You might also like
- Control Systems - Made Easy PDFDocument27 pagesControl Systems - Made Easy PDFAnonymous UnmfxoCuZ44% (9)
- SAFOP Report Recommendations - SampleDocument21 pagesSAFOP Report Recommendations - Samplelyndon lerias100% (2)
- DC Machines NotesDocument19 pagesDC Machines Notesarshia tabassum100% (1)
- DC Machines SyllabusDocument19 pagesDC Machines SyllabusVijaya Bhasker0% (1)
- DC Servo Paper - Cse007Document4 pagesDC Servo Paper - Cse007DrPrashant M. MenghalNo ratings yet
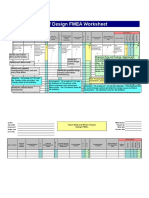
- Example of Design FMEA WorksheetDocument5 pagesExample of Design FMEA Worksheetரஞ்சன் ஞானயோளிNo ratings yet
- De Silva Clarence W Sensors and Actuators Control Systems InstrumentationDocument346 pagesDe Silva Clarence W Sensors and Actuators Control Systems Instrumentationjhon jairoNo ratings yet
- Engineering Design Handbook - Servomechanisms, Sections 1-4Document477 pagesEngineering Design Handbook - Servomechanisms, Sections 1-4sandi123in100% (2)
- Control SystemsDocument120 pagesControl SystemsAnonymous FRJktAGZm100% (1)
- Answers To Review QuestionsDocument17 pagesAnswers To Review QuestionsAndreea MunteanuNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451 L14 TimeResp1st 240116 183517Document4 pagesME451 L14 TimeResp1st 240116 183517epe3630No ratings yet
- ME451 L15 Timeresp2nd 240116 183552Document6 pagesME451 L15 Timeresp2nd 240116 183552epe3630No ratings yet
- ME451: Control Systems Course RoadmapDocument6 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- S Signal Lsands System Ms (Te - 220) : Lect Ture Pla AnDocument3 pagesS Signal Lsands System Ms (Te - 220) : Lect Ture Pla AnOvaisAkhterNo ratings yet
- Mel ZG625 Course HandoutDocument5 pagesMel ZG625 Course HandoutanbuNo ratings yet
- Lecture Plan Exercise Plan: Control Systems Theory and DesignDocument1 pageLecture Plan Exercise Plan: Control Systems Theory and DesignMiguel MartínezNo ratings yet
- Cal 2-Silabo 2018-1Document2 pagesCal 2-Silabo 2018-1Manuel Quesada0% (2)
- Syllabus: Course Information Teacher InformationDocument4 pagesSyllabus: Course Information Teacher InformationReyar SenoNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Ec 2255 Control Systems 3 0 0 3Document4 pagesEc 2255 Control Systems 3 0 0 3muthuNo ratings yet
- ME451: Control Systems Course RoadmapDocument6 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- 1.elements of Mechanical Engineering Science-1Document17 pages1.elements of Mechanical Engineering Science-1Ashrit sarurNo ratings yet
- 475 ProjectDocument10 pages475 ProjectJohn Paul DulayNo ratings yet
- Vishwakarma Institute of Technology: Issue 01: Rev No. 0: Dt. 16/03/16 Course Plan FormatDocument5 pagesVishwakarma Institute of Technology: Issue 01: Rev No. 0: Dt. 16/03/16 Course Plan FormatjdaudpotoNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Syllabus Electrical Machines Subject Code: Ele-405 L T P: 2 1 0 Credits: 03Document3 pagesSyllabus Electrical Machines Subject Code: Ele-405 L T P: 2 1 0 Credits: 03Nitin PalNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Nirma University Institute of Technology Department of Electrical Engineering Subject: EE302: Network Analysis and SynthesisDocument3 pagesNirma University Institute of Technology Department of Electrical Engineering Subject: EE302: Network Analysis and SynthesisAakarshak NandwaniNo ratings yet
- Automotive Electrical and Elctronics SystemsDocument15 pagesAutomotive Electrical and Elctronics SystemsAmrithNo ratings yet
- Ae Zg511 Course HandoutDocument4 pagesAe Zg511 Course HandoutJoel George AlexNo ratings yet
- 3300008applied MechanicsDocument4 pages3300008applied MechanicsJayesh GalcharNo ratings yet
- ME L20 RootLocusLeadDocument6 pagesME L20 RootLocusLeadRezkodaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Course Code: M105 DESCRIPTIVE TITLE: Calculus With Analytic Geometry Prerequisite (S) : Credit Units: 3 Course DescriptionDocument23 pagesCourse Code: M105 DESCRIPTIVE TITLE: Calculus With Analytic Geometry Prerequisite (S) : Credit Units: 3 Course DescriptionMarjorie MalvedaNo ratings yet
- K.K.Wagh Polytechnic, Nashik Teaching Plan (Academic Year: 2018-19)Document5 pagesK.K.Wagh Polytechnic, Nashik Teaching Plan (Academic Year: 2018-19)Manisha SuryawanshiNo ratings yet
- VTU EEE Syllabus OLDDocument83 pagesVTU EEE Syllabus OLDp2183957No ratings yet
- Ee2022-10 TosDocument25 pagesEe2022-10 TosAbbas MaghazehiNo ratings yet
- Abridged Syllabus - Meng 135 - DC and Ac MachineryDocument7 pagesAbridged Syllabus - Meng 135 - DC and Ac MachineryJiggy Lawrence BathanNo ratings yet
- PT XXX - JOB ACTIVITIES (Rev 3)Document194 pagesPT XXX - JOB ACTIVITIES (Rev 3)Riski SaputraNo ratings yet
- Solution Manual For Technical Mathematics 4th EditionDocument27 pagesSolution Manual For Technical Mathematics 4th Editionglyphlurch.kibt3100% (40)
- Full Download Solution Manual For Technical Mathematics 4th Edition PDF Full ChapterDocument22 pagesFull Download Solution Manual For Technical Mathematics 4th Edition PDF Full Chapterdecapodableaterl7r4100% (19)
- Full Solution Manual For Technical Mathematics 4Th Edition PDF Docx Full Chapter ChapterDocument36 pagesFull Solution Manual For Technical Mathematics 4Th Edition PDF Docx Full Chapter Chapterfilter.believer827ly100% (12)
- Controller Design Based On Transient Response CriteriaDocument45 pagesController Design Based On Transient Response CriteriaDEVI RAJENDRANNo ratings yet
- Government Polytechnic, Pune: ET2107 - NODocument8 pagesGovernment Polytechnic, Pune: ET2107 - NOG012 Bhise AniketNo ratings yet
- Design of Lag Compensator Using Root Locus: Lecture OutlineDocument20 pagesDesign of Lag Compensator Using Root Locus: Lecture OutlineArbab HaiderNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Basic Electrical Engineering: Course ObjectiveDocument5 pagesBasic Electrical Engineering: Course Objectivebiswajit04No ratings yet
- Switch Gear and ProtectionDocument15 pagesSwitch Gear and ProtectionLaxmiKrishnaNo ratings yet
- Module OutlineDocument5 pagesModule Outlinemunyaradzi ChipereNo ratings yet
- CEP Control System Sp2019V2Document3 pagesCEP Control System Sp2019V2Ahmed AkramNo ratings yet
- Gate ESE PSC: Career A+ (/comingsoon)Document4 pagesGate ESE PSC: Career A+ (/comingsoon)sonalliNo ratings yet
- FRM P-1 - Lecture Guide - 2023 - Google SheetsDocument34 pagesFRM P-1 - Lecture Guide - 2023 - Google Sheetscha7738713649No ratings yet
- Department of Electronics and Communication Engineering: Subject: Vlsi Signal ProcessingDocument8 pagesDepartment of Electronics and Communication Engineering: Subject: Vlsi Signal ProcessingRaja PirianNo ratings yet
- ME L21 RootLocusLagDocument5 pagesME L21 RootLocusLagRezkodaNo ratings yet
- Michael DarterDocument43 pagesMichael Darternajuka ghodvindeNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- rptIpPrintNew 8Document7 pagesrptIpPrintNew 8Akash PushpNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Controller Design Based On Transient Response CriteriaDocument45 pagesController Design Based On Transient Response Criteriameseret sisayNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
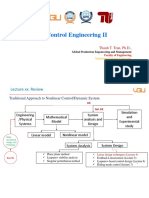
- Control Engineering II: Thanh T. Tran, PH.D.Document36 pagesControl Engineering II: Thanh T. Tran, PH.D.Thiên BùiNo ratings yet
- Laboratory Exercise No. 6 Poles and Zeros of A Transfer FunctionDocument10 pagesLaboratory Exercise No. 6 Poles and Zeros of A Transfer FunctionYasmin KayeNo ratings yet
- Design Via Root LocusDocument40 pagesDesign Via Root LocusmaisababnehNo ratings yet
- Robot Modelling and Control PDFDocument10 pagesRobot Modelling and Control PDFalper senemNo ratings yet
- Extc 5TH Sem Syll 2021Document21 pagesExtc 5TH Sem Syll 2021Dinesh RathiNo ratings yet
- Control Systems Lesson Plan Format 4Document2 pagesControl Systems Lesson Plan Format 4Praveen KakatiyaNo ratings yet
- Basic Feedback Control in Bio Medicine 2009Document222 pagesBasic Feedback Control in Bio Medicine 2009j2ch5en100% (1)
- Module-2 Digital Control SystemsDocument54 pagesModule-2 Digital Control Systemsmohan krishna0% (1)
- S. No Lecture Nos Unit No'S TopicDocument3 pagesS. No Lecture Nos Unit No'S TopicNileshIndulkarNo ratings yet
- Input-Controlled Buck Converter For Photovoltaic Applications: Modeling and DesignDocument5 pagesInput-Controlled Buck Converter For Photovoltaic Applications: Modeling and DesignIlva Leandro ElenaNo ratings yet
- Kee-552 Control System LabDocument55 pagesKee-552 Control System Labmat labNo ratings yet
- Cs Unit-2 PDFDocument33 pagesCs Unit-2 PDFMohan KrishnaNo ratings yet
- Practical Work Book LCSDocument62 pagesPractical Work Book LCSMohammad Zohaib Khan KambohNo ratings yet
- Control Systems IMP QUESTIONSDocument8 pagesControl Systems IMP QUESTIONSHarika HarikaNo ratings yet
- Control System EngineeringDocument2 pagesControl System EngineeringGokulNo ratings yet
- Short Answer (Chapter 1) : Jerry Croft Fri Sep 07 04:34:00 PDT 2012Document29 pagesShort Answer (Chapter 1) : Jerry Croft Fri Sep 07 04:34:00 PDT 2012Asad saeedNo ratings yet
- Low Complex System For Levitating Ferromagnetic Ma PDFDocument15 pagesLow Complex System For Levitating Ferromagnetic Ma PDFtooba mukhtarNo ratings yet
- Control SystemsDocument8 pagesControl SystemspadmajasivaNo ratings yet
- Control Engineering: AssignmentDocument2 pagesControl Engineering: AssignmentAli HamzaNo ratings yet
- Simulation Paper 8Document8 pagesSimulation Paper 8Sandip KumarNo ratings yet
- A5405-Digital Control SystemsDocument2 pagesA5405-Digital Control Systemshari0118No ratings yet
- Control Systems Course OutlineDocument3 pagesControl Systems Course OutlineWaqar AliNo ratings yet
- CONTROL SYSTEMS (Core Subject) B.E., VI Semester, Electrical and Electronics Engineering (As Per Choice Based Credit System (CBCS) Scheme)Document2 pagesCONTROL SYSTEMS (Core Subject) B.E., VI Semester, Electrical and Electronics Engineering (As Per Choice Based Credit System (CBCS) Scheme)tabassNo ratings yet
- Jntua B.tech 2-1 Eee r15Document20 pagesJntua B.tech 2-1 Eee r15Vinodhkumar ReddyNo ratings yet
- Computer Science 2006 Sem V& VIDocument17 pagesComputer Science 2006 Sem V& VIJinu MadhavanNo ratings yet
- Control Systems KSTDocument9 pagesControl Systems KSTAnkit Kumar100% (3)