You might also like
- Characteristics of Flow Past A Symmetric Airfoil at Low ReynoldsDocument9 pagesCharacteristics of Flow Past A Symmetric Airfoil at Low Reynoldszhaojie qinNo ratings yet
- Modeling The Unsteady Aerodynamic Forces On SmallDocument15 pagesModeling The Unsteady Aerodynamic Forces On SmallFrkanNo ratings yet
- Flutter of Subsonic WingDocument11 pagesFlutter of Subsonic WingmamalilariNo ratings yet
- Dynamic Stall Analysis of s809 Pitching Airfoil in Unsteady Free Stream VelocityDocument9 pagesDynamic Stall Analysis of s809 Pitching Airfoil in Unsteady Free Stream VelocityKOMPELLA SAI RAM SASTRYNo ratings yet
- 20040129686Document18 pages20040129686Robert DaltonNo ratings yet
- İnceleDocument24 pagesİnceleMert BağrıyanıkNo ratings yet
- Computers & Fluids: M. Sergio Campobasso, Andreas Piskopakis, Jernej Drofelnik, Adrian JacksonDocument20 pagesComputers & Fluids: M. Sergio Campobasso, Andreas Piskopakis, Jernej Drofelnik, Adrian JacksonRomizNo ratings yet
- Wing Rock Phenomenon PDFDocument13 pagesWing Rock Phenomenon PDFChegrani AhmedNo ratings yet
- Aerodynamics - Part-2 - KrasnovDocument432 pagesAerodynamics - Part-2 - KrasnovJosé Luis Silva ManriquezNo ratings yet
- Helicopter Rotor Airloads Unsteady AerodynamicsDocument14 pagesHelicopter Rotor Airloads Unsteady AerodynamicsDaniel BackNo ratings yet
- 1 s2.0 S0889974606001253 MainDocument21 pages1 s2.0 S0889974606001253 Mainaysenurpektas97No ratings yet
- Modeling of Aerodynamic Flutter On A NACA 4412 Airfoil Wind Blade (Final)Document7 pagesModeling of Aerodynamic Flutter On A NACA 4412 Airfoil Wind Blade (Final)Alfa BetaNo ratings yet
- Euler and Quaternion Parameterization in VTOL UAVDocument5 pagesEuler and Quaternion Parameterization in VTOL UAVNoor DullaertNo ratings yet
- Hinglesss Rotor EOM ModelDocument9 pagesHinglesss Rotor EOM Modelhmalikn7581No ratings yet
- Chapter 1Document19 pagesChapter 1Krishna MyakalaNo ratings yet
- Aerodynamic Performance of Wind Turbine Airfoil DUDocument17 pagesAerodynamic Performance of Wind Turbine Airfoil DUSara RodriguezNo ratings yet
- Modeling Steady-State and Transient Forces On A Cylinder: 1.1 Literature SummaryDocument18 pagesModeling Steady-State and Transient Forces On A Cylinder: 1.1 Literature Summarymuhammad sufyanNo ratings yet
- 37 Pavlovskaia - Postnikov - CFD - CalibratedDocument15 pages37 Pavlovskaia - Postnikov - CFD - CalibratedNik FinNo ratings yet
- Euler and Quaternion ParameterizationDocument5 pagesEuler and Quaternion ParameterizationhugoNo ratings yet
- Simulation of Dynamic Stall For A NACA 0012 Airfoil Using A Vortex MethodDocument20 pagesSimulation of Dynamic Stall For A NACA 0012 Airfoil Using A Vortex MethodAli JavedNo ratings yet
- Numarical Investigation of Medium Range Re Number Aerodynamics Characteristics For NACA0018 AirfoilDocument14 pagesNumarical Investigation of Medium Range Re Number Aerodynamics Characteristics For NACA0018 AirfoilSeref UcarNo ratings yet
- Experimental and Numerical Analysis of Different Aerodynamic Properties of Circular CylinderDocument6 pagesExperimental and Numerical Analysis of Different Aerodynamic Properties of Circular Cylinderpramo_dassNo ratings yet
- Aerodynamics of Spin Stabilised MissilesDocument23 pagesAerodynamics of Spin Stabilised MissilesAries SattiNo ratings yet
- Numerical and Experimental Study of Swirling Flow in A Model CombustorDocument12 pagesNumerical and Experimental Study of Swirling Flow in A Model CombustorvelmuruganNo ratings yet
- CFDJ Stockdill Et Al 2006Document20 pagesCFDJ Stockdill Et Al 20061saeed9No ratings yet
- Low Order Modeling of Unsteady AerodDocument1 pageLow Order Modeling of Unsteady AerodAndrea JohnsonNo ratings yet
- Frequency Domain Unsteady Transonic Aerodynamics F PDFDocument9 pagesFrequency Domain Unsteady Transonic Aerodynamics F PDFZeeshan KhanNo ratings yet
- InTech-Autonomous Underwater Vehicle Propeller Simulation Using Computational Fluid DynamicDocument22 pagesInTech-Autonomous Underwater Vehicle Propeller Simulation Using Computational Fluid DynamicMol MolNo ratings yet
- 54 - RostamzadehDocument4 pages54 - RostamzadehRidwan FadlikaNo ratings yet
- Applied Mathematical Modelling: S.J. Karabelas, B.C. Koumroglou, C.D. Argyropoulos, N.C. MarkatosDocument20 pagesApplied Mathematical Modelling: S.J. Karabelas, B.C. Koumroglou, C.D. Argyropoulos, N.C. MarkatosNMarkatosNo ratings yet
- Random Vibration Analysis For Centrifugal Compressor Impellers With Unsteady Aerodynamic ExcitationsDocument8 pagesRandom Vibration Analysis For Centrifugal Compressor Impellers With Unsteady Aerodynamic ExcitationsAZZAF ChannelNo ratings yet
- A Hierarchy of Low-Dimensional Models For The Transient and Post-Transient Cylinder WakeDocument29 pagesA Hierarchy of Low-Dimensional Models For The Transient and Post-Transient Cylinder Wakesho bhaNo ratings yet
- Numerical Simulation of Aeroacoustical Noise From A Wing-Flap ConfigurationDocument7 pagesNumerical Simulation of Aeroacoustical Noise From A Wing-Flap ConfigurationtotoNo ratings yet
- Abdullah 2017 J. Phys. Conf. Ser. 914 012005Document8 pagesAbdullah 2017 J. Phys. Conf. Ser. 914 012005Mostafa TawfeekNo ratings yet
- Wind Energy - 2018 - Singapore Wala - A Beddoes Leishman Type Model With An Optimization Based Methodology and AirfoilDocument14 pagesWind Energy - 2018 - Singapore Wala - A Beddoes Leishman Type Model With An Optimization Based Methodology and AirfoilAbdulqadir Aziz Singapore WalaNo ratings yet
- Cold Flow Analysis of Trapped Vortex Combustor Using Two Equation Turbulence ModelsDocument12 pagesCold Flow Analysis of Trapped Vortex Combustor Using Two Equation Turbulence ModelsAnonymous 6SivdzjNo ratings yet
- 1 s2.0 S0167610512001882 MainDocument8 pages1 s2.0 S0167610512001882 Mainufu_santosNo ratings yet
- Simulação Numerica Do VentoDocument10 pagesSimulação Numerica Do VentoTN Engenharia BIMNo ratings yet
- PhysRevFluids 4 034702-AcceptedDocument31 pagesPhysRevFluids 4 034702-AcceptedDhaval SolankiNo ratings yet
- Analysis+of+Non Symmetrical+Flapping+AirfoilsDocument18 pagesAnalysis+of+Non Symmetrical+Flapping+AirfoilsAsif HameedNo ratings yet
- A Numerical Study of The Propulsive Eciency of A Apping HydrofoilDocument34 pagesA Numerical Study of The Propulsive Eciency of A Apping HydrofoilMANNE SAHITHINo ratings yet
- Application of Low-Re Turbulence Models For Flow Simulations Past Underwater Vehicle Hull FormsDocument14 pagesApplication of Low-Re Turbulence Models For Flow Simulations Past Underwater Vehicle Hull FormspatrickNX9420No ratings yet
- Sheng - Aerodynamic Analysis of A Spinning Missile Using A High-Order Unstructured-Grid SchemeDocument16 pagesSheng - Aerodynamic Analysis of A Spinning Missile Using A High-Order Unstructured-Grid Schemeplutoni249No ratings yet
- Numerical Bifurcation Analysis of Static Stall of Airfoil and Dynamic StallDocument8 pagesNumerical Bifurcation Analysis of Static Stall of Airfoil and Dynamic Stallzhaojie qinNo ratings yet
- Wing Flutter Analysis2Document23 pagesWing Flutter Analysis2Muthu VelNo ratings yet
- Chaotic Dynamics Model Based On Field-Programmable Analog Array TechnologyDocument9 pagesChaotic Dynamics Model Based On Field-Programmable Analog Array TechnologyInternational Journal of Advances in Applied Sciences (IJAAS)No ratings yet
- Blade Oscillation Mechanism For Aerodynamic DampinDocument7 pagesBlade Oscillation Mechanism For Aerodynamic DampinaddictedtospeedNo ratings yet
- Tzimas 2016 J. Phys. Conf. Ser. 753 032056 PDFDocument13 pagesTzimas 2016 J. Phys. Conf. Ser. 753 032056 PDFJie LIUNo ratings yet
- RM EffectDocument38 pagesRM Effectpatelnoor2023.pnNo ratings yet
- IJATES Paper Anil LorDocument8 pagesIJATES Paper Anil LorNirmal SinghNo ratings yet
- Derakhshandeh, J.F. (2016)Document15 pagesDerakhshandeh, J.F. (2016)Fernando Augusto Alves MendesNo ratings yet
- Abstract: Crude Oil Transport Is An Essential Task in OilDocument4 pagesAbstract: Crude Oil Transport Is An Essential Task in OilJetalNo ratings yet
- Effect of Gusty Inflow On The Jet-Switching Characteristics of A Plunging FoilDocument18 pagesEffect of Gusty Inflow On The Jet-Switching Characteristics of A Plunging FoilArvind ArasuNo ratings yet
- 15th Numerical Towing Tank Symposium PDFDocument223 pages15th Numerical Towing Tank Symposium PDFAnonymous mv84nhzNo ratings yet
- Computed Transient Supercavitating Flow Over A ProjectileDocument14 pagesComputed Transient Supercavitating Flow Over A ProjectileMNirooeiNo ratings yet
- Calculation of Optimum Angle of Attack To Determine Maximum Lift To Drag Ratio of NACA 632-215 AirfoilDocument6 pagesCalculation of Optimum Angle of Attack To Determine Maximum Lift To Drag Ratio of NACA 632-215 AirfoilMAGRINo ratings yet
- 1 s2.0 S1110016822002393 MainDocument13 pages1 s2.0 S1110016822002393 MainNICOLAS ARAUJO FLOREZNo ratings yet
- 2004 - Aeroelastic Response of An Airfoil-Flap System Exposed To Time-Dependent DisturbancesDocument13 pages2004 - Aeroelastic Response of An Airfoil-Flap System Exposed To Time-Dependent DisturbancesFedericoBettiNo ratings yet
- State Space Reconstruction of Non-Linear Stall-Induced Oscillatory Aeroelastic MotionDocument10 pagesState Space Reconstruction of Non-Linear Stall-Induced Oscillatory Aeroelastic MotionJK1175No ratings yet
- Energetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationFrom EverandEnergetic Processes in Follow-Up Electrical Control Systems: International Series of Monographs on Electronics and InstrumentationNo ratings yet
- State of Art On Energy Management Strategy For Hybrid-Powered Unmanned Aerial VehicleDocument16 pagesState of Art On Energy Management Strategy For Hybrid-Powered Unmanned Aerial VehiclecareerNo ratings yet
- Influence of Propeller Configuration On Propulsion System Efficiency of Multi-Rotor Unmanned Aerial VehiclesDocument7 pagesInfluence of Propeller Configuration On Propulsion System Efficiency of Multi-Rotor Unmanned Aerial VehiclescareerNo ratings yet
- Carolyn L. Ramsey, Paul A. Griffiths & Timothy R. Stokes: PovzetekDocument18 pagesCarolyn L. Ramsey, Paul A. Griffiths & Timothy R. Stokes: PovzetekcareerNo ratings yet
- A Propeller Design and Analysis Capability Evaluation For High Altitude ApplicationDocument166 pagesA Propeller Design and Analysis Capability Evaluation For High Altitude ApplicationcareerNo ratings yet
- Design and Control of Novel Tri-Rotor UAV: Mohamed Kara Mohamed Alexander LanzonDocument6 pagesDesign and Control of Novel Tri-Rotor UAV: Mohamed Kara Mohamed Alexander LanzoncareerNo ratings yet
- Hybrid-Electric Propulsion For Automotive and Aviation ApplicationsDocument13 pagesHybrid-Electric Propulsion For Automotive and Aviation ApplicationscareerNo ratings yet
- Review Article Perspectives and Development of Electrical Systems in More Electric AircraftDocument14 pagesReview Article Perspectives and Development of Electrical Systems in More Electric AircraftcareerNo ratings yet
- Linear Models and Calculation of Aeroelastic FlutterDocument10 pagesLinear Models and Calculation of Aeroelastic FluttercareerNo ratings yet
- MQ 36884Document199 pagesMQ 36884careerNo ratings yet
- Triboelectric Series and Induction ChargingDocument6 pagesTriboelectric Series and Induction ChargingDanielle Danica Alcuizar BaguioNo ratings yet
- A Study On Welding Defects of Pressure VesselDocument24 pagesA Study On Welding Defects of Pressure Vesseladamahmad1992100% (1)
- Awareness and Application of Ms Iec - Iso 31010 - 2011 Risk Assessment Techniques1 PDFDocument21 pagesAwareness and Application of Ms Iec - Iso 31010 - 2011 Risk Assessment Techniques1 PDFasushk0% (1)
- Presentation On Market Potential of Tag TasteDocument10 pagesPresentation On Market Potential of Tag TasteRajaNo ratings yet
- Oracle Secure BackupDocument294 pagesOracle Secure BackupCarlos ValderramaNo ratings yet
- MCSL-045 Solved Assignments 2014-15Document6 pagesMCSL-045 Solved Assignments 2014-15manishNo ratings yet
- JKM410 430N 54HL4 (V) F3 enDocument2 pagesJKM410 430N 54HL4 (V) F3 enAmer CajdricNo ratings yet
- Capitulo 9 - Flujo de DatosDocument24 pagesCapitulo 9 - Flujo de DatosOrlando Espinoza ZevallosNo ratings yet
- Nexus 1262 & 1272 CatalogueDocument12 pagesNexus 1262 & 1272 CataloguenaveenNo ratings yet
- Quotation For Blue Star Printek From Boway2010 (1) .09.04Document1 pageQuotation For Blue Star Printek From Boway2010 (1) .09.04Arvin Kumar GargNo ratings yet
- Gym Mega ForceDocument3 pagesGym Mega ForceAnonymous iKb87OINo ratings yet
- Brochure A35g A40g t4f en 22 20050840 DDocument20 pagesBrochure A35g A40g t4f en 22 20050840 DRengga PratamaNo ratings yet
- 88 Numerical Series BASED TECHNOLOGY AWARENESS Grigory GRABOVOIJADocument5 pages88 Numerical Series BASED TECHNOLOGY AWARENESS Grigory GRABOVOIJAStellaEstel93% (15)
- W L 1176Document1 pageW L 1176shama093No ratings yet
- λ-based Design Rules PDFDocument3 pagesλ-based Design Rules PDFvinosujaNo ratings yet
- Bhopal Gas TragedyDocument25 pagesBhopal Gas TragedyHarry AroraNo ratings yet
- InternshipDocument14 pagesInternshipMohammed Shaheeruddin0% (1)
- Johannes Gensfleisch Zur Laden Zum GutenbergDocument2 pagesJohannes Gensfleisch Zur Laden Zum GutenbergNathan SidabutarNo ratings yet
- SBI Clerk Mains Bolt 2023 OliveboardDocument160 pagesSBI Clerk Mains Bolt 2023 OliveboardMaahi ThakorNo ratings yet
- E 321 - 96 - Rtmymq - PDFDocument9 pagesE 321 - 96 - Rtmymq - PDFPrakash MakadiaNo ratings yet
- Hyperion Essbase 6 - 5 Bootcamp - Basic TrainingDocument659 pagesHyperion Essbase 6 - 5 Bootcamp - Basic Trainingrams08No ratings yet
- Research Proposal RubricsDocument1 pageResearch Proposal RubricsRonnie Dalgo0% (1)
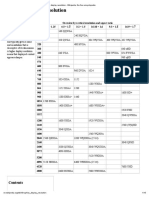
- Graphics Display Resolution - Wikipedia, The Free EncyclopediaDocument15 pagesGraphics Display Resolution - Wikipedia, The Free EncyclopediaKarun KumarNo ratings yet
- ProductBrochure A35F A40F en 30A1006561Document24 pagesProductBrochure A35F A40F en 30A1006561Ji UvexNo ratings yet
- Why Rife Was Right and Hoyland Was Wrong and What To Do About ItDocument4 pagesWhy Rife Was Right and Hoyland Was Wrong and What To Do About ItHayley As Allegedly-Called Yendell100% (1)
- XDM-100 IOM SDH A00 4-5 enDocument334 pagesXDM-100 IOM SDH A00 4-5 endilipgulatiNo ratings yet
- 8) Pengolahan Data DIESEL 1 Katup Gas Konstan-DikonversiDocument47 pages8) Pengolahan Data DIESEL 1 Katup Gas Konstan-DikonversiIndra Arvito ArmanNo ratings yet
- SAP Fiori Deployment OptionsDocument16 pagesSAP Fiori Deployment OptionsVinaykumar PJNo ratings yet
- Return Material Authorization: 1/2 RMA Number Customer No. Purchase Order No. Sales Order DateDocument2 pagesReturn Material Authorization: 1/2 RMA Number Customer No. Purchase Order No. Sales Order DateMichelle PadillaNo ratings yet
- Jinko 570 Mono Facial Jkm570m-7rl4-VDocument2 pagesJinko 570 Mono Facial Jkm570m-7rl4-VShahneela AnsariNo ratings yet