You might also like
- DM KRL-Setup ManualDocument12 pagesDM KRL-Setup Manual박종현No ratings yet
- Industrial Robot Lab SEODocument17 pagesIndustrial Robot Lab SEOJesus Said Mercado VegaNo ratings yet
- User Manual For The Kuka Krc4 Hex Sensor Kit E9 enDocument31 pagesUser Manual For The Kuka Krc4 Hex Sensor Kit E9 enMuntean VladNo ratings yet
- KUKA LOAD 31 enDocument29 pagesKUKA LOAD 31 enGreta Marian Gonzalez Herena100% (1)
- Melfa VisionDocument3 pagesMelfa VisionTetsusaigaNo ratings yet
- Kuka PB Kleinroboter enDocument16 pagesKuka PB Kleinroboter enkolosuxNo ratings yet
- Milling Robot 03 enDocument88 pagesMilling Robot 03 enM12N70% (1)
- 1165 Kuka KR 30 3 Robot Adatlap PDFDocument4 pages1165 Kuka KR 30 3 Robot Adatlap PDFRafael González ChacónNo ratings yet
- Cread CwriteDocument67 pagesCread CwritekolosuxNo ratings yet
- Kuka External CablingDocument33 pagesKuka External Cablingemil100% (1)
- Chapter1N - Robot Introduction (2015) PDFDocument55 pagesChapter1N - Robot Introduction (2015) PDFAZA14No ratings yet
- Kuka»Ъжчилєёѕуинјюkuka Arc Tech AnalogіщччкцібDocument78 pagesKuka»Ъжчилєёѕуинјюkuka Arc Tech Analogіщччкцібpetrozawodsky100% (1)
- Saferobot r10 enDocument108 pagesSaferobot r10 enakraramNo ratings yet
- ArcTechDigital 23 Operación enDocument50 pagesArcTechDigital 23 Operación enberkay dogan100% (1)
- KST SafeOperation 35 enDocument289 pagesKST SafeOperation 35 enMircoNo ratings yet
- KST GripperSpotTech 31 en PDFDocument53 pagesKST GripperSpotTech 31 en PDFfaspNo ratings yet
- Install KUKA - Sim 2.1 enDocument11 pagesInstall KUKA - Sim 2.1 enrx7000No ratings yet
- KUKA KR C4 Assembly and Operating Instructions GuideDocument33 pagesKUKA KR C4 Assembly and Operating Instructions GuideArturo PuenteNo ratings yet
- MA External Axis Box KR C4 Compact enDocument55 pagesMA External Axis Box KR C4 Compact enDave FansolatoNo ratings yet
- DX200 Options Supplement For ETHERNET-IP Safety Function (Router Configuration Guide ROCKWELL GUARDLOGIX PLC)Document22 pagesDX200 Options Supplement For ETHERNET-IP Safety Function (Router Configuration Guide ROCKWELL GUARDLOGIX PLC)Victor Solis BrevisNo ratings yet
- KR-C2 IntroductionDocument18 pagesKR-C2 IntroductionAlexandru Ionut TomaNo ratings yet
- KST CNC 20 enDocument61 pagesKST CNC 20 enJose Ortiz MerinoNo ratings yet
- KR C4 Interbus 11 enDocument65 pagesKR C4 Interbus 11 enOmar Gerardo Sida LopezNo ratings yet
- Nachi Robot Catalog 2012Document20 pagesNachi Robot Catalog 2012Xanti Zabala Da RosaNo ratings yet
- KST CNC 21 enDocument75 pagesKST CNC 21 enShih-Bou WangNo ratings yet
- KST VisionTech 21 enDocument109 pagesKST VisionTech 21 enSandro LourençoNo ratings yet
- KST PalletTech 37 en PDFDocument107 pagesKST PalletTech 37 en PDFRaphael Micheloni100% (1)
- VRC CAM Us PDFDocument108 pagesVRC CAM Us PDFRafael SchroerNo ratings yet
- RobotComms Fanuc v1Document19 pagesRobotComms Fanuc v1Adriana Salazar0% (1)
- KST CRArcTech Digital 32 enDocument65 pagesKST CRArcTech Digital 32 enRodrigo CaldeiraNo ratings yet
- KUKA Load 50 enDocument47 pagesKUKA Load 50 enEdison MalacaraNo ratings yet
- Option KR QUANTEC Working Range Limitation A1 enDocument39 pagesOption KR QUANTEC Working Range Limitation A1 enNicolas RomeroNo ratings yet
- Epson Rc700 Rc700a Controller Manual (r27)Document328 pagesEpson Rc700 Rc700a Controller Manual (r27)TuxtronNo ratings yet
- KUKA Canada Training CatalogueDocument48 pagesKUKA Canada Training CatalogueSaravanan JwaharNo ratings yet
- MA ES KR QUANTEC A1-A3 00-230-274 00-230-275 enDocument33 pagesMA ES KR QUANTEC A1-A3 00-230-274 00-230-275 enNicolas RomeroNo ratings yet
- Electronic Position Switches - Application Manual - ABB RoboticsDocument84 pagesElectronic Position Switches - Application Manual - ABB RoboticsPrabhu100% (2)
- 2018 01 10 KRC4 Training enDocument19 pages2018 01 10 KRC4 Training enMário CoutoNo ratings yet
- Ba KR 16 Arc HW enDocument207 pagesBa KR 16 Arc HW enBerkanBağNo ratings yet
- KUKA Control ToolboxDocument11 pagesKUKA Control ToolboxJavier MiramontesNo ratings yet
- KUKA PB KLEINROBOTER en PDFDocument26 pagesKUKA PB KLEINROBOTER en PDFIhateyouNo ratings yet
- Kuka KR 20-3Document111 pagesKuka KR 20-3RafaelNo ratings yet
- Kuka System SoftwareDocument43 pagesKuka System SoftwarePablo Andrés Sanhueza CarvajalNo ratings yet
- Docu-83 KUKA ArcSense 20 en PDFDocument81 pagesDocu-83 KUKA ArcSense 20 en PDFArūnas TalvaševičiusNo ratings yet
- Kuka RobotsDocument6 pagesKuka Robotssundarspace0% (1)
- 1217 Kuka KR 5 Arc HW Robot AdatlapDocument4 pages1217 Kuka KR 5 Arc HW Robot AdatlapRonny TituanaNo ratings yet
- Kuka Robot Sensor InterfaceDocument85 pagesKuka Robot Sensor InterfaceElbari Omar100% (1)
- Setup and Interfacing of A KUKA Robotics Lab PDFDocument89 pagesSetup and Interfacing of A KUKA Robotics Lab PDFAugustino Nguyen Cao ThangNo ratings yet
- ABB Torch CleanerDocument44 pagesABB Torch CleanerAsim PedicNo ratings yet
- Robotic Packaging and Palletizing Lab ReportDocument12 pagesRobotic Packaging and Palletizing Lab ReportAdeel Ahmad WattooNo ratings yet
- Service Manual E-Series: Original Instructions (EN)Document122 pagesService Manual E-Series: Original Instructions (EN)Jojo LynxiNo ratings yet
- KST ServoGun TC 41 enDocument125 pagesKST ServoGun TC 41 enKristal NewtonNo ratings yet
- KST Ethernet KRL 21 enDocument77 pagesKST Ethernet KRL 21 enJose Ortiz Merino100% (1)
- Additional Axis 3HAC021395-001 RevF enDocument218 pagesAdditional Axis 3HAC021395-001 RevF enJose VegaNo ratings yet
- COMAU Arc-Tin Kem en ManualDocument84 pagesCOMAU Arc-Tin Kem en ManualcabecavilNo ratings yet
- KST SeamTech Tracking 20 enDocument71 pagesKST SeamTech Tracking 20 enMihail AvramovNo ratings yet
- Roboguide Reinstall!!!Document1 pageRoboguide Reinstall!!!Davi Roberto Argona JuniorNo ratings yet
- Winapplcreator Program: Instructions HandbookDocument38 pagesWinapplcreator Program: Instructions HandbookGeneration 3.0100% (1)
- KST ServoGun Basic 30 en PDFDocument210 pagesKST ServoGun Basic 30 en PDFDavid A. GaribayNo ratings yet
- 25 PDFDocument762 pages25 PDFMolitorisz AndorNo ratings yet
- 90209-1025DEA F-Series-AS-Language - Reference - Manual PDFDocument554 pages90209-1025DEA F-Series-AS-Language - Reference - Manual PDFMolitorisz AndorNo ratings yet
- 90203-1104DED E Operation Manual PDFDocument420 pages90203-1104DED E Operation Manual PDFPaulNo ratings yet
- VST EthernetKRL 22 en PDFDocument81 pagesVST EthernetKRL 22 en PDFMolitorisz AndorNo ratings yet
- Heidenhain TC 640 (Eng) PDFDocument948 pagesHeidenhain TC 640 (Eng) PDFDalibor JankovicNo ratings yet
- Robot Programming Manual PDFDocument139 pagesRobot Programming Manual PDFsahil vohra80% (5)
- Basic Robotics Lab 1 OperationDocument23 pagesBasic Robotics Lab 1 OperationMolitorisz AndorNo ratings yet
- Technical Reference Manual: RAPID Instructions, Functions and Data TypesDocument1,760 pagesTechnical Reference Manual: RAPID Instructions, Functions and Data TypesDharanNo ratings yet
- Connect robot with RoboDK (KukaDocument6 pagesConnect robot with RoboDK (KukaRicardo100% (1)
- ProjectLibre User Guide PDFDocument14 pagesProjectLibre User Guide PDFMolitorisz Andor100% (1)
- ProjectLibre User Guide PDFDocument14 pagesProjectLibre User Guide PDFMolitorisz Andor100% (1)
- ProjectLibre User Guide PDFDocument14 pagesProjectLibre User Guide PDFMolitorisz Andor100% (1)
- ProjectLibre User Guide PDFDocument14 pagesProjectLibre User Guide PDFMolitorisz Andor100% (1)
- ProjectLibre User Guide PDFDocument14 pagesProjectLibre User Guide PDFMolitorisz Andor100% (1)
- ProjectLibre User Guide PDFDocument14 pagesProjectLibre User Guide PDFMolitorisz Andor100% (1)
- Butterfly Valves enDocument37 pagesButterfly Valves enMolitorisz AndorNo ratings yet
- KRONOS Workforce Dimensions OnlineDocument3 pagesKRONOS Workforce Dimensions OnlineYashwant KakiNo ratings yet
- Manual Safe PilotDocument13 pagesManual Safe Pilotresp0312No ratings yet
- Equalize-Xpi-Modules - JSON2XMLConverter - Java at Master Engswee - Equalize-Xpi-Modules GitHubDocument3 pagesEqualize-Xpi-Modules - JSON2XMLConverter - Java at Master Engswee - Equalize-Xpi-Modules GitHubmohananudeepNo ratings yet
- Arm 2103Document78 pagesArm 2103nikhilvishwaNo ratings yet
- Free Download Kitab Tajul Muluk PDF Download PDFDocument4 pagesFree Download Kitab Tajul Muluk PDF Download PDFAulia Zulhadi100% (1)
- Sample Network Engineering ResumeDocument3 pagesSample Network Engineering ResumeShahriar Azgar100% (2)
- 2-Arithmetic InstructionDocument15 pages2-Arithmetic Instructionwaheed azizNo ratings yet
- Ansi C1218Document49 pagesAnsi C1218César Andrés Barrios Arroyo75% (8)
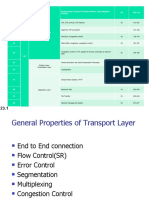
- 29 Design Issues, Process To Process Delivery, User Datagram Protocol R1 703-715Document27 pages29 Design Issues, Process To Process Delivery, User Datagram Protocol R1 703-715shahaban aliNo ratings yet
- Business Modeler IdeDocument1,120 pagesBusiness Modeler IdeSarvesh GhudusNo ratings yet
- Advances in Electronics & Communication Technologies (NCAECT-2015)Document2 pagesAdvances in Electronics & Communication Technologies (NCAECT-2015)Ankit DhimanNo ratings yet
- CS 121 Syllabus Spring 2020Document2 pagesCS 121 Syllabus Spring 2020vonacoc49No ratings yet
- FPT Information System Corporation ProfileDocument48 pagesFPT Information System Corporation ProfileTuấn HuỳnhNo ratings yet
- Ice InfoDocument2 pagesIce Infoavrotem00No ratings yet
- DBMS concepts and componentsDocument140 pagesDBMS concepts and componentsSumiNo ratings yet
- AMD Processor Power and Thermal Data SheetDocument96 pagesAMD Processor Power and Thermal Data SheetDiogo Campos CastroNo ratings yet
- FC503 Addressable Fire Control PanelsDocument6 pagesFC503 Addressable Fire Control Panelsமாருப்-Maruff HMNo ratings yet
- Fernando Chandra - 18820018Document132 pagesFernando Chandra - 18820018Alvian Tedy AdityaNo ratings yet
- Organizational Guidelines and Communication QuestionsDocument8 pagesOrganizational Guidelines and Communication QuestionsRyann Zandueta Elumba80% (5)
- D6 Pro Wi-Fi Ductless ControllerDocument1 pageD6 Pro Wi-Fi Ductless ControllerPaola Andrea Osorio GNo ratings yet
- Oncentra User ManualDocument80 pagesOncentra User ManualOscar Javier GarciaNo ratings yet
- DevlistDocument7 pagesDevlistАтальаьадаNo ratings yet
- 8J4253 - CR V5.4.00.11 Software Recovery InstructionsDocument87 pages8J4253 - CR V5.4.00.11 Software Recovery InstructionsArt MessickNo ratings yet
- Manual 624 102515 ADocument214 pagesManual 624 102515 ActecisbNo ratings yet
- Tamil Typing Practice Book Free Download PDFDocument2 pagesTamil Typing Practice Book Free Download PDFவெங்கடேஷ் ராமசாமிNo ratings yet
- Rison of FI AR Vs FI CADocument11 pagesRison of FI AR Vs FI CASid MehtaNo ratings yet
- Sakai Training ManualDocument39 pagesSakai Training Manualmantrice100% (1)
- Apigee Api Engineer PDFDocument4 pagesApigee Api Engineer PDFSuresh KumarNo ratings yet
- Computer Hardware Maintenance PDFDocument104 pagesComputer Hardware Maintenance PDFKHJoy0% (1)
- Database Design and Implementation Exam June 2006 - UK University BSC Final YearDocument10 pagesDatabase Design and Implementation Exam June 2006 - UK University BSC Final YearTDiscover100% (1)