You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Waves TestDocument6 pagesWaves TestArgeena Agao-Agao100% (3)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Sap PM&FM Integration OverviewDocument2 pagesSap PM&FM Integration OverviewMerugu JalendharNo ratings yet
- Ci 1580a Industrial IndicatorDocument9 pagesCi 1580a Industrial IndicatorRusmiyanto YantoNo ratings yet
- Features: Field Stop Trench IGBTDocument8 pagesFeatures: Field Stop Trench IGBTRusmiyanto YantoNo ratings yet
- D-001 AC12V 50A: Ref - No. Application New-Era NoDocument24 pagesD-001 AC12V 50A: Ref - No. Application New-Era NoRusmiyanto YantoNo ratings yet
- AIRMAN PDS175 411 Parts Catalog BTWDocument76 pagesAIRMAN PDS175 411 Parts Catalog BTWRusmiyanto Yanto0% (1)
- Product Recommendation Ammann Single Drum Rollers ASC ASC 100 Cummins Tier 1Document4 pagesProduct Recommendation Ammann Single Drum Rollers ASC ASC 100 Cummins Tier 1Rusmiyanto YantoNo ratings yet
- Temperature Controller: Instruction ManualDocument1 pageTemperature Controller: Instruction ManualRusmiyanto YantoNo ratings yet
- Wire Harness Installation Instructions: For InstallingDocument36 pagesWire Harness Installation Instructions: For InstallingRusmiyanto YantoNo ratings yet
- Anly Temperature ControllerDocument4 pagesAnly Temperature ControllerRusmiyanto YantoNo ratings yet
- New Concept Single Screw Compressors and Their ManDocument10 pagesNew Concept Single Screw Compressors and Their ManRusmiyanto YantoNo ratings yet
- S4L2-Z363SP (H) (SPC-S4L-279 Rev 2) MEEDocument14 pagesS4L2-Z363SP (H) (SPC-S4L-279 Rev 2) MEERusmiyanto YantoNo ratings yet
- v-sd100d-sd10 Manual BookDocument4 pagesv-sd100d-sd10 Manual BookRusmiyanto YantoNo ratings yet
- MCB160047E SB004E MagnaPlus Generators ProductGuide - WebDocument6 pagesMCB160047E SB004E MagnaPlus Generators ProductGuide - WebRusmiyanto YantoNo ratings yet
- Steering Mode Selection Valve With Electromechanical Detent LF1 - 1STR3 (SMV2.0) Patent PendingDocument10 pagesSteering Mode Selection Valve With Electromechanical Detent LF1 - 1STR3 (SMV2.0) Patent PendingRusmiyanto YantoNo ratings yet
- Alternator Installation and Operation Manual: 1/2019 SUP-0207 REV DDocument20 pagesAlternator Installation and Operation Manual: 1/2019 SUP-0207 REV DRusmiyanto YantoNo ratings yet
- ThrottleDocument1 pageThrottleRusmiyanto YantoNo ratings yet
- ON Key Ke.....Document1 pageON Key Ke.....Rusmiyanto YantoNo ratings yet
- GX270 (GCAB) Parts DiagramDocument394 pagesGX270 (GCAB) Parts DiagramRusmiyanto YantoNo ratings yet
- 2/2-, 3/2-, and 4/3-Way Seated Valves Type NBVP 16 With Industrial Standard Connection Pattern Cetop 3 Conforming DIN 24 340-A6Document12 pages2/2-, 3/2-, and 4/3-Way Seated Valves Type NBVP 16 With Industrial Standard Connection Pattern Cetop 3 Conforming DIN 24 340-A6Rusmiyanto YantoNo ratings yet
- Dipan Laci CostDocument1 pageDipan Laci CostRusmiyanto YantoNo ratings yet
- Glow Plug PDFDocument1 pageGlow Plug PDFRusmiyanto YantoNo ratings yet
- Glow PlugDocument1 pageGlow PlugRusmiyanto YantoNo ratings yet
- Power ON KeyDocument1 pagePower ON KeyRusmiyanto YantoNo ratings yet
- ThrottleDocument1 pageThrottleRusmiyanto YantoNo ratings yet
- Brake PDFDocument1 pageBrake PDFRusmiyanto YantoNo ratings yet
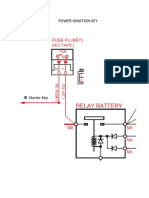
- Power Ign KeyDocument1 pagePower Ign KeyRusmiyanto YantoNo ratings yet
- RelaysDocument1 pageRelaysRusmiyanto YantoNo ratings yet
- Avr As-440 Denyo PDFDocument1 pageAvr As-440 Denyo PDFRusmiyanto Yanto100% (2)
- 4JX1Document421 pages4JX1qq68rv527hNo ratings yet
- 76th VFS Battle BookDocument7 pages76th VFS Battle BookPFunk49No ratings yet
- Accelerated Atmospheric Corrosion Testing Using A Cyclic Wet/Dry Exposure Test: Aluminum, Galvanized Steel, and SteelDocument8 pagesAccelerated Atmospheric Corrosion Testing Using A Cyclic Wet/Dry Exposure Test: Aluminum, Galvanized Steel, and SteelTito MuñozNo ratings yet
- Nicotra Direct Driven Centr FanDocument4 pagesNicotra Direct Driven Centr FanlsaishankarNo ratings yet
- Heat Treatment PDFDocument22 pagesHeat Treatment PDFravi00098No ratings yet
- Tool Function Q+A: # Answer 1Document2 pagesTool Function Q+A: # Answer 1David BumbaloughNo ratings yet
- DIN 2605 (Elbows) PDFDocument3 pagesDIN 2605 (Elbows) PDFAleksandarSashaStankovichNo ratings yet
- UtazásDocument6 pagesUtazásrencsi0611No ratings yet
- AN PRC 104A - Serv - User - TM11 5820 919 12 - 1986Document106 pagesAN PRC 104A - Serv - User - TM11 5820 919 12 - 1986changiz2220No ratings yet
- Equivalent Circuits and Parameters of Power System PlantDocument32 pagesEquivalent Circuits and Parameters of Power System Plantcontact_amit_010% (2)
- Bolt CapacityDocument9 pagesBolt CapacityElias PantaleoNo ratings yet
- Home Construction Budget TemplateDocument2 pagesHome Construction Budget TemplateDan LeucaNo ratings yet
- Packing: Flexible, Resilient, Proven ReliabilityDocument12 pagesPacking: Flexible, Resilient, Proven Reliabilitykeo85No ratings yet
- Provisional Work Completion CertificateDocument5 pagesProvisional Work Completion Certificatekeys.linkNo ratings yet
- UareU SDK2 2PlatformGuideforWindows20121108Document55 pagesUareU SDK2 2PlatformGuideforWindows20121108UrielSandovalBerronesNo ratings yet
- Display ContractDocument35 pagesDisplay ContractSin SeutNo ratings yet
- DB-200Parts Catalog EnglishDocument25 pagesDB-200Parts Catalog Englishvladimir2426No ratings yet
- Recommended Values For Road Rail and BackfillDocument3 pagesRecommended Values For Road Rail and BackfillAnonymous VeDNBhNo ratings yet
- Dali Easy Ii I: Control Unit Operating InstructionsDocument18 pagesDali Easy Ii I: Control Unit Operating InstructionsJacob JosephNo ratings yet
- Jchps 6 (4) 15 Page 286-292 MsreddyDocument7 pagesJchps 6 (4) 15 Page 286-292 MsreddydwahyusafriNo ratings yet
- E-Procurement and E-Logistics ImplementationsDocument24 pagesE-Procurement and E-Logistics ImplementationsKtros MnyorwaNo ratings yet
- Form 1 Science NotesDocument21 pagesForm 1 Science NotesVanaja Mani Selvan100% (1)
- 368 Peepaper (1) PDFDocument9 pages368 Peepaper (1) PDFMark allenNo ratings yet
- OWG000204 Interworking With HLR Data Configuration (IP) - Issue1.1Document32 pagesOWG000204 Interworking With HLR Data Configuration (IP) - Issue1.1Kumaraguru Sathiyaseelan100% (1)
- Workshop Manual D16 Tai Lieu May Thuy Volvo PDFDocument228 pagesWorkshop Manual D16 Tai Lieu May Thuy Volvo PDFLonghuynh Lê100% (2)
- Engleza Maritima 4: 2a-SMCP External ROUTINE Communication - READING Comprehension-Book1Document5 pagesEngleza Maritima 4: 2a-SMCP External ROUTINE Communication - READING Comprehension-Book1dark959595No ratings yet
- What Are Available Drivers in JDBC?: JDBC-ODBC Bridge DriverDocument8 pagesWhat Are Available Drivers in JDBC?: JDBC-ODBC Bridge DriverMohan ChandraNo ratings yet