You might also like
- Introduction to Power System ProtectionFrom EverandIntroduction to Power System ProtectionRating: 5 out of 5 stars5/5 (1)
- Substation Automation Systems: Design and ImplementationFrom EverandSubstation Automation Systems: Design and ImplementationRating: 4.5 out of 5 stars4.5/5 (3)
- SF6 CB CGDocument20 pagesSF6 CB CGPritamNo ratings yet
- TR121 0R TR221 - 8112W00077Document1 pageTR121 0R TR221 - 8112W00077Dave ChaudhuryNo ratings yet
- Horm 4Document6 pagesHorm 4suchandrar100% (2)
- Corel Draw New Product Flyer Tutorial 130528105758 Phpapp01 PDFDocument31 pagesCorel Draw New Product Flyer Tutorial 130528105758 Phpapp01 PDFSima DragosNo ratings yet
- P141Document8 pagesP141lcatelaniNo ratings yet
- SWGR PresentationDocument86 pagesSWGR PresentationManirupa SinhaNo ratings yet
- 7sd52 7sd62 ConfigurationDocument14 pages7sd52 7sd62 ConfigurationWilber LucasNo ratings yet
- SwitchyardDocument33 pagesSwitchyardAafaque QureshiNo ratings yet
- GE G60 Training Manual FOR COA PP PDFDocument33 pagesGE G60 Training Manual FOR COA PP PDFamir ghasemifareNo ratings yet
- Protective Relay Requirements and ApprovalsDocument8 pagesProtective Relay Requirements and ApprovalsJorge DuranNo ratings yet
- STATCOM-ET - 10june-6aug ReportDocument37 pagesSTATCOM-ET - 10june-6aug ReportVamsi SwapnaNo ratings yet
- Motor Protection - Customer-FINAL PDFDocument85 pagesMotor Protection - Customer-FINAL PDFJulio LoaizaNo ratings yet
- Relays Makes Test ProcedureDocument25 pagesRelays Makes Test ProcedureRa HulNo ratings yet
- Procedure For End To End TestingDocument10 pagesProcedure For End To End TestinggjkjaiNo ratings yet
- CSC 326 ManualDocument86 pagesCSC 326 ManualSushant KadavNo ratings yet
- Interlockingonswitchgearprinciples 151126195644 Lva1 App6892Document8 pagesInterlockingonswitchgearprinciples 151126195644 Lva1 App6892Dinesh Pitchaivel100% (1)
- ABB - SPAJ 140C - Electronic RelaysDocument29 pagesABB - SPAJ 140C - Electronic RelaysBruce OngNo ratings yet
- Circuit Breaker SelectionDocument16 pagesCircuit Breaker SelectionCinar Inal100% (3)
- Testing of Distance Protection RelaysDocument8 pagesTesting of Distance Protection RelaysAhmed HamzehNo ratings yet
- 1 19 Battery Earth Fault RelayDocument4 pages1 19 Battery Earth Fault RelayMuhammad NomanNo ratings yet
- Line Current Differential Testing-A Practical ApproachDocument10 pagesLine Current Differential Testing-A Practical ApproachmentongNo ratings yet
- Using GOOSE With SPA-ZC 400 Ethernet Adapter and RE - 541/3/5 TerminalsDocument24 pagesUsing GOOSE With SPA-ZC 400 Ethernet Adapter and RE - 541/3/5 TerminalsnicesreekanthNo ratings yet
- Micom P740: Numerical Busbar ProtectionDocument386 pagesMicom P740: Numerical Busbar ProtectionDinh Xuan Duyet100% (1)
- Busbar ProtectionDocument42 pagesBusbar ProtectionShahzad Bhatti100% (2)
- Areva Busbar ProtectionDocument11 pagesAreva Busbar Protectionreza100% (1)
- Manual DigsiDocument220 pagesManual Digsijoe_cobza100% (2)
- REB500 Exercise ConfigurationDocument9 pagesREB500 Exercise ConfigurationfaharaNo ratings yet
- 7SS52 enDocument418 pages7SS52 envsrikala68No ratings yet
- DCRM WorkshopDocument32 pagesDCRM WorkshoplrpatraNo ratings yet
- Protection Relays Guide PDFDocument56 pagesProtection Relays Guide PDFrameez_zafar6138No ratings yet
- 7-How To Test 7sa522Document39 pages7-How To Test 7sa522ahmedNo ratings yet
- Protection CheckList Rev01Document4 pagesProtection CheckList Rev01Ramesh EpiliNo ratings yet
- Protection Relay Testing and CommissioningDocument56 pagesProtection Relay Testing and CommissioningmrtabiehjNo ratings yet
- Abb Reg 630 PDFDocument72 pagesAbb Reg 630 PDFKrishna Tanuz100% (1)
- Valence Training BrochureDocument12 pagesValence Training Brochurerodruren100% (1)
- RelaySimTest AppNote Line Distance Protection Power Swing Blocking 2017 ENUDocument25 pagesRelaySimTest AppNote Line Distance Protection Power Swing Blocking 2017 ENUkondareddyNo ratings yet
- Motor Protection 7SJ64Document49 pagesMotor Protection 7SJ64Filip MilicNo ratings yet
- Broken Conductor ProtectionDocument2 pagesBroken Conductor ProtectionThirumalNo ratings yet
- Commissioning Testing Complex Busbar Protection Schemes PDFDocument18 pagesCommissioning Testing Complex Busbar Protection Schemes PDFJoel Alcantara100% (1)
- IET600 Training Rev 02Document24 pagesIET600 Training Rev 02osmpot100% (1)
- Relay Terst System Freja 300Document10 pagesRelay Terst System Freja 300Rahil TasawarNo ratings yet
- 7UT613 63xDocument514 pages7UT613 63xdenisseNo ratings yet
- Tech REF615 High-Impedance Differential 757207 ENaDocument10 pagesTech REF615 High-Impedance Differential 757207 ENaFredrikNo ratings yet
- Red 670Document28 pagesRed 670Mahmoud Shafie100% (1)
- Ret 670Document23 pagesRet 670tenk_man100% (2)
- L8b ManualDocument93 pagesL8b ManualRajesh sawaleNo ratings yet
- Current Interruption Transients CalculationFrom EverandCurrent Interruption Transients CalculationRating: 4 out of 5 stars4/5 (1)
- Power System Fault Diagnosis: A Wide Area Measurement Based Intelligent ApproachFrom EverandPower System Fault Diagnosis: A Wide Area Measurement Based Intelligent ApproachNo ratings yet
- Lab 01Document3 pagesLab 01Syed Bilal ArshadNo ratings yet
- Understanding The Low Power Abstraction: Dr. Gary Delp Erich Marschner Kenneth BakalarDocument7 pagesUnderstanding The Low Power Abstraction: Dr. Gary Delp Erich Marschner Kenneth BakalarYasser NaguibNo ratings yet
- Modeling and Verification of RBC Handover Protocol: Kai YangDocument12 pagesModeling and Verification of RBC Handover Protocol: Kai YangTiémogo TRAORENo ratings yet
- PP 41-45 Testing System For Control Panel of SwitchgearDocument6 pagesPP 41-45 Testing System For Control Panel of SwitchgearEditorijset IjsetNo ratings yet
- A Matlab / Simulink Based Tool For Power Electronic CircuitsDocument6 pagesA Matlab / Simulink Based Tool For Power Electronic CircuitstatacpsNo ratings yet
- Time and Current Graded ProtectionDocument1 pageTime and Current Graded Protectionjuljan sinaniNo ratings yet
- Grounding in MVDocument25 pagesGrounding in MVjuljan sinaniNo ratings yet
- 1 5 PDFDocument8 pages1 5 PDFjuljan sinaniNo ratings yet
- Transformer and Transformer Feeder ProtectionDocument42 pagesTransformer and Transformer Feeder Protectionjuljan sinani100% (3)
- A Technical Investigation of Voltage Sag PDFDocument9 pagesA Technical Investigation of Voltage Sag PDFjuljan sinaniNo ratings yet
- Overhead Lines and Cable DataDocument13 pagesOverhead Lines and Cable Datajuljan sinaniNo ratings yet
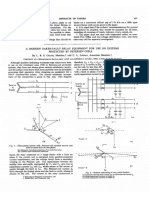
- A Modern Earth-Fault Relay Equipment For Use On Systems Protected by Petersen Coils by L. B. S. Member, and C. L. Associate Member.fDocument2 pagesA Modern Earth-Fault Relay Equipment For Use On Systems Protected by Petersen Coils by L. B. S. Member, and C. L. Associate Member.fjuljan sinaniNo ratings yet
- Integration of Bobj With Sap PortalDocument11 pagesIntegration of Bobj With Sap PortalashukennaNo ratings yet
- Introduction To Ict Lecture Notes - Book EditedDocument98 pagesIntroduction To Ict Lecture Notes - Book EditedArnold ArudaNo ratings yet
- TFT Proto Manual v100Document6 pagesTFT Proto Manual v100ZephyrTRNo ratings yet
- Rest Apis With Plumber::: Cheat SheetDocument2 pagesRest Apis With Plumber::: Cheat SheetLaksh RodriguezNo ratings yet
- Introduction To Tableau - Part 1 - SlidesDocument34 pagesIntroduction To Tableau - Part 1 - SlidesUsmanNo ratings yet
- Share 'CSS NCII Institutional Assessment Task - Docx'Document1 pageShare 'CSS NCII Institutional Assessment Task - Docx'jonathan labajoNo ratings yet
- Shard Hash PatternDocument9 pagesShard Hash PatternDylan GuedesNo ratings yet
- Qam Using Labview SimulationDocument9 pagesQam Using Labview SimulationMichellePérezNo ratings yet
- Solid State Interlocking ModernisationDocument4 pagesSolid State Interlocking ModernisationShIvA SaINo ratings yet
- DSLA White PaperDocument33 pagesDSLA White PaperWilhem PujarNo ratings yet
- Blockchain in Healthcare: Guangjian Huang, Abdullah Al FoysalDocument14 pagesBlockchain in Healthcare: Guangjian Huang, Abdullah Al Foysalshubham thkNo ratings yet
- Cs453 D HTML Javascript 1Document66 pagesCs453 D HTML Javascript 1Elsa SilvaNo ratings yet
- Turn-Of-Nut Bolting MethodDocument12 pagesTurn-Of-Nut Bolting MethodbNo ratings yet
- The QuoteDocument2 pagesThe QuoteAbuela AbueloNo ratings yet
- Module 1: Introduction To Information and Communication TechnologyDocument6 pagesModule 1: Introduction To Information and Communication Technologyᜊ᜔ᜎᜀᜈ᜔ᜃ᜔ ᜃᜈ᜔ᜊᜐ᜔No ratings yet
- GT Publication: General/Computer Books Rate Qty. Mobile Phone Books Rate Qty. H EDocument1 pageGT Publication: General/Computer Books Rate Qty. Mobile Phone Books Rate Qty. H ESANJAYNo ratings yet
- Pss Must FlyerDocument2 pagesPss Must FlyerokandenizerNo ratings yet
- Ad Hoc QuestionsDocument13 pagesAd Hoc QuestionsMadhavan SamNo ratings yet
- 3GPP TS 23.272Document50 pages3GPP TS 23.272Wong Ting FungNo ratings yet
- Accuvix XQDocument8 pagesAccuvix XQbashir019No ratings yet
- Exec SnoopDocument513 pagesExec Snoopsc425000No ratings yet
- Linux TutorialsDocument186 pagesLinux TutorialsWillie Tanyu100% (1)
- Aralin 5: GLOBAL NA PamumuhayDocument29 pagesAralin 5: GLOBAL NA PamumuhayMyyMyy JerezNo ratings yet
- FitSM Overview SlidesDocument37 pagesFitSM Overview SlidesMuhammad NomanNo ratings yet
- Worksheet - 1.1: Name: Tarun Bisht Branch/Sec: CSE/29 - B UID: 20BCS6130 Subject: DS LabDocument5 pagesWorksheet - 1.1: Name: Tarun Bisht Branch/Sec: CSE/29 - B UID: 20BCS6130 Subject: DS Lababhishek kumarNo ratings yet
- Strategic Noise Mapping - v2Document82 pagesStrategic Noise Mapping - v2AgungGhaniKramawijayaNo ratings yet
- CV DasDocument5 pagesCV DasDonny AryobowoNo ratings yet
- Mobile Web vs. Mobile App - Which Is Right For Your Business - by Igor Izraylevych - MediumDocument6 pagesMobile Web vs. Mobile App - Which Is Right For Your Business - by Igor Izraylevych - MediumSofía González CanéNo ratings yet
- Ec160 English ManualDocument227 pagesEc160 English ManualYudi Widodo Louser100% (2)