You might also like
- ATI TEAS Calculation Workbook: 300 Questions to Prepare for the TEAS (2023 Edition)From EverandATI TEAS Calculation Workbook: 300 Questions to Prepare for the TEAS (2023 Edition)No ratings yet
- Harvard Formatting Style Guide PDFDocument13 pagesHarvard Formatting Style Guide PDFAhmed Gouda100% (1)
- Introductory College Mathematics: with Linear Algebra and Finite MathematicsFrom EverandIntroductory College Mathematics: with Linear Algebra and Finite MathematicsRating: 1 out of 5 stars1/5 (1)
- Overvieww of AIM Methodology OracleDocument3 pagesOvervieww of AIM Methodology OracletsurendarNo ratings yet
- Decision Science - MCQDocument36 pagesDecision Science - MCQpritesh0% (1)
- Seminary Guide For Research and WritingDocument43 pagesSeminary Guide For Research and WritingAhmed GoudaNo ratings yet
- Scientific Style and Format: The CSE Manual For Authors, Editors, and Publishers, 7thDocument2 pagesScientific Style and Format: The CSE Manual For Authors, Editors, and Publishers, 7thAhmed GoudaNo ratings yet
- Windows Forms Programming in C# 2003Document582 pagesWindows Forms Programming in C# 2003Anabel MaldonadoNo ratings yet
- Cjob TutorialDocument28 pagesCjob TutorialCelia ThomasNo ratings yet
- Ans 7Document3 pagesAns 7Md Shakir AlamNo ratings yet
- Exam 1997 98Document24 pagesExam 1997 98Ahmed GoudaNo ratings yet
- G5AIAI (Introduction To Artificial Intelligence) Examination 2001/02Document28 pagesG5AIAI (Introduction To Artificial Intelligence) Examination 2001/02Travis DannyNo ratings yet
- G5AIAI - Introduction To AI Exam 2002/2003: The Rubric For This Examination Should Read As FollowsDocument29 pagesG5AIAI - Introduction To AI Exam 2002/2003: The Rubric For This Examination Should Read As FollowsTravis DannyNo ratings yet
- Assignment No 1-2010Document7 pagesAssignment No 1-2010Ganesh Aiyer100% (1)
- Computer Based Optimization Methods MC0079Document25 pagesComputer Based Optimization Methods MC0079Tanmay MajumderNo ratings yet
- CPT212-Test2-2023 SolutionDocument6 pagesCPT212-Test2-2023 Solutionweimin chooNo ratings yet
- MPM2 DExam ReviewDocument20 pagesMPM2 DExam Reviewdilfmilfslayer69No ratings yet
- Postgraduate PG Mba Semester 3 2023 May Decision Science Pattern 2019Document4 pagesPostgraduate PG Mba Semester 3 2023 May Decision Science Pattern 2019Tushar ChaudhariNo ratings yet
- Or 1Document4 pagesOr 1Arun SahaniNo ratings yet
- CSE629 Robotics 2017 FinalSolutionDocument9 pagesCSE629 Robotics 2017 FinalSolutionNioNo ratings yet
- DAA UNIT 1 - FinalDocument38 pagesDAA UNIT 1 - FinalkarthickamsecNo ratings yet
- DSA - Answer KeyDocument3 pagesDSA - Answer Keysouvik samantaNo ratings yet
- MENG 310 EXAM 01 Spring 2013Document8 pagesMENG 310 EXAM 01 Spring 2013Abdulrahman AlzahraniNo ratings yet
- VII Semester B. Tech (Computer Engineering) ...... 2016-17 Subject: Artificial Intelligence Paper Code ... Co 401Document6 pagesVII Semester B. Tech (Computer Engineering) ...... 2016-17 Subject: Artificial Intelligence Paper Code ... Co 401kpNo ratings yet
- Operations Research Summer 2019Document2 pagesOperations Research Summer 2019Diksha PatilNo ratings yet
- Algorithms - Exam 2021-2022 Model AnswerDocument4 pagesAlgorithms - Exam 2021-2022 Model AnswerAhmed MabrokNo ratings yet
- r7410301 Operations ResearchDocument5 pagesr7410301 Operations ResearchsivabharathamurthyNo ratings yet
- Fybsc-It Sem1 de Apr19Document2 pagesFybsc-It Sem1 de Apr19faiyaz pardiwalaNo ratings yet
- Digital Circuits and Logic DesignDocument6 pagesDigital Circuits and Logic DesignSharukh BujjiNo ratings yet
- Indian Engineering OlympiadDocument9 pagesIndian Engineering OlympiadArjun JainNo ratings yet
- DigitalDocument2 pagesDigitalSahil SharmaNo ratings yet
- EE09 L02 Numerical Analysis and Optimisation Techniques APR 2014Document6 pagesEE09 L02 Numerical Analysis and Optimisation Techniques APR 2014Sai DasNo ratings yet
- Binomial Theorem - Practice SheetDocument3 pagesBinomial Theorem - Practice Sheetsameeryad72No ratings yet
- Gujarat Technological UniversityDocument3 pagesGujarat Technological UniversityKALPESH MALINo ratings yet
- Marketing ManagementDocument4 pagesMarketing ManagementAnonymous WtjVcZCgNo ratings yet
- 2014 Trial General Mathematics Year 11 Paper PDFDocument26 pages2014 Trial General Mathematics Year 11 Paper PDFYon Seo Yoo100% (1)
- Diagnostic Test GMAT (73 Questions and Solutions)Document117 pagesDiagnostic Test GMAT (73 Questions and Solutions)RijulNo ratings yet
- UNIT WISE QUEST DIGITAL LOGIC DESIGN - GIET 2019 II - I (3rd Sem)Document18 pagesUNIT WISE QUEST DIGITAL LOGIC DESIGN - GIET 2019 II - I (3rd Sem)Deepak NaiduNo ratings yet
- Assignment Set DDocument5 pagesAssignment Set DPutri Balqis binti DaudNo ratings yet
- Assignment - NP-Completeness and Heuristic AlgorithmsDocument2 pagesAssignment - NP-Completeness and Heuristic AlgorithmsJuan Jose PerezNo ratings yet
- Answer All QuestionsDocument3 pagesAnswer All QuestionsDisha KothariNo ratings yet
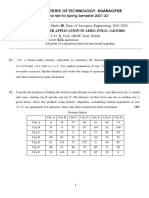
- Exam2 - AE31006 - 2021 - 2022Document1 pageExam2 - AE31006 - 2021 - 2022Chetan GowdaNo ratings yet
- Chapter 10. Dynamic Programming: Min Soo KIMDocument26 pagesChapter 10. Dynamic Programming: Min Soo KIMdbNo ratings yet
- PMD2HDocument6 pagesPMD2HAnonymous WtjVcZCgNo ratings yet
- Btech Ece 8 Sem Digital Image Processing 2011Document7 pagesBtech Ece 8 Sem Digital Image Processing 2011Abhijit DasNo ratings yet
- ME GATE 2017 Set I Key SolutionDocument25 pagesME GATE 2017 Set I Key SolutionBeesam Ramesh KumarNo ratings yet
- Homework ThreeDocument4 pagesHomework ThreeAnuj JainNo ratings yet
- Functions: Dr. Ahmed Hassan 01117658521Document17 pagesFunctions: Dr. Ahmed Hassan 01117658521Soha WalidNo ratings yet
- Seemester Exam 2017-18 - 2521Document2 pagesSeemester Exam 2017-18 - 2521Arjun SinghNo ratings yet
- Homework #1: 2.087 Differential Equations and Linear Algebra, Spring 2014Document3 pagesHomework #1: 2.087 Differential Equations and Linear Algebra, Spring 2014Omar SaeedNo ratings yet
- ME - 2017 Set I Key Solution11Document25 pagesME - 2017 Set I Key Solution11UTKARSH SHARMANo ratings yet
- 2018 OE (CS) 802D Operation ResearchDocument5 pages2018 OE (CS) 802D Operation Researchvmandal.cr7No ratings yet
- sm2 - 11.1-11.4 - HW - Review 2Document5 pagessm2 - 11.1-11.4 - HW - Review 2rileyNo ratings yet
- Btech Cs 5 Sem Computer Graphics kcs053 2023Document2 pagesBtech Cs 5 Sem Computer Graphics kcs053 2023Divyansh GoelNo ratings yet
- MCQ, Design and Analysis of AlgorithmDocument19 pagesMCQ, Design and Analysis of AlgorithmSK DUDE100% (1)
- 10th Class Quiz 27-06-2021 Q.PDocument9 pages10th Class Quiz 27-06-2021 Q.PSurya RaoNo ratings yet
- 10) There Are 4 Lines: A) 4y+5x 3 B) 3y+3x 7 C) y 7x+2 D) 5y 4x+9Document2 pages10) There Are 4 Lines: A) 4y+5x 3 B) 3y+3x 7 C) y 7x+2 D) 5y 4x+9Rohit TirkeyNo ratings yet
- 7.CE GATE 2016 Set 1Document29 pages7.CE GATE 2016 Set 1saithejaNo ratings yet
- MidTermExam CADCAM2019 FFDocument6 pagesMidTermExam CADCAM2019 FFkhalil alhatabNo ratings yet
- Operation Relation AssignmentDocument1 pageOperation Relation Assignmentcijane9998No ratings yet
- 1 Question Bank Aptitude Test #2Document3 pages1 Question Bank Aptitude Test #2api-19983843No ratings yet
- Business Statistics and Anaylitics (pUT)Document4 pagesBusiness Statistics and Anaylitics (pUT)ashraf hussainNo ratings yet
- Hidden Line Removal: Unveiling the Invisible: Secrets of Computer VisionFrom EverandHidden Line Removal: Unveiling the Invisible: Secrets of Computer VisionNo ratings yet
- Sugars and SweetenersDocument9 pagesSugars and SweetenersAhmed GoudaNo ratings yet
- Library Guide CSE StyleDocument3 pagesLibrary Guide CSE StyleRalfNo ratings yet
- DMEC 2209 22012 MDocument6 pagesDMEC 2209 22012 MAhmed GoudaNo ratings yet
- Answer Sheet: University of Palestine Nursing Diploma ProgramDocument8 pagesAnswer Sheet: University of Palestine Nursing Diploma ProgramAhmed GoudaNo ratings yet
- Marks 5 Question One: Choose The Correct Answer: Nutrition For Health ProfessionsDocument3 pagesMarks 5 Question One: Choose The Correct Answer: Nutrition For Health ProfessionsAhmed GoudaNo ratings yet
- Maltodextrins: Supporting Specialised NutritionDocument6 pagesMaltodextrins: Supporting Specialised NutritionAhmed GoudaNo ratings yet
- Question One: Choose The Correct 10 Marks: Nutrition For Health ProfessionsDocument2 pagesQuestion One: Choose The Correct 10 Marks: Nutrition For Health ProfessionsAhmed GoudaNo ratings yet
- 40 Marks Question One: Choose The Most Appropriate Answer: Nutrition For Health ProfessionsDocument4 pages40 Marks Question One: Choose The Most Appropriate Answer: Nutrition For Health ProfessionsAhmed GoudaNo ratings yet
- Bibliographic Citations APA 6th Harvard Feb14Document30 pagesBibliographic Citations APA 6th Harvard Feb14Ahmed GoudaNo ratings yet
- The Research Paper: MLA Style: Examples For The List of "Works Cited" and In-Text CitationDocument4 pagesThe Research Paper: MLA Style: Examples For The List of "Works Cited" and In-Text CitationAhmed GoudaNo ratings yet
- CseDocument2 pagesCseAhmed GoudaNo ratings yet
- Appendix A: Cost Optimization of Structures: Fuzzy Logic, Genetic Algorithms, and Parallel Computing H. Adeli andDocument3 pagesAppendix A: Cost Optimization of Structures: Fuzzy Logic, Genetic Algorithms, and Parallel Computing H. Adeli andAhmed GoudaNo ratings yet
- CSE 8th Edition August 2016Document7 pagesCSE 8th Edition August 2016Ahmed GoudaNo ratings yet
- How To Write A Great Research Paper: Jon TurnerDocument9 pagesHow To Write A Great Research Paper: Jon TurnerAhmed GoudaNo ratings yet
- Genetic Programming: Examples and Theory: Natural ComputingDocument24 pagesGenetic Programming: Examples and Theory: Natural ComputingAhmed GoudaNo ratings yet
- Sample APA Paper PDFDocument5 pagesSample APA Paper PDFAhmed GoudaNo ratings yet
- Sample APA Paper PDFDocument5 pagesSample APA Paper PDFAhmed GoudaNo ratings yet
- Lecture - 12 Von Neumann & Morgenstern Expected UtilityDocument20 pagesLecture - 12 Von Neumann & Morgenstern Expected UtilityAhmed GoudaNo ratings yet
- Lecture - 14 Expected Utility Over Money and ApplicationsDocument19 pagesLecture - 14 Expected Utility Over Money and ApplicationsAhmed GoudaNo ratings yet
- Lecture - 13 Anscombe & Aumann Expected UtilityDocument20 pagesLecture - 13 Anscombe & Aumann Expected UtilityAhmed Gouda100% (1)
- COMP 202 Midterm ReviewDocument26 pagesCOMP 202 Midterm ReviewMohand KhouiderNo ratings yet
- MCO 2015 Problems & SolutionsDocument36 pagesMCO 2015 Problems & SolutionsYing Xuan EngNo ratings yet
- Streamline Configuration Management With The Barcode Scanner ModuleDocument3 pagesStreamline Configuration Management With The Barcode Scanner ModuleTOPdeskNo ratings yet
- Mouse Programming in CDocument18 pagesMouse Programming in CNavpreetSinghDhunnaNo ratings yet
- Cs507 Quiz Solved #2Document18 pagesCs507 Quiz Solved #2Power GirlsNo ratings yet
- VERITAS Storage Foundation For WindowsDocument6 pagesVERITAS Storage Foundation For WindowsParanthaman NatesanNo ratings yet
- Operating System McqsDocument6 pagesOperating System McqsFayaz WaniNo ratings yet
- Seth TaylorDocument2 pagesSeth Taylorseth_taylor269859No ratings yet
- ISACA Glossary English Portuguese PDFDocument62 pagesISACA Glossary English Portuguese PDFBrunoOliveiraBastosNo ratings yet
- International Journal About Windows & LinuxDocument6 pagesInternational Journal About Windows & LinuxDimas Renaldi AngkawijayaNo ratings yet
- What Is ODBCDocument95 pagesWhat Is ODBCNitin PandeyNo ratings yet
- Smart MirrorDocument12 pagesSmart MirrorDaman Deep Singh ArnejaNo ratings yet
- MongoDB Projection PDFDocument3 pagesMongoDB Projection PDFRahul SinghNo ratings yet
- Eda PlaygroundDocument31 pagesEda PlaygroundMohammad Seemab AslamNo ratings yet
- Assignment OODJDocument6 pagesAssignment OODJKushanedra ShanmugalingamNo ratings yet
- CSC 330Document3 pagesCSC 330dr_digitalNo ratings yet
- 100 Things You Should Know About ABAP WorkbenchDocument6 pages100 Things You Should Know About ABAP WorkbenchDaniel Lai0% (1)
- Cosmic - Cruise System Final - MinhasDocument26 pagesCosmic - Cruise System Final - Minhasdann_991No ratings yet
- PLSQL Section 1-10Document14 pagesPLSQL Section 1-10Abdalah HusaeniNo ratings yet
- Guide 2: From Around Nov 2009: Edit: Don't Use This Guide Anymore!Document5 pagesGuide 2: From Around Nov 2009: Edit: Don't Use This Guide Anymore!Mierdadepollo DecagadaNo ratings yet
- Datasheet DsPICDocument249 pagesDatasheet DsPICdola81No ratings yet
- Structural Data Types: Wire and RegDocument25 pagesStructural Data Types: Wire and RegRAGUL RAJ SNo ratings yet
- Web Paper AnswersDocument8 pagesWeb Paper AnswersAsweerNo ratings yet
- IsaiahmwauraCV PDFDocument3 pagesIsaiahmwauraCV PDFIsaiah Mwaura KaguraniNo ratings yet
- Applies To:: FAQ: Account Generator (Doc ID 216831.1)Document4 pagesApplies To:: FAQ: Account Generator (Doc ID 216831.1)zelghorfNo ratings yet
- Script To Know Apps Sysadmin PasswordDocument3 pagesScript To Know Apps Sysadmin Passwordhole_kuNo ratings yet
- Acronyms A4 Duplex PDFDocument179 pagesAcronyms A4 Duplex PDFsentimental37No ratings yet