ratings yet
- Development of A Low-Cost Flexible Modular Robot GZ-IDocument6 pagesDevelopment of A Low-Cost Flexible Modular Robot GZ-IJuan Gonzalez Gomez100% (2)
- Design and Aplication of A 3DOF Bionic Robot ArmDocument6 pagesDesign and Aplication of A 3DOF Bionic Robot ArmWairy Dias CardosoNo ratings yet
- Design and Robust Control of A 2 Dofs Lower Limb ExoskeletonDocument6 pagesDesign and Robust Control of A 2 Dofs Lower Limb ExoskeletonsofiiiNo ratings yet
- Dynamic of Two Wheeled RobotDocument35 pagesDynamic of Two Wheeled RobotMartino Ojwok AjangnayNo ratings yet
- EEE 1207 021 6 DOF Robotic Arm ManipulatorDocument7 pagesEEE 1207 021 6 DOF Robotic Arm ManipulatorCarlos Rodriguez RNo ratings yet
- Robotic ArmDocument9 pagesRobotic ArmRohit KumarNo ratings yet
- Design of a Planar Robotic Machine for Neuro-rehabilitationDocument7 pagesDesign of a Planar Robotic Machine for Neuro-rehabilitationlabsoneducationNo ratings yet
- AN044 Robotic ArmDocument9 pagesAN044 Robotic Armhussien amare100% (1)
- Soft Robotics Fabrication MethodsDocument19 pagesSoft Robotics Fabrication MethodsXhoniNo ratings yet
- Mobile Robot RefDocument25 pagesMobile Robot Refchoc_ngoayNo ratings yet
- Modeling and controlling a 6-DOF robotic armDocument8 pagesModeling and controlling a 6-DOF robotic armBijay KumarNo ratings yet
- Behaviour Based Control in The Microrobotics: Ádám Helybély András LassóDocument4 pagesBehaviour Based Control in The Microrobotics: Ádám Helybély András LassóManobhiram VenkataNo ratings yet
- Robotics: A Comparison of Robot Wrist Implementations For The Icub HumanoidDocument16 pagesRobotics: A Comparison of Robot Wrist Implementations For The Icub HumanoidJonatan VelasquezNo ratings yet
- A 01 Front MatterDocument3 pagesA 01 Front MatterenriqueholgadoNo ratings yet
- Robotic Arm: Electronic & CommunicationDocument16 pagesRobotic Arm: Electronic & CommunicationDilipsinh DodiyaNo ratings yet
- Smart-Structures Technology For Parallel RobotsDocument28 pagesSmart-Structures Technology For Parallel RobotsYazdan RastegarNo ratings yet
- Evolvable Mechanics Hardware Tools For Evolutionary RoboticsDocument7 pagesEvolvable Mechanics Hardware Tools For Evolutionary Roboticsdinu petreNo ratings yet
- Paper ControlDocument8 pagesPaper ControlAndree CrNo ratings yet
- Advances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFrom EverandAdvances in Motion Sensing and Control for Robotic Applications: Selected Papers from the Symposium on Mechatronics, Robotics, and Control (SMRC’18)- CSME International Congress 2018, May 27-30, 2018 Toronto, CanadaFarrokh Janabi-SharifiNo ratings yet
- Design and Operation of Human Locomotion SystemsFrom EverandDesign and Operation of Human Locomotion SystemsMarco CecarelliNo ratings yet
- ChE 441 Problem Set 2 SolutionsDocument11 pagesChE 441 Problem Set 2 Solutionsไตเติ้ล สบม.No ratings yet
- Transformer: Iftikhar Reza Contact: 01715 591 542Document64 pagesTransformer: Iftikhar Reza Contact: 01715 591 542Sanjid ElahiNo ratings yet
- Armature Reaction EffectsDocument4 pagesArmature Reaction EffectsnjnvsrNo ratings yet
- Rotor Shorted Turns - Detection and DiagnosticsDocument10 pagesRotor Shorted Turns - Detection and Diagnosticswaqas mahmoodNo ratings yet
- Ijet V3i3p18Document7 pagesIjet V3i3p18International Journal of Engineering and TechniquesNo ratings yet
- Sound Insulation TheoryDocument2 pagesSound Insulation TheorySarinNo ratings yet
- Deformation Notes PDF FreeDocument6 pagesDeformation Notes PDF FreeHussain FaisalNo ratings yet
- Alison Electrical CourseDocument33 pagesAlison Electrical CourseJulius Ecomu0% (1)
- Cambridge International AS & A Level: Physics 9702/12Document24 pagesCambridge International AS & A Level: Physics 9702/12Pham Thanh MinhNo ratings yet
- ANALYSING SERIES AND PARALLEL CIRCUITSDocument8 pagesANALYSING SERIES AND PARALLEL CIRCUITSTam Siew ShongNo ratings yet
- Electrical Symbols & Electronic SymbolsDocument17 pagesElectrical Symbols & Electronic SymbolsMuhammad SajedNo ratings yet
- Equilibrium of Force SystemDocument129 pagesEquilibrium of Force SystemSaptarshiDuttaNo ratings yet
- Draft 2 (Chapter 1 & 2 - Adam & Azam)Document5 pagesDraft 2 (Chapter 1 & 2 - Adam & Azam)NADZIRUL NAIM HAYADINNo ratings yet
- Assignment AASTUDocument6 pagesAssignment AASTUfiraol temesgenNo ratings yet
- 100va TXR Leaflet Dec2020Document1 page100va TXR Leaflet Dec2020msbhasinNo ratings yet
- Very Simple 9v Tesla Coil - Instructables PDFDocument16 pagesVery Simple 9v Tesla Coil - Instructables PDFpolikarpaNo ratings yet
- GR 12 Physical Sciences P1 MemoDocument15 pagesGR 12 Physical Sciences P1 MemoThemba SathekgeNo ratings yet
- Quizizz CHAPTER 2 FORCE AND MOTION KSSM Class ResultsDocument68 pagesQuizizz CHAPTER 2 FORCE AND MOTION KSSM Class Resultsfillyana01No ratings yet
- PPTDocument24 pagesPPTsvngreddyNo ratings yet
- Harmonic Analysis ParametersDocument15 pagesHarmonic Analysis ParametersNelson Augusto Contreras RojasNo ratings yet
- Scilab Textbook Companion For Antenna and Wave PropagationDocument176 pagesScilab Textbook Companion For Antenna and Wave PropagationTaherMontadarNo ratings yet
- Power Electronics Devices and Applications GuideDocument12 pagesPower Electronics Devices and Applications GuideOhanyelu Okeoma DanielNo ratings yet
- Stress AnalysisDocument249 pagesStress Analysisvikrantgulhane100% (2)
- DB Reg SK GBDocument2 pagesDB Reg SK GBABDELLAHABDELLAH2010No ratings yet
- Questions & Answers On Synchronous MotorsDocument28 pagesQuestions & Answers On Synchronous Motorskibrom atsbha100% (1)
- SRM Univ EEE Dept Exam SeatingDocument104 pagesSRM Univ EEE Dept Exam SeatingKanakaraj P PkrajNo ratings yet
- TMP-712 Presentation - Farm Machinery DyamicsDocument70 pagesTMP-712 Presentation - Farm Machinery DyamicsVishnu Ji AwasthiNo ratings yet
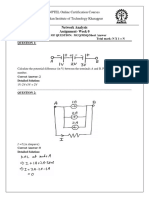
- NPTEL Online Certification Courses Indian Institute of Technology KharagpurDocument8 pagesNPTEL Online Certification Courses Indian Institute of Technology KharagpurABHISHEK GAUTAMNo ratings yet