You might also like
- Analysis and Control of Nonlinear Infinite Dimensional SystemsFrom EverandAnalysis and Control of Nonlinear Infinite Dimensional SystemsNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Control Systems Course RoadmapDocument5 pagesControl Systems Course RoadmapRezkodaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Mathematical Modeling of Dynamic Systems with Laplace TransformDocument22 pagesMathematical Modeling of Dynamic Systems with Laplace TransformSherullah KhanNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Electrical Network Analysis Course DescriptionDocument3 pagesElectrical Network Analysis Course DescriptionTejaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME L19 RootLocusMultiparaDocument4 pagesME L19 RootLocusMultiparaRezkodaNo ratings yet
- EE331 - L09 - Signals & SystemsDocument51 pagesEE331 - L09 - Signals & Systemsahmetyasinbulut99No ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- EE 422G Chapter 6 Laplace Transform Circuit AnalysisDocument15 pagesEE 422G Chapter 6 Laplace Transform Circuit AnalysiserodashokNo ratings yet
- Chapter 6 Applications of The Laplace TransformDocument33 pagesChapter 6 Applications of The Laplace Transformemuemuemu1111No ratings yet
- Space Simulation Lab ManualDocument55 pagesSpace Simulation Lab ManualBhanuNo ratings yet
- Laplace Tansform & The InverseDocument24 pagesLaplace Tansform & The InverseFiga Aghani RosyidNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Lecture17 PDFDocument19 pagesLecture17 PDFAriesFranandaPanjaitanNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451 Control Systems Course RoadmapDocument4 pagesME451 Control Systems Course RoadmapMarju LasluisaNo ratings yet
- Sukkur Iba University Signals and Systems CourseDocument22 pagesSukkur Iba University Signals and Systems CoursebilalNo ratings yet
- Laplace Transform Notes for Automatic Control SystemsDocument24 pagesLaplace Transform Notes for Automatic Control SystemsDaniel SonNo ratings yet
- ME L21 RootLocusLagDocument5 pagesME L21 RootLocusLagRezkodaNo ratings yet
- Laplace Transform Applications and PropertiesDocument17 pagesLaplace Transform Applications and Properties2K20-ME-161 Mridul AnandNo ratings yet
- ME451 Control Systems Course RoadmapDocument6 pagesME451 Control Systems Course RoadmapVu NghiaNo ratings yet
- The Root Locus AnalysisDocument56 pagesThe Root Locus AnalysisJpradha KamalNo ratings yet
- WBUT SYLLABUS FOR DIGITAL ELECTRONICS CIRCUITSDocument32 pagesWBUT SYLLABUS FOR DIGITAL ELECTRONICS CIRCUITSPrachi RaneNo ratings yet
- ELL 100 Introduction to Electrical Engineering Natural ResponseDocument74 pagesELL 100 Introduction to Electrical Engineering Natural ResponseSahil Kumar RajNo ratings yet
- Irjet V5i5593 PDFDocument6 pagesIrjet V5i5593 PDFshantnu iluNo ratings yet
- S-Plane Bode Plots - Identifying Poles and Zeros in A Circuit Transfer FunctionDocument4 pagesS-Plane Bode Plots - Identifying Poles and Zeros in A Circuit Transfer FunctionTere BinNo ratings yet
- 4 eceNetworkTheoryDocument2 pages4 eceNetworkTheoryAkshithaNo ratings yet
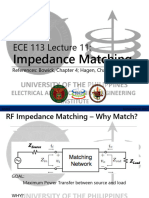
- Ece113 Lec11 Impedance MatchingDocument50 pagesEce113 Lec11 Impedance Matching許耕立No ratings yet
- SCAPS-1D Lecture 4 - HandoutDocument7 pagesSCAPS-1D Lecture 4 - Handoutsumitravashisht1954No ratings yet
- Pres07 MNG512 (111--112) Root Locus AnalysisDocument35 pagesPres07 MNG512 (111--112) Root Locus AnalysisMahmudul HasanNo ratings yet
- An Equivalent Circuit Model of Miniature Double E-Shaped Meander Line Printed Monopole AntennaDocument5 pagesAn Equivalent Circuit Model of Miniature Double E-Shaped Meander Line Printed Monopole AntennababuNo ratings yet
- 6.002 CalendarDocument2 pages6.002 CalendarEric TitanNo ratings yet
- Analysis of A Series RLC Circuit Using Laplace Transforms Part 1Document11 pagesAnalysis of A Series RLC Circuit Using Laplace Transforms Part 1Joe JohnsonNo ratings yet
- (9-11) Introduction To Laplace TransformDocument3 pages(9-11) Introduction To Laplace Transformpratiksha nagdawneNo ratings yet
- Root Locus Analysis ExplainedDocument15 pagesRoot Locus Analysis ExplainedHaelu KuNo ratings yet
- Root Locus: Analyze System Stability & Transient ResponseDocument9 pagesRoot Locus: Analyze System Stability & Transient ResponseJusticeNo ratings yet
- BackgroundDocument29 pagesBackgroundonuraktas1923No ratings yet
- DC Circuit Analysis EssentialsDocument33 pagesDC Circuit Analysis EssentialsFlorin FinaruNo ratings yet
- Microwave and Antennas Assignment BankDocument2 pagesMicrowave and Antennas Assignment Bankvijayarani.katkamNo ratings yet
- Detail Syll B Tech EEDocument22 pagesDetail Syll B Tech EEAshok GhunawatNo ratings yet
- Chapter 1 NewDocument29 pagesChapter 1 NewMikias YimerNo ratings yet
- Distortion Modeling of PIN Diode Switches and Attenuators - CaverlyDocument4 pagesDistortion Modeling of PIN Diode Switches and Attenuators - CaverlySinisa HristovNo ratings yet
- ME L20 RootLocusLeadDocument6 pagesME L20 RootLocusLeadRezkodaNo ratings yet
- Laplace TutorialDocument20 pagesLaplace Tutorialmaybej198No ratings yet
- ME451: Control Systems Course RoadmapDocument6 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- P B S C: Seudopotentials For AND Tructure AlculationsDocument69 pagesP B S C: Seudopotentials For AND Tructure Alculationsxabihdez05No ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument6 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Control Systems (CS) : Lecture-8 Root LocusDocument88 pagesControl Systems (CS) : Lecture-8 Root LocusKiranKumarNo ratings yet
- Stability Analysis: Unit-IiiDocument11 pagesStability Analysis: Unit-IiirocklinetoNo ratings yet
- Post HF Method - SouravDocument70 pagesPost HF Method - SouravRimple MaheyNo ratings yet
- T RLC - P: Eaching Parallel Circuits in High School Hysics ClassDocument14 pagesT RLC - P: Eaching Parallel Circuits in High School Hysics Classقويه TasmanNo ratings yet
- What Makes A Good or Bad Presentation (S)Document15 pagesWhat Makes A Good or Bad Presentation (S)Vu NghiaNo ratings yet
- Reading An Academic Article Peeraer and Petegem 2015 (S)Document14 pagesReading An Academic Article Peeraer and Petegem 2015 (S)tuan tranNo ratings yet
- Scaffolding To Support Learning (S)Document10 pagesScaffolding To Support Learning (S)Vu NghiaNo ratings yet
- 3.week3 Oral PresentationDocument10 pages3.week3 Oral Presentationtuan tranNo ratings yet
- How Do I Write A Body Paragraph (S)Document11 pagesHow Do I Write A Body Paragraph (S)Vu NghiaNo ratings yet
- Reading An Abstract Peeraer and Petegem 2015 (S)Document6 pagesReading An Abstract Peeraer and Petegem 2015 (S)tuan tranNo ratings yet
- Pomodoro Technique PresentationDocument8 pagesPomodoro Technique Presentationtuan tranNo ratings yet
- Bai 5-4Document107 pagesBai 5-4Bùi Việt ĐứcNo ratings yet
- Dien Tu So Phan Ngoc Nam Loigiaidethigiuaky Doc (Cuuduongthancong - Com)Document9 pagesDien Tu So Phan Ngoc Nam Loigiaidethigiuaky Doc (Cuuduongthancong - Com)Vu NghiaNo ratings yet
- D D D D D D D D: Description/ordering InformationDocument24 pagesD D D D D D D D: Description/ordering InformationVu NghiaNo ratings yet
- Tieng Anh Chuyen Nganh Vien Thong - Bai TapDocument86 pagesTieng Anh Chuyen Nganh Vien Thong - Bai TapSU MKNo ratings yet
- Chap 01 Marlin 2002Document27 pagesChap 01 Marlin 2002Audrey Patrick KallaNo ratings yet
- 1.TWP Introduction Reading TechnicsDocument14 pages1.TWP Introduction Reading Technicstuan tranNo ratings yet
- Using A Model Report (S)Document10 pagesUsing A Model Report (S)Vu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- Computer Controlled 1.5 kW Steam Power Plant with SCADA and PID ControlDocument13 pagesComputer Controlled 1.5 kW Steam Power Plant with SCADA and PID ControlVu NghiaNo ratings yet
- ME451 Control Systems Course RoadmapDocument6 pagesME451 Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451 course roadmap modeling analysis and designDocument5 pagesME451 course roadmap modeling analysis and designVu NghiaNo ratings yet
- Logix5000 Controllers Function Block Diagram: Programming ManualDocument33 pagesLogix5000 Controllers Function Block Diagram: Programming ManualVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument3 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument6 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument5 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- 25 PDFDocument7 pages25 PDFVu NghiaNo ratings yet
- ME451: Control Systems Course RoadmapDocument4 pagesME451: Control Systems Course RoadmapVu NghiaNo ratings yet
- ME451: Automatic Control Course RoadmapDocument5 pagesME451: Automatic Control Course RoadmapVu NghiaNo ratings yet
- AI Predicts Indonesian Oil and Gas Export ValuesDocument12 pagesAI Predicts Indonesian Oil and Gas Export ValuesAkbar 20No ratings yet
- Reliability Centered Maintenance (RCM) ProgramDocument8 pagesReliability Centered Maintenance (RCM) ProgramWily Fitra Dermawan100% (1)
- DFD Food Ordering SystemDocument3 pagesDFD Food Ordering SystemRiajimin100% (1)
- CST 04Document95 pagesCST 04Sourav ChoubeyNo ratings yet
- Mechanical Engineering 4R03 Mechanical Controls: Student NameDocument2 pagesMechanical Engineering 4R03 Mechanical Controls: Student NameMr HussoNo ratings yet
- Chap 1-Data and Information Assignment1 With AnswerDocument2 pagesChap 1-Data and Information Assignment1 With AnswerPoornima CNNo ratings yet
- Life Cycle Models: Dr. R. MallDocument63 pagesLife Cycle Models: Dr. R. MallSagarica BrahmaNo ratings yet
- Problem Set 6 Solutions: 6.245: Multivariable Control Systems by A. MegretskiDocument6 pagesProblem Set 6 Solutions: 6.245: Multivariable Control Systems by A. MegretskisergiovelasquezgNo ratings yet
- Human Capital ManagementDocument7 pagesHuman Capital Managementaiswaryasajeevan014No ratings yet
- Ece550 Hw4 AGC f4Document2 pagesEce550 Hw4 AGC f4Swaroop MohapatraNo ratings yet
- Study Software Economics Resource AllocationDocument10 pagesStudy Software Economics Resource AllocationAbdul Raheem MemonNo ratings yet
- Autonomic ComputingDocument17 pagesAutonomic ComputingRaghu MalavathNo ratings yet
- Project Schedule Management: GuideDocument3 pagesProject Schedule Management: GuideLaurence SarmientoNo ratings yet
- Air Pollution Modelling With Deep Learning A ReviewDocument6 pagesAir Pollution Modelling With Deep Learning A ReviewliluNo ratings yet
- Face - Emotion Recog - ImplementationDocument11 pagesFace - Emotion Recog - ImplementationAwatef MessaoudiNo ratings yet
- Quality Manual (q1) Version - 4.6 May 2011Document22 pagesQuality Manual (q1) Version - 4.6 May 2011miles.lam.icoNo ratings yet
- MCS 034 PDFDocument3 pagesMCS 034 PDFRajat KoundalNo ratings yet
- Advantages and Disadvantages of RADDocument11 pagesAdvantages and Disadvantages of RADHanumantha Rao MallelaNo ratings yet
- Expert System Expert SystemsDocument3 pagesExpert System Expert SystemsBeyaNo ratings yet
- Slides of Software Engineering ConsortiumDocument611 pagesSlides of Software Engineering ConsortiumAmudhan KandasameNo ratings yet
- RUPSec Extending Business ModelingDocument8 pagesRUPSec Extending Business ModelingJhon VelaNo ratings yet
- DSPDocument6 pagesDSPindhu_giri2No ratings yet
- The UX Book Process and Guidelines For Ensuring A ... - (Chapter 14 Rigorous Empirical Evaluation Preparation) PDFDocument1 pageThe UX Book Process and Guidelines For Ensuring A ... - (Chapter 14 Rigorous Empirical Evaluation Preparation) PDFMukul JaggiNo ratings yet
- SW Development ProcessDocument20 pagesSW Development ProcessMaria PetreaNo ratings yet
- Oose 4Document46 pagesOose 4Habtamu YihuneNo ratings yet
- DIS 2023 - PDF AgendaDocument61 pagesDIS 2023 - PDF AgendaollepakvarnNo ratings yet
- An Extension of Newton-Type Algorithms For Nonlinear Process ControlDocument6 pagesAn Extension of Newton-Type Algorithms For Nonlinear Process ControlGustavo Gabriel Jimenez100% (1)
- Toward A New ATM Software Safety Assessment MethodologyDocument16 pagesToward A New ATM Software Safety Assessment Methodologyme_idungNo ratings yet
- Exam ReviewDocument27 pagesExam ReviewKent Adrian Marimat (Kent)No ratings yet
- Artificial Neural Networ (ANN)Document6 pagesArtificial Neural Networ (ANN)vidia adenisaNo ratings yet