You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
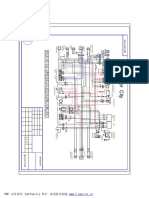
- Cpi Oliver City EldiagramDocument1 pageCpi Oliver City EldiagramHenry BraunNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- bq270v eDocument8 pagesbq270v eOdil0% (1)
- C16 - Diploma in Chemical Engineering (Plastic & Polymers)Document217 pagesC16 - Diploma in Chemical Engineering (Plastic & Polymers)Nandan KumarNo ratings yet
- Cooling Water Treatment PDFDocument2 pagesCooling Water Treatment PDFvjNo ratings yet
- MR-3177 Tiered MarginDocument7 pagesMR-3177 Tiered MarginFahimNo ratings yet
- HKB 18 Manpowerpolicy InwardremittancesDocument50 pagesHKB 18 Manpowerpolicy InwardremittancesFahimNo ratings yet
- New Doc 6 Jun 2021 20.31Document11 pagesNew Doc 6 Jun 2021 20.31FahimNo ratings yet
- New Doc 6 Jun 2021 20.45Document3 pagesNew Doc 6 Jun 2021 20.45FahimNo ratings yet
- New Doc 6 Jun 2021 20.53Document11 pagesNew Doc 6 Jun 2021 20.53FahimNo ratings yet
- Simulink Based Model of PV CellDocument7 pagesSimulink Based Model of PV CellFahimNo ratings yet
- 14 StatisticsDocument15 pages14 StatisticsDROZON GAMING YTNo ratings yet
- 1980 Garelli Engine Manual PDFDocument56 pages1980 Garelli Engine Manual PDFAnonymous YWDOAtINo ratings yet
- CVDocument1 pageCVSiddharth ChauhanNo ratings yet
- New Microsoft Office Word DocumentDocument9 pagesNew Microsoft Office Word DocumentGaurav JaiswalNo ratings yet
- A Control System of DC Motor Speed - Systematic ReviewDocument19 pagesA Control System of DC Motor Speed - Systematic ReviewCanizares1000No ratings yet
- Lunch With AbbreviationsDocument2 pagesLunch With AbbreviationsthefallsteamNo ratings yet
- Biotechnology & Biochemical Engineering: ObjectivesDocument9 pagesBiotechnology & Biochemical Engineering: ObjectivesSusmit NimjeNo ratings yet
- UntitledDocument2 pagesUntitledSergey ShashminNo ratings yet
- 1597752113B.Tech Course StructureDocument2 pages1597752113B.Tech Course StructureMani DhamodharanNo ratings yet
- Anime Neon Vibes Marketing PlanDocument62 pagesAnime Neon Vibes Marketing PlanAL - HusainNo ratings yet
- Product Sheet: Heat Transfer FluidsDocument21 pagesProduct Sheet: Heat Transfer FluidsjeyderNo ratings yet
- 10.4: Eukaryotic Gene RegulationDocument7 pages10.4: Eukaryotic Gene RegulationFlorence Gaone GaongalelweNo ratings yet
- What Is A Pump?Document11 pagesWhat Is A Pump?John John MarfalNo ratings yet
- Reinforcement Concrete: HomeworkDocument6 pagesReinforcement Concrete: HomeworkPiseth HengNo ratings yet
- 1 - Aqueduct RETROSPECTOSDocument10 pages1 - Aqueduct RETROSPECTOSirving.barrios.vzlaNo ratings yet
- Nasib Ahmad Faqirzada Resume CVDocument4 pagesNasib Ahmad Faqirzada Resume CVNasib Ahmad FaqirzadaNo ratings yet
- LS1.1 - V6 Generalized Architecture of Big Data SystemsDocument8 pagesLS1.1 - V6 Generalized Architecture of Big Data SystemsR KrishNo ratings yet
- KoldamDocument13 pagesKoldamHarpreet SinghNo ratings yet
- DOT Hazmat Training For Nuclear Medicine Technologists - Rules of The RoadDocument50 pagesDOT Hazmat Training For Nuclear Medicine Technologists - Rules of The RoadAdji Achmad J BramantyaNo ratings yet
- Benfits of Review BWDocument10 pagesBenfits of Review BWbrianNo ratings yet
- Qaballah and Tarot: A Basic Course in Nine Lessons Lesson III-bbDocument50 pagesQaballah and Tarot: A Basic Course in Nine Lessons Lesson III-bbPolaris93100% (1)
- Gallium Arsenide Gaas MsdsDocument4 pagesGallium Arsenide Gaas MsdsEunice PunzalanNo ratings yet
- Evap-Lt 60 KV CG ShimaDocument439 pagesEvap-Lt 60 KV CG ShimaDax CasraNo ratings yet
- Topic No 11 Properties of CircleDocument14 pagesTopic No 11 Properties of CircleKhizar SaysNo ratings yet
- IMAGINEDocument48 pagesIMAGINEGilherme HenriqueNo ratings yet
- PHD Thesis Cell CultureDocument5 pagesPHD Thesis Cell Culturefc4qgsp7100% (2)