You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5796)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Experiments With Interactional Expertise - Harry Collins, Rob Evans, Rodrigo Ribeiro, Martin Hall 2006Document19 pagesExperiments With Interactional Expertise - Harry Collins, Rob Evans, Rodrigo Ribeiro, Martin Hall 2006Ali QuisNo ratings yet
- Meaning, Nature and Scope of Eduactional TechnologyDocument19 pagesMeaning, Nature and Scope of Eduactional TechnologyDr. Nisanth.P.M76% (17)
- 833Document40 pages833B. MerkurNo ratings yet
- Trading Zones and Interactional Expertise Harry Collins Robert Evans Mike Gorman 2007Document10 pagesTrading Zones and Interactional Expertise Harry Collins Robert Evans Mike Gorman 2007Ali QuisNo ratings yet
- The Bread-Making Machine Tacit Knowledge and Two Types of Action - Rodrigo Ribeiro and Harry Collins 2007Document18 pagesThe Bread-Making Machine Tacit Knowledge and Two Types of Action - Rodrigo Ribeiro and Harry Collins 2007Ali QuisNo ratings yet
- A New Programme of Research? - Harry Collins 2007Document6 pagesA New Programme of Research? - Harry Collins 2007Ali QuisNo ratings yet
- Lead Into Gold The Science of Finding Nothing - Harry Collins 2003Document31 pagesLead Into Gold The Science of Finding Nothing - Harry Collins 2003Ali QuisNo ratings yet
- Transmuted Expertise How Technical Non-Experts Can Assess Experts and Expertise - Harry Collins Martin Weinel 2011Document14 pagesTransmuted Expertise How Technical Non-Experts Can Assess Experts and Expertise - Harry Collins Martin Weinel 2011Ali QuisNo ratings yet
- Metaphysical Deja Vu Hacking and Latour On Science Studies and Metaphysics - Martin Kusch 2002Document9 pagesMetaphysical Deja Vu Hacking and Latour On Science Studies and Metaphysics - Martin Kusch 2002Ali QuisNo ratings yet
- Mangled Up in Blue' - Trevor Pinch 1999Document9 pagesMangled Up in Blue' - Trevor Pinch 1999Ali QuisNo ratings yet
- The Experimenter's Regress As Philosophical Sociology - Harry Collins 2002Document8 pagesThe Experimenter's Regress As Philosophical Sociology - Harry Collins 2002Ali QuisNo ratings yet
- Is Seeing Believing? Why Public Experiments Often Fail and Sometimes Work - Simon SchafferDocument11 pagesIs Seeing Believing? Why Public Experiments Often Fail and Sometimes Work - Simon SchafferAli QuisNo ratings yet
- Response To Collins About One Point' That Is Absent From My Review of His Book - Yves Gingras 2009Document1 pageResponse To Collins About One Point' That Is Absent From My Review of His Book - Yves Gingras 2009Ali QuisNo ratings yet
- Who Is To Blame For The Challenger Explosion?: Harry Collins, Trevor PinchDocument2 pagesWho Is To Blame For The Challenger Explosion?: Harry Collins, Trevor PinchAli QuisNo ratings yet
- Gingras and The Rules Regress - Harry Collins 2009Document1 pageGingras and The Rules Regress - Harry Collins 2009Ali QuisNo ratings yet
- Department of Tourism and Hospitality MangementDocument25 pagesDepartment of Tourism and Hospitality MangementPritom PyareNo ratings yet
- CRI 222 - SYLLABUS - RevisedDocument8 pagesCRI 222 - SYLLABUS - RevisedCASTER TROY BALONo ratings yet
- Kevin CV CasgDocument7 pagesKevin CV Casgapi-424286263No ratings yet
- Wisconsin Common Core StandardsDocument230 pagesWisconsin Common Core StandardsLisa FosterNo ratings yet
- 2019 Data 1901Document6 pages2019 Data 1901Amy TNo ratings yet
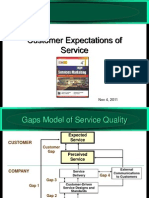
- Customer Expectations of ServiceDocument14 pagesCustomer Expectations of Servicejatin_ahuja03No ratings yet
- Professor Badiuzzaman CVDocument10 pagesProfessor Badiuzzaman CVbadiuzzamanNo ratings yet
- Jangloos Part 2 by Shaukat Siddiqui PDF WWW Aiourdubooks NetDocument214 pagesJangloos Part 2 by Shaukat Siddiqui PDF WWW Aiourdubooks NetJameel roonjhoNo ratings yet
- Preparing For The Solid Edge Professional Certification ExamDocument29 pagesPreparing For The Solid Edge Professional Certification ExamAnderson PereiraNo ratings yet
- GRADES 1 To 12 Daily Lesson LogDocument5 pagesGRADES 1 To 12 Daily Lesson LogLeahlie OlvedaNo ratings yet
- LudhianaDocument98 pagesLudhianaSoham AroraNo ratings yet
- 0417 w16 Ms 2 PDFDocument23 pages0417 w16 Ms 2 PDFAhmad BatranNo ratings yet
- LIFE DETECTION SYSTEM USING L AND S BAND MICROWAVE Final Seminar ReportDocument29 pagesLIFE DETECTION SYSTEM USING L AND S BAND MICROWAVE Final Seminar ReportRahul K100% (1)
- Methodology Preparations Introductory Activity: (10 Mins)Document5 pagesMethodology Preparations Introductory Activity: (10 Mins)Roldan CaroNo ratings yet
- Final Project Outline 1Document2 pagesFinal Project Outline 1api-483842715No ratings yet
- IDSP Annual Report 2015Document50 pagesIDSP Annual Report 2015PublicationsNo ratings yet
- AdmitCard Entrance Final-Admit-Card - PHP Url ADMIT CARDDocument1 pageAdmitCard Entrance Final-Admit-Card - PHP Url ADMIT CARDRahulDeyNo ratings yet
- NSB Brochure AnnamalaiDocument48 pagesNSB Brochure AnnamalaiAnandu NairNo ratings yet
- What Is Built Heritage?Document23 pagesWhat Is Built Heritage?shilpiNo ratings yet
- Well Child Assessment - Developmental Milestones and Education by AgeDocument1 pageWell Child Assessment - Developmental Milestones and Education by AgeTony DawaNo ratings yet
- Hubungan Pembinaan Negara Bangsa Terhadap Self EsteemDocument11 pagesHubungan Pembinaan Negara Bangsa Terhadap Self EsteemKhairul Yop AzreenNo ratings yet
- Indian Culture and HeritageDocument1,329 pagesIndian Culture and HeritageNagarjuna DevarapuNo ratings yet
- Week 4 Triangle Congruence PostulateDocument10 pagesWeek 4 Triangle Congruence PostulateAIRESHANENo ratings yet
- Lung Gom Pa RunnersDocument6 pagesLung Gom Pa RunnersJohnette Ricchetti50% (4)
- Hs&ha PDFDocument22 pagesHs&ha PDFDrnuzhat FatemaNo ratings yet
- Toetzaed 201 Formobservfa 09Document4 pagesToetzaed 201 Formobservfa 09api-252924047No ratings yet
- 2nd Grade Map UnitDocument123 pages2nd Grade Map Unitapi-28847298100% (1)
- 2021 2022 Slide For Opcrf Presentation Smnhs Elvira R ConeseDocument67 pages2021 2022 Slide For Opcrf Presentation Smnhs Elvira R ConeseCoreen Denielle T. Dela VegaNo ratings yet