You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
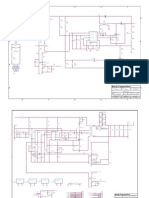
- Dell 2407 WFP Power Supply Rev A11 Schematic DiagramDocument3 pagesDell 2407 WFP Power Supply Rev A11 Schematic Diagram113352356858594% (17)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- PDI ChecklistDocument2 pagesPDI ChecklistAmmar Baig80% (5)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Lab 7Document3 pagesLab 7Walid Mohammed Suliman100% (1)
- Tests of 3-Phase SystemsDocument26 pagesTests of 3-Phase SystemsNgô KiệtNo ratings yet
- EIL Letter No61Document3 pagesEIL Letter No61Navneet SinghNo ratings yet
- Lec 15Document29 pagesLec 15Sheikh SajidNo ratings yet
- Itop Portal Manual - 0 PDFDocument12 pagesItop Portal Manual - 0 PDFwassimaNo ratings yet
- Lavadora LG WD-3274RHD Manual de ServicioDocument43 pagesLavadora LG WD-3274RHD Manual de Serviciogandaras69832653No ratings yet
- YCM FV SeriesDocument18 pagesYCM FV SeriesCNC SYSTEMSNo ratings yet
- Thermal MEMSDocument52 pagesThermal MEMSBhanu PrakashNo ratings yet
- Aqa Phyb5 W QP Jan11Document20 pagesAqa Phyb5 W QP Jan11Prince AhmedNo ratings yet
- Lte Guide NileDocument17 pagesLte Guide NileSenthilkumar PurushothamanNo ratings yet
- Yealink YHS33 Professional Call Centre IP Phone Headset With Noise CancellingDocument2 pagesYealink YHS33 Professional Call Centre IP Phone Headset With Noise CancellingWebAntics.com Online Shopping StoreNo ratings yet
- Profibus MaherDocument271 pagesProfibus MaherHOJJAT BAGHERINo ratings yet
- Presentation On Motors & VFD: Submitted To:-Submitted ByDocument32 pagesPresentation On Motors & VFD: Submitted To:-Submitted Byparth dosiNo ratings yet
- Activity: Writing Your Name Using Chemical Element Symbols: or The EacherDocument4 pagesActivity: Writing Your Name Using Chemical Element Symbols: or The EacherJeff BalladNo ratings yet
- A Current-Tripler DC-DC Converter PDFDocument8 pagesA Current-Tripler DC-DC Converter PDF李漢祥No ratings yet
- Candy Cg434Document26 pagesCandy Cg434Saša MihajlovNo ratings yet
- Service Manual: Viewsonic Va1903Wb/Va1903Wm Model No Vs11618 19" Color TFT LCD DisplayDocument86 pagesService Manual: Viewsonic Va1903Wb/Va1903Wm Model No Vs11618 19" Color TFT LCD DisplayDaniel BinaghiNo ratings yet
- Nejsa602: Double-Balanced Mixer and OscillatorDocument6 pagesNejsa602: Double-Balanced Mixer and OscillatorSasha Pkhidenko100% (1)
- ReportsDocument23 pagesReportschirag goyalNo ratings yet
- Metercat Data Sheet 1Document2 pagesMetercat Data Sheet 1Yaju JotosNo ratings yet
- Double Layer LecturesDocument38 pagesDouble Layer LecturesKhaled AbeedNo ratings yet
- Savvy Gadget For Visually ChallengedDocument5 pagesSavvy Gadget For Visually ChallengedIJRASETPublicationsNo ratings yet
- Power Transformer Noise, Noise Tests, and Example Test ResultsDocument5 pagesPower Transformer Noise, Noise Tests, and Example Test ResultsChinmay Vaidya100% (1)
- 60A Hybrid ManualDocument4 pages60A Hybrid ManualBook BerryNo ratings yet
- Commnication Sec III CH 2Document92 pagesCommnication Sec III CH 2Naresh Dhanda100% (2)
- 7300EV MODBUS CommProtocol V2.0 (ENG)Document14 pages7300EV MODBUS CommProtocol V2.0 (ENG)Maitry ShahNo ratings yet
- Alternative Linear Motion Systems: ME EN 7960 - Precision Machine Design Topic 5Document14 pagesAlternative Linear Motion Systems: ME EN 7960 - Precision Machine Design Topic 5David Ranford100% (1)
- Magnetic and Thermal Analysis of Current Transformer in Normal and Abnormal ConditionsDocument6 pagesMagnetic and Thermal Analysis of Current Transformer in Normal and Abnormal ConditionsShyam GoyalNo ratings yet