You might also like
- ME L21 RootLocusLagDocument5 pagesME L21 RootLocusLagRezkodaNo ratings yet
- ME L20 RootLocusLeadDocument6 pagesME L20 RootLocusLeadRezkodaNo ratings yet
- ME451: Control Systems Course RoadmapDocument6 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME L19 RootLocusMultiparaDocument4 pagesME L19 RootLocusMultiparaRezkodaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451 L15 Timeresp2nd 240116 183552Document6 pagesME451 L15 Timeresp2nd 240116 183552epe3630No ratings yet
- ME451: Control Systems Course RoadmapDocument6 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Control Systems Course RoadmapDocument5 pagesControl Systems Course RoadmapRezkodaNo ratings yet
- ME451 L20 RootLocusLeadDocument11 pagesME451 L20 RootLocusLeadHayder HadiNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451 L14 TimeResp1st 240116 183517Document4 pagesME451 L14 TimeResp1st 240116 183517epe3630No ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapMarju LasluisaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument6 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Who Needs An EMT Model For Doing Stability Studies 2022Document21 pagesWho Needs An EMT Model For Doing Stability Studies 2022maran sNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Design Optimization For Power-Supplying The Nodes of WSNs - Master Thesis Presentation - Ioannis MandourarakisDocument51 pagesDesign Optimization For Power-Supplying The Nodes of WSNs - Master Thesis Presentation - Ioannis MandourarakisIoannis MandourarakisNo ratings yet
- Design of Lag Compensator Using Root Locus: Lecture OutlineDocument20 pagesDesign of Lag Compensator Using Root Locus: Lecture OutlineArbab HaiderNo ratings yet
- Chapter 7 System Compensation: (Linear Control System Design)Document35 pagesChapter 7 System Compensation: (Linear Control System Design)Khin AyeNo ratings yet
- (B) 18 Pages Converter Dynamics and ControlDocument18 pages(B) 18 Pages Converter Dynamics and ControlClare DianneNo ratings yet
- CE 581 Reinforced Concrete Structures: Lecture 11: Performance Based Assessment and StrengtheningDocument131 pagesCE 581 Reinforced Concrete Structures: Lecture 11: Performance Based Assessment and StrengtheningCelil OrakNo ratings yet
- Part II" Converter Dynamics and Control!: Fundamentals of Power Electronics! Chapter 7: AC Equivalent Circuit Modeling!Document15 pagesPart II" Converter Dynamics and Control!: Fundamentals of Power Electronics! Chapter 7: AC Equivalent Circuit Modeling!Angie EstupiñanNo ratings yet
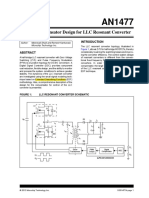
- Digital Compensator Design For LLC Resonant ConverterDocument28 pagesDigital Compensator Design For LLC Resonant ConverterVũ Hùng TrángNo ratings yet
- 02 - Sect 7 5 The Canonical Model - Sect7 5Document14 pages02 - Sect 7 5 The Canonical Model - Sect7 5Ananatha KarthikNo ratings yet
- Electrical Substation Design Course OverviewDocument12 pagesElectrical Substation Design Course Overviewelec.highest.euphratesNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- LRB Non-LinearDocument24 pagesLRB Non-LinearGeEs AnggaNo ratings yet
- Code Coupling For Simulation of Flow-Induced Vibrations: Elisabeth LONGATTE Fabien HUVELIN Mhamed SOULIDocument28 pagesCode Coupling For Simulation of Flow-Induced Vibrations: Elisabeth LONGATTE Fabien HUVELIN Mhamed SOULIAshraf S. HusseinNo ratings yet
- Digital Control Systems (DCS) : Lecture-1-2 Lead CompensationDocument61 pagesDigital Control Systems (DCS) : Lecture-1-2 Lead CompensationMeer Zafarullah NoohaniNo ratings yet
- A Unified Small Signal Analysis of DC-DC Converters With Average Current Mode ControlDocument8 pagesA Unified Small Signal Analysis of DC-DC Converters With Average Current Mode ControlM UMAR ABBASINo ratings yet
- Numerical Reservoir Simulation: Press The Button To StartDocument56 pagesNumerical Reservoir Simulation: Press The Button To StartAnand SelveindranNo ratings yet
- Latest Developments in 3D Charged Particle Simulations: Felix Wolfheimer, CST AGDocument28 pagesLatest Developments in 3D Charged Particle Simulations: Felix Wolfheimer, CST AGPatar PoshakNo ratings yet
- Final Exam CMPE 650: NameDocument10 pagesFinal Exam CMPE 650: NameFritzie LuayonNo ratings yet
- Design Manual Is-800 Chapter 1Document43 pagesDesign Manual Is-800 Chapter 1Vivek Kumar GopeNo ratings yet
- Feedback Control Systems Mathematical Modeling of Dynamic SystemsDocument22 pagesFeedback Control Systems Mathematical Modeling of Dynamic SystemsSherullah KhanNo ratings yet
- Pipeline Sar建模和优化Document5 pagesPipeline Sar建模和优化NRicalNo ratings yet
- 3943754Document8 pages3943754Chandan MithurNo ratings yet
- 651R PF00295Document12 pages651R PF00295intrudentalertNo ratings yet
- Tentang VlsiDocument29 pagesTentang VlsiyoniazharNo ratings yet
- Switch-Mode Power Converter Compensation Made EasyDocument9 pagesSwitch-Mode Power Converter Compensation Made EasyPraveenkumar ChandranNo ratings yet
- SEL-311C: Transmission Protection SystemDocument12 pagesSEL-311C: Transmission Protection SystemRodolfoNo ratings yet
- Chapter 1 NewDocument29 pagesChapter 1 NewMikias YimerNo ratings yet
- Sheet 5Document1 pageSheet 5bipico9217No ratings yet
- 3-1 Modelling ConsiderationsDocument18 pages3-1 Modelling Considerationsluis900000No ratings yet
- LTspice快捷键表 WindowsDocument1 pageLTspice快捷键表 Windows甘甘铠轩No ratings yet
- Lecture15 Laplace Transform in CCT AnalysisDocument11 pagesLecture15 Laplace Transform in CCT AnalysisTahreem AkmalNo ratings yet
- 3.week3 Oral PresentationDocument10 pages3.week3 Oral Presentationtuan tranNo ratings yet
- Reading An Abstract Peeraer and Petegem 2015 (S)Document6 pagesReading An Abstract Peeraer and Petegem 2015 (S)tuan tranNo ratings yet
- 1.TWP Introduction Reading TechnicsDocument14 pages1.TWP Introduction Reading Technicstuan tranNo ratings yet
- Technical Writing & Presentation: Department of Industrial AutomationDocument8 pagesTechnical Writing & Presentation: Department of Industrial Automationtuan tranNo ratings yet
- Scaffolding To Support Learning (S)Document10 pagesScaffolding To Support Learning (S)Vu NghiaNo ratings yet
- How Do I Write A Body Paragraph (S)Document11 pagesHow Do I Write A Body Paragraph (S)Vu NghiaNo ratings yet
- What Makes A Good or Bad Presentation (S)Document15 pagesWhat Makes A Good or Bad Presentation (S)Vu NghiaNo ratings yet
- Reading An Academic Article Peeraer and Petegem 2015 (S)Document14 pagesReading An Academic Article Peeraer and Petegem 2015 (S)tuan tranNo ratings yet
- Bai 5-4Document107 pagesBai 5-4Bùi Việt ĐứcNo ratings yet
- D D D D D D D D: Description/ordering InformationDocument24 pagesD D D D D D D D: Description/ordering InformationVu NghiaNo ratings yet
- Using A Model Report (S)Document10 pagesUsing A Model Report (S)Vu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument6 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- TPTVC/1.5KW: Computer Controlled 1.5 KW Steam Power Plant, With SCADA and PID ControlDocument13 pagesTPTVC/1.5KW: Computer Controlled 1.5 KW Steam Power Plant, With SCADA and PID ControlVu NghiaNo ratings yet
- Dien Tu So Phan Ngoc Nam Loigiaidethigiuaky Doc (Cuuduongthancong - Com)Document9 pagesDien Tu So Phan Ngoc Nam Loigiaidethigiuaky Doc (Cuuduongthancong - Com)Vu NghiaNo ratings yet
- Chap 01 Marlin 2002Document27 pagesChap 01 Marlin 2002Audrey Patrick KallaNo ratings yet
- Tieng Anh Chuyen Nganh Vien Thong - Bai TapDocument86 pagesTieng Anh Chuyen Nganh Vien Thong - Bai TapSU MKNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Logix5000 Controllers Function Block Diagram: Programming ManualDocument33 pagesLogix5000 Controllers Function Block Diagram: Programming ManualVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Automatic Control Course RoadmapDocument5 pagesME451: Automatic Control Course RoadmapVu NghiaNo ratings yet
- 25 PDFDocument7 pages25 PDFVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- A330 RR Trent 700 Technical Training Manual General Familiarization Course - T4 General Level 1Document68 pagesA330 RR Trent 700 Technical Training Manual General Familiarization Course - T4 General Level 1Owen100% (2)
- FINALS - Technology Integration Planning 2023Document3 pagesFINALS - Technology Integration Planning 2023Keziah O. BarrientosNo ratings yet
- Four Gears ModelDocument13 pagesFour Gears ModelPratik PatilNo ratings yet
- Manajemen Data Standar Pelayanan Minimal Rumah Sakit The Hospital Minimum Service Standard Data Management Sigid Nugroho Adhi Kori Puspita NingsihDocument10 pagesManajemen Data Standar Pelayanan Minimal Rumah Sakit The Hospital Minimum Service Standard Data Management Sigid Nugroho Adhi Kori Puspita NingsihririnNo ratings yet
- Fishbone Rawat Inap PDFDocument2 pagesFishbone Rawat Inap PDFAbdul NasirNo ratings yet
- RT Series Manual v005Document44 pagesRT Series Manual v005Muhammed Abo-FandoodNo ratings yet
- Chap 16Document53 pagesChap 16EveNo ratings yet
- Qualities of A Good PresenterDocument2 pagesQualities of A Good PresenterMuhammad Umair KhanNo ratings yet
- Exceptions and Limitation of Patent Rights and Its Enforcement in IndiaDocument8 pagesExceptions and Limitation of Patent Rights and Its Enforcement in IndiaVyas NikhilNo ratings yet
- Solidworks Inspection Data SheetDocument3 pagesSolidworks Inspection Data Sheetradule021No ratings yet
- Evaluation Exam 1 Math Algebra and Trigonometry SET ADocument2 pagesEvaluation Exam 1 Math Algebra and Trigonometry SET AEngr. HLDCNo ratings yet
- CitiBank ApplicationDocument15 pagesCitiBank ApplicationJordan P HunterNo ratings yet
- Principles of Engineering Thermodynamics - SI Version 8th EditionDocument47 pagesPrinciples of Engineering Thermodynamics - SI Version 8th EditionanabNo ratings yet
- 2013 RAMS Determining Right Sample SizeDocument12 pages2013 RAMS Determining Right Sample SizeMemoona SheesNo ratings yet
- Rubber Examination Gloves: Standard Specification ForDocument5 pagesRubber Examination Gloves: Standard Specification ForNguyễn Bảo TrâmNo ratings yet
- Surface Vehicle Standard: Rev. AUG1997Document6 pagesSurface Vehicle Standard: Rev. AUG1997anupthattaNo ratings yet
- Shadowfinder - Big Damn HeroesDocument30 pagesShadowfinder - Big Damn HeroesSteampunkObrimos100% (1)
- Qualitative Study On Stress Among Nurses Working at Private Sector, in Suburban KolkataDocument9 pagesQualitative Study On Stress Among Nurses Working at Private Sector, in Suburban KolkataSandra RNo ratings yet
- Life Cycle Asset ManagementDocument1 pageLife Cycle Asset ManagementJuan EspinosaNo ratings yet
- GGFHJDocument1 pageGGFHJanon_791172439No ratings yet
- CH 9. Heat - Thermodynamics (Phy +1)Document84 pagesCH 9. Heat - Thermodynamics (Phy +1)tomyNo ratings yet
- Nelson 2010 StructuralDocument51 pagesNelson 2010 StructuralGustavo Mateo100% (1)
- Sample Waste Management Tracking FormDocument3 pagesSample Waste Management Tracking FormSreekumarNo ratings yet
- Soal Bahasa Inggris KELAS 7 - Uk 9Document2 pagesSoal Bahasa Inggris KELAS 7 - Uk 9Ruli CandraNo ratings yet
- Introduction To PFADocument7 pagesIntroduction To PFACHRISTINE KYLE CIPRIANONo ratings yet
- Phy12l E301Document5 pagesPhy12l E301Arvn Christian Santicruz FloresNo ratings yet
- Assignment 2 MKT 411Document3 pagesAssignment 2 MKT 411Farhad HossainNo ratings yet
- Jeppesen 021 - 03 - PowerplantDocument274 pagesJeppesen 021 - 03 - PowerplantSadcat97% (29)
- Catalogue - FM-200 PFS - Masteco PDFDocument8 pagesCatalogue - FM-200 PFS - Masteco PDFNguyễn Minh ThiệuNo ratings yet
- Conditions For Effective Innovation On The MacroDocument3 pagesConditions For Effective Innovation On The MacroWinesha U. Smith100% (2)