You might also like
- Computer Vision For Visual EffectsDocument410 pagesComputer Vision For Visual Effectsfyan.3391100% (3)
- Underwater Image EnhancementDocument26 pagesUnderwater Image EnhancementVarsha Rani100% (3)
- Ultimate Field Guide To PhotographyDocument23 pagesUltimate Field Guide To PhotographyIulian Oprea100% (1)
- Book Texturing in Substance Painter.Document13 pagesBook Texturing in Substance Painter.Jasmine Masters100% (2)
- Deep Learning-Based Welding Image Recognition: A Comprehensive ReviewDocument26 pagesDeep Learning-Based Welding Image Recognition: A Comprehensive Reviewsay dalilaNo ratings yet
- Presentation On Brain Tumor DetectionDocument23 pagesPresentation On Brain Tumor DetectionVekariya DarshanaNo ratings yet
- NeroquantologyDocument7 pagesNeroquantologykumshubham9870No ratings yet
- Multi-Scale Fusion For Underwater Image Enhancement Using Multi-Layer PerceptronDocument9 pagesMulti-Scale Fusion For Underwater Image Enhancement Using Multi-Layer PerceptronIAES IJAINo ratings yet
- Underwater Optical Image Dehazing Using Fast Guided Trigonometric Bilateral FilteringDocument4 pagesUnderwater Optical Image Dehazing Using Fast Guided Trigonometric Bilateral FilteringerpublicationNo ratings yet
- Underwater Image Enhancement Based On Red ChannelDocument10 pagesUnderwater Image Enhancement Based On Red ChannelMustafa Kemal AmbarNo ratings yet
- A Deep CNN Method For Underwater Image EnhancementDocument5 pagesA Deep CNN Method For Underwater Image EnhancementSepta CahyaniNo ratings yet
- Multi-purpose method enhances underwater imagesDocument13 pagesMulti-purpose method enhances underwater imagesSepta CahyaniNo ratings yet
- Water Image Enhancement Using RetinalDocument15 pagesWater Image Enhancement Using Retinalsushmitha vNo ratings yet
- Computational Imaging For VLBI Image ReconstructionDocument10 pagesComputational Imaging For VLBI Image ReconstructionStalino NegroNo ratings yet
- v1 PDFDocument16 pagesv1 PDFmayank tiwariNo ratings yet
- 14Document5 pages14Themozhi JawaharNo ratings yet
- Improved Dark Channel Prior For Image Defogging Using RGB and Ycbcr Color SpaceDocument13 pagesImproved Dark Channel Prior For Image Defogging Using RGB and Ycbcr Color SpaceImran FareedNo ratings yet
- Clear Underwater VisionDocument8 pagesClear Underwater Vision孟老五No ratings yet
- Watergan: Unsupervised Generative Network To Enable Real-Time Color Correction of Monocular Underwater ImagesDocument8 pagesWatergan: Unsupervised Generative Network To Enable Real-Time Color Correction of Monocular Underwater ImagesWafa BenzaouiNo ratings yet
- Chongyi Li, Jichang Guo, Yanwei Pang, Shanji Chen, Jian WangDocument5 pagesChongyi Li, Jichang Guo, Yanwei Pang, Shanji Chen, Jian WangMega DigitalNo ratings yet
- Color Correction and Local Contrast Enhancement For Underwater Image EnhancementDocument13 pagesColor Correction and Local Contrast Enhancement For Underwater Image Enhancementaslakshmi153No ratings yet
- Color Balance and Fusion For Underwater Image EnhancementDocument15 pagesColor Balance and Fusion For Underwater Image EnhancementWafa BenzaouiNo ratings yet
- Color Balance and Fusion For Underwater Image EnhancementDocument15 pagesColor Balance and Fusion For Underwater Image EnhancementKiran KKKNo ratings yet
- Symmetry: Underwater Image Enhancement Using Successive Color Correction and Superpixel Dark Channel PriorDocument18 pagesSymmetry: Underwater Image Enhancement Using Successive Color Correction and Superpixel Dark Channel PriorS. LAVANYANo ratings yet
- YyyyDocument13 pagesYyyycodelover0007No ratings yet
- Underwater Image Enhancement by Gaussian Curvature FilterDocument5 pagesUnderwater Image Enhancement by Gaussian Curvature FiltermausamNo ratings yet
- Underwater Single Image Restoration Using CycleganDocument16 pagesUnderwater Single Image Restoration Using Cyclegancodelover0007No ratings yet
- Color Correction Research SeminarDocument36 pagesColor Correction Research SeminarAbhinaya SrivastavaNo ratings yet
- Eric Bruneton - Real-Time Realistic Ocean LightingDocument10 pagesEric Bruneton - Real-Time Realistic Ocean LightingEmmanuel RocheNo ratings yet
- Underwater Image Enhancement Using A Multiscale Dense Generative Adversarial NetworkDocument9 pagesUnderwater Image Enhancement Using A Multiscale Dense Generative Adversarial Networkramesh reddyNo ratings yet
- Remote Sensing: Guidelines For Underwater Image Enhancement Based On Benchmarking of Different MethodsDocument27 pagesRemote Sensing: Guidelines For Underwater Image Enhancement Based On Benchmarking of Different Methodspuja 382No ratings yet
- Underwater Image Enhancement by Wavelet Decomposition Using FpgaDocument5 pagesUnderwater Image Enhancement by Wavelet Decomposition Using FpgaAishwarya AishwaryaNo ratings yet
- Caustics Mapping: An Image-Space Technique For Real-Time CausticsDocument8 pagesCaustics Mapping: An Image-Space Technique For Real-Time CausticsMarkNo ratings yet
- Underwater Image Restoration and Enhancement Based On A Fusion Algorithm With Color Balance Contrast Optimization and Histogram StretchingDocument13 pagesUnderwater Image Restoration and Enhancement Based On A Fusion Algorithm With Color Balance Contrast Optimization and Histogram Stretchingsnet solutionsNo ratings yet
- Initial Results in Underwater Single Image Dehazing: Nicholas Carlevaris-Bianco, Anush Mohan, Ryan M. EusticeDocument8 pagesInitial Results in Underwater Single Image Dehazing: Nicholas Carlevaris-Bianco, Anush Mohan, Ryan M. EusticeanaqiaisyahNo ratings yet
- Realistic Water Volumes in Real-TimeDocument8 pagesRealistic Water Volumes in Real-TimeefreetteNo ratings yet
- Contour Based Reconstruction of Underwater Structures Using Sonar Visual Inertial and Depth SensorDocument6 pagesContour Based Reconstruction of Underwater Structures Using Sonar Visual Inertial and Depth SensorGuilherme OliveiraNo ratings yet
- Underwater Single Image Color Restoration Using Haze-Lines and A New Quantitative DatasetDocument14 pagesUnderwater Single Image Color Restoration Using Haze-Lines and A New Quantitative DatasetSepta CahyaniNo ratings yet
- 1906 OceanDark 31次Document24 pages1906 OceanDark 31次Alex StrangeNo ratings yet
- Enhancement of Underwater Images by Image Fusion Using Wavelet DecompositionDocument5 pagesEnhancement of Underwater Images by Image Fusion Using Wavelet DecompositionijsretNo ratings yet
- Zhou Breaking Through The Haze An Advanced Non-Homogeneous Dehazing Method Based CVPRW 2023 PaperDocument10 pagesZhou Breaking Through The Haze An Advanced Non-Homogeneous Dehazing Method Based CVPRW 2023 Paperlohithinfinite154No ratings yet
- 2203 04822Document18 pages2203 04822Mustafa Kemal AmbarNo ratings yet
- Real-Time Monocular Depth Estimation using Synthetic DataDocument11 pagesReal-Time Monocular Depth Estimation using Synthetic DataRob ZelNo ratings yet
- Multi-Focus Image Fusion For Extended Depth of Field: Wisarut Chantara and Yo-Sung HoDocument4 pagesMulti-Focus Image Fusion For Extended Depth of Field: Wisarut Chantara and Yo-Sung Hofiza ashfaqNo ratings yet
- REF 5 Lxy - IEEE-2010Document9 pagesREF 5 Lxy - IEEE-2010subhasaranya259No ratings yet
- (Yu2018) Haze Removal Algorithm Using Color Attenuation Prior and Guided FilterDocument5 pages(Yu2018) Haze Removal Algorithm Using Color Attenuation Prior and Guided FilterK SavitriNo ratings yet
- Enhancement of Cloud-Associated Shadow Areas in Satellite Images Using Wavelet Image FusionDocument8 pagesEnhancement of Cloud-Associated Shadow Areas in Satellite Images Using Wavelet Image FusionDeepa RameshNo ratings yet
- Seminar Report (Chiranjivi)Document22 pagesSeminar Report (Chiranjivi)ShashiKumar100% (1)
- Atapour-Abarghouei Veritatem Dies Aperit - Temporally Consistent Depth Prediction Enabled by CVPR 2019 Paper PDFDocument12 pagesAtapour-Abarghouei Veritatem Dies Aperit - Temporally Consistent Depth Prediction Enabled by CVPR 2019 Paper PDFRob ZelNo ratings yet
- Unsupervised Single Image Dehazing Using DarkDocument8 pagesUnsupervised Single Image Dehazing Using DarkAnsuman MahantyNo ratings yet
- Colour Enhancment PaperDocument24 pagesColour Enhancment PaperVishnu YadavalliNo ratings yet
- Under Water Image Enhancement Using Discrete Cosine TransformDocument4 pagesUnder Water Image Enhancement Using Discrete Cosine Transformanil kasotNo ratings yet
- Single Image Dehazing Using Saturation Line PriorDocument16 pagesSingle Image Dehazing Using Saturation Line PriorsrinivasNo ratings yet
- In PaintingDocument6 pagesIn PaintingnugrohoNo ratings yet
- 1 s2.0 S0165168422001979 MainDocument14 pages1 s2.0 S0165168422001979 MainFlying AVANo ratings yet
- Li Depth and Surface 2015 CVPR PaperDocument9 pagesLi Depth and Surface 2015 CVPR PaperMNo ratings yet
- Smart and Real Time Image Dehazing On Mobile DevicDocument8 pagesSmart and Real Time Image Dehazing On Mobile Devicsubhasaranya259No ratings yet
- Base PaperDocument6 pagesBase Paperwa5jeedNo ratings yet
- Li Lets See Clearly Contaminant Artifact Removal For Moving Cameras ICCV 2021 PaperDocument10 pagesLi Lets See Clearly Contaminant Artifact Removal For Moving Cameras ICCV 2021 PaperPS InnovationsNo ratings yet
- Single Image Dehazing Using A Multilayer PerceptronDocument12 pagesSingle Image Dehazing Using A Multilayer PerceptronkumarahladNo ratings yet
- ACM Submission Underwater Image RestorationDocument13 pagesACM Submission Underwater Image RestorationKarim KarimaNo ratings yet
- A Review On Video and Image Defogging Algorithms Image Restoration EnhancementDocument4 pagesA Review On Video and Image Defogging Algorithms Image Restoration EnhancementerpublicationNo ratings yet
- Dyadic Integer CoefficientsDocument7 pagesDyadic Integer CoefficientsHymaNo ratings yet
- Standard and Super-Resolution Bioimaging Data Analysis: A PrimerFrom EverandStandard and Super-Resolution Bioimaging Data Analysis: A PrimerNo ratings yet
- Civilization 3 - ManualDocument243 pagesCivilization 3 - ManualGarrete Alves ReisNo ratings yet
- How To Set Up Photography Lighting For A Home Studio by Amber Richards PDFDocument82 pagesHow To Set Up Photography Lighting For A Home Studio by Amber Richards PDFHarold Giraldo100% (1)
- Civilization 3 - ManualDocument243 pagesCivilization 3 - ManualGarrete Alves ReisNo ratings yet
- Lista de Códigos de ErrosDocument20 pagesLista de Códigos de ErrosGarrete Alves ReisNo ratings yet
- ReadmeDocument2 pagesReadmeGarrete Alves ReisNo ratings yet
- DX DiagDocument35 pagesDX DiagGarrete Alves ReisNo ratings yet
- Lista de Códigos de ErrosDocument20 pagesLista de Códigos de ErrosGarrete Alves ReisNo ratings yet
- Assettypes CommonDocument24 pagesAssettypes CommonsmulkamaksNo ratings yet
- Brochure DTU-AUV - 230607 - 230138Document26 pagesBrochure DTU-AUV - 230607 - 230138Ishpreet SinghNo ratings yet
- Geometry of Aerial PhotographDocument4 pagesGeometry of Aerial Photographksama3964No ratings yet
- Precise Depth Image Based Real-Time 3D Difference DetectionDocument154 pagesPrecise Depth Image Based Real-Time 3D Difference DetectionMihai TudoseNo ratings yet
- A Survey On Gesture Pattern Recognition For Mute PeoplesDocument5 pagesA Survey On Gesture Pattern Recognition For Mute PeoplesRahul SharmaNo ratings yet
- Unit 3Document14 pagesUnit 3Sumit SinghaniaNo ratings yet
- Digital Image Processing HW5Document5 pagesDigital Image Processing HW5Debjyoti PaulNo ratings yet
- Traffic Light Detection and Recognition For Self Driving Cars Using Deep Learning SurveyDocument4 pagesTraffic Light Detection and Recognition For Self Driving Cars Using Deep Learning SurveyEditor IJTSRDNo ratings yet
- Computer Science - BotPro Case Study (May 2024)Document21 pagesComputer Science - BotPro Case Study (May 2024)Racshanyaa Jagadish100% (1)
- An Efficient Ball Detection Framework For CricketDocument6 pagesAn Efficient Ball Detection Framework For CricketIJCSI EditorNo ratings yet
- (CV) Combined S1Document251 pages(CV) Combined S1ahmadNo ratings yet
- A Prelimenery Report On Real Time Face Recognition Automatic Students Attendence ManagementDocument33 pagesA Prelimenery Report On Real Time Face Recognition Automatic Students Attendence ManagementAashutosh SharmaNo ratings yet
- Jy ThonDocument11 pagesJy ThonpfedorovNo ratings yet
- Tutorial Input Data Fu Untuk Processing Orthophoto Agisoft PhotoscanDocument10 pagesTutorial Input Data Fu Untuk Processing Orthophoto Agisoft PhotoscanEsdm geologikaltaraNo ratings yet
- A Dataset For Audio-Video Based Vehicle Speed Estimation: 1 Slobodan Djukanovi C 2 Nikola Bulatovi C 3 Ivana CavorDocument4 pagesA Dataset For Audio-Video Based Vehicle Speed Estimation: 1 Slobodan Djukanovi C 2 Nikola Bulatovi C 3 Ivana CavorIvana MilašNo ratings yet
- Medical Characteristics Identification of Leaf IEEE 2020Document5 pagesMedical Characteristics Identification of Leaf IEEE 2020Adithya s kNo ratings yet
- Jellypie 3D Box Shot Pro Software 4.4.0Document2 pagesJellypie 3D Box Shot Pro Software 4.4.0liehokgieNo ratings yet
- Facial Recognition Using OpenCVDocument7 pagesFacial Recognition Using OpenCVVishalKumarNo ratings yet
- Review of Graph, Medical and Color Image Base Segmentation TechniquesDocument67 pagesReview of Graph, Medical and Color Image Base Segmentation TechniquesFidel SouzaNo ratings yet
- Computer Graphics and Animation Course OutlineDocument10 pagesComputer Graphics and Animation Course Outlinekrq47127No ratings yet
- Final-Term Papers Solved MCQSDocument50 pagesFinal-Term Papers Solved MCQSEver GreenNo ratings yet
- PCTOCDocument35 pagesPCTOCPeñamante CarlosNo ratings yet
- Robotics Project Group ReportDocument7 pagesRobotics Project Group ReportnuzhatNo ratings yet
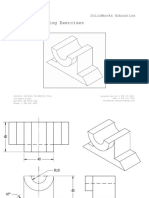
- Detailed Drawing Exercises: Solidworks EducationDocument51 pagesDetailed Drawing Exercises: Solidworks EducationlutherblackNo ratings yet
- Internship Presentation on Data AnalysisDocument20 pagesInternship Presentation on Data AnalysisChethan Reddy D RNo ratings yet