You might also like
- Functional SafetyDocument8 pagesFunctional SafetyMiceasnagovNo ratings yet
- ISO26262 Automotive safety standard overviewDocument9 pagesISO26262 Automotive safety standard overviewJoseph Kymm100% (5)
- NI - What Is The ISO 26262 Functional Safety StandardDocument5 pagesNI - What Is The ISO 26262 Functional Safety StandardkennyaliveNo ratings yet
- Iso 26262Document6 pagesIso 26262Ghassan Alasmar50% (2)
- What Is The ISO 26262 Functional Safety Standard?: Updated Mar 5, 2019Document8 pagesWhat Is The ISO 26262 Functional Safety Standard?: Updated Mar 5, 2019Marziyeh MoosaviNo ratings yet
- ISO 26262 - Automotive Functional SafetyDocument5 pagesISO 26262 - Automotive Functional SafetyMadhuNo ratings yet
- Automotive Safety and Security Integration ChallengesDocument16 pagesAutomotive Safety and Security Integration ChallengesMalikAlrahabiNo ratings yet
- Embeddedsoftwaredevelopmentforsafety-Criticalsystems PreviewDocument5 pagesEmbeddedsoftwaredevelopmentforsafety-Criticalsystems PreviewScribNo ratings yet
- Applied Sciences: Safety-Oriented System Hardware Architecture Exploration in Compliance With ISO 26262Document29 pagesApplied Sciences: Safety-Oriented System Hardware Architecture Exploration in Compliance With ISO 26262Girish KasturiNo ratings yet
- Applsci 12 05456Document31 pagesApplsci 12 05456velos666No ratings yet
- Iso 26262 Safety Cases: Compliance and Assurance: Rob Palin, David Ward, Ibrahim Habli, Roger RivettDocument6 pagesIso 26262 Safety Cases: Compliance and Assurance: Rob Palin, David Ward, Ibrahim Habli, Roger RivettCom DigfulNo ratings yet
- Guidebook To ISO26262Document18 pagesGuidebook To ISO26262Евгений БульбаNo ratings yet
- ISO 26262 Automotive Functional Safety: Issues and ChallengesDocument13 pagesISO 26262 Automotive Functional Safety: Issues and Challengeslakshmanan.govindan7449No ratings yet
- Tuvsud Iso 26262 ComplianceDocument12 pagesTuvsud Iso 26262 ComplianceIulian MocanuNo ratings yet
- Navigating Safety Standards: ISO 26262 in Diverse Sectors, Contrasted With MIL STD 882E, and A Unified ProposalDocument25 pagesNavigating Safety Standards: ISO 26262 in Diverse Sectors, Contrasted With MIL STD 882E, and A Unified ProposalInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- A Review of The ISO SAE CD 21434 Automotive Cybersecurity Standard 1Document13 pagesA Review of The ISO SAE CD 21434 Automotive Cybersecurity Standard 1Robert Adrian100% (1)
- Evaluation of Safety Cases in The Domain of Automotive EngineeringDocument5 pagesEvaluation of Safety Cases in The Domain of Automotive EngineeringInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Why FS I Road VehiclesDocument33 pagesWhy FS I Road VehiclesAhmed GuevaraNo ratings yet
- ISO 26262: Functional Safety Standard For Modern Road VehiclesDocument15 pagesISO 26262: Functional Safety Standard For Modern Road VehiclesH MORENONo ratings yet
- Functional Safety in Automotive Electronics: Zhang Xinbo, Luo FengDocument8 pagesFunctional Safety in Automotive Electronics: Zhang Xinbo, Luo FengVinoth kumarNo ratings yet
- En 50128 Compliance WPDocument14 pagesEn 50128 Compliance WPGoyal SanjaiNo ratings yet
- 07.TAI Seminar WHAT Is FUNCTIONAL SAFETY BKK 25june2015 HandsoutDocument33 pages07.TAI Seminar WHAT Is FUNCTIONAL SAFETY BKK 25june2015 HandsoutsunithaNo ratings yet
- Design of Micro Controllers For SafetyDocument50 pagesDesign of Micro Controllers For SafetyLuca BeniniNo ratings yet
- A Process To Facilitate Automated Automotive CyberDocument8 pagesA Process To Facilitate Automated Automotive CyberPriyanka VunnamNo ratings yet
- Towards A Security Driven Automotive Development LifecycleDocument22 pagesTowards A Security Driven Automotive Development LifecycleRaviNo ratings yet
- Knowledge and Skills Requirements For The SoftwareDocument8 pagesKnowledge and Skills Requirements For The SoftwareHiếu ĐàmNo ratings yet
- A Review of The ISO SAE CD 21434 Automotive Cybersecurity Standard 1Document13 pagesA Review of The ISO SAE CD 21434 Automotive Cybersecurity Standard 1MOHAMED BOUCHNAKNo ratings yet
- Safecomp MISRA CS FinalDocument12 pagesSafecomp MISRA CS FinalCom DigfulNo ratings yet
- Understanding SIS Design and StandardsDocument2 pagesUnderstanding SIS Design and StandardsAkoKhaledi100% (1)
- Status of The Development of ISO/SAE 21434Document10 pagesStatus of The Development of ISO/SAE 21434Anonymous OyI17C50% (2)
- Automotive Functional Safety = Safety + SecurityDocument10 pagesAutomotive Functional Safety = Safety + SecurityzuzkaNo ratings yet
- Hans-Leo Ross (Auth.) - Functional Safety For Road Vehicles - New Challenges and Solutions For E-Mobility and Automated Driving-Springer International Publishing (2016)Document276 pagesHans-Leo Ross (Auth.) - Functional Safety For Road Vehicles - New Challenges and Solutions For E-Mobility and Automated Driving-Springer International Publishing (2016)asd asdf100% (1)
- Functional Safety Concepts in Motor ControlDocument9 pagesFunctional Safety Concepts in Motor ControlYan LiuNo ratings yet
- Matrix Approach To Perform Dependent Failure Analysis in Compliance With Functional Safety StandardsDocument6 pagesMatrix Approach To Perform Dependent Failure Analysis in Compliance With Functional Safety StandardsDuewee87No ratings yet
- Requirements of ISO 26262Document3 pagesRequirements of ISO 26262IQPC GmbH100% (2)
- Presentation On Standard ISO 26262Document181 pagesPresentation On Standard ISO 26262marris09100% (2)
- Paper 85Document9 pagesPaper 85Enkhbaatar TumenjargalNo ratings yet
- Ljungquist-Thelin2005 Chapter AnIEC62061CompliantSafetySysteDocument15 pagesLjungquist-Thelin2005 Chapter AnIEC62061CompliantSafetySysteNguyễn Thái BảoNo ratings yet
- FMEDA-Based Fault Injection and Data Analysis in Compliance With ISO-26262Document5 pagesFMEDA-Based Fault Injection and Data Analysis in Compliance With ISO-26262Sauvik ChakrabortyNo ratings yet
- ICCVE 2019 PublishedDocument7 pagesICCVE 2019 PublishedGaurang PatniNo ratings yet
- Functional Safety For Mine Hoist-From Lilly To SIL3 Hoist ProtectorDocument20 pagesFunctional Safety For Mine Hoist-From Lilly To SIL3 Hoist ProtectorAndrew PeterNo ratings yet
- ISO 26262 Overview: Achieving Functional SafetyDocument19 pagesISO 26262 Overview: Achieving Functional SafetySrinivasan VenkatNo ratings yet
- Formal Fault Analysis Paperr 11Document8 pagesFormal Fault Analysis Paperr 11Sam HoneyNo ratings yet
- Integrating Machine Learning and AI in Automotive Safety: Enhancing ISO 26262 ComplianceDocument20 pagesIntegrating Machine Learning and AI in Automotive Safety: Enhancing ISO 26262 ComplianceInternational Journal of Innovative Science and Research TechnologyNo ratings yet
- Final Dissertation Industrial Control System Security Effectiveness To Oil and Gas Organizational Performance - FinalDocument72 pagesFinal Dissertation Industrial Control System Security Effectiveness To Oil and Gas Organizational Performance - Finalbrightness419No ratings yet
- Quantified Fault Tree Techniques For Calculating Hardware Fault Metrics According To ISO 26262Document9 pagesQuantified Fault Tree Techniques For Calculating Hardware Fault Metrics According To ISO 26262Hajar RAZIQNo ratings yet
- CCPS LA 2010 SIS EsparzaHochleitnerDocument13 pagesCCPS LA 2010 SIS EsparzaHochleitnerXie ShjNo ratings yet
- Early V&VDocument17 pagesEarly V&VKongala Vamsi KrishnaNo ratings yet
- The 5 GI/ACM Workshop 2020 Scope and Draft Programme On Standardization of Secure and Safe Smart Manufacturing Systems With Respect To IEC 62443 IACSDocument5 pagesThe 5 GI/ACM Workshop 2020 Scope and Draft Programme On Standardization of Secure and Safe Smart Manufacturing Systems With Respect To IEC 62443 IACSCom DigfulNo ratings yet
- FSCAE ISO26262 E AgendaDocument3 pagesFSCAE ISO26262 E Agendanhmphuc1412No ratings yet
- Designing Instrumentation and Control For Process SafetyDocument7 pagesDesigning Instrumentation and Control For Process SafetyAdebamboAinaNo ratings yet
- The UL 4600 Guidebook: What to Include in an Autonomous Vehicle Safety CaseFrom EverandThe UL 4600 Guidebook: What to Include in an Autonomous Vehicle Safety CaseNo ratings yet
- The Safety Critical Systems Handbook: A Straightforward Guide to Functional Safety: IEC 61508 (2010 Edition), IEC 61511 (2015 Edition) and Related GuidanceFrom EverandThe Safety Critical Systems Handbook: A Straightforward Guide to Functional Safety: IEC 61508 (2010 Edition), IEC 61511 (2015 Edition) and Related GuidanceRating: 5 out of 5 stars5/5 (1)
- ERTS2020 Paper 31Document10 pagesERTS2020 Paper 31Ehsan ArbabtaftiNo ratings yet
- Automotive System Safety - 2019 - Miller - Appendix B ISO 26262 Notes On Automotive ImplementationDocument48 pagesAutomotive System Safety - 2019 - Miller - Appendix B ISO 26262 Notes On Automotive ImplementationHariniNo ratings yet
- Determining The Required Safety Integrity Level For Your Process PDFDocument8 pagesDetermining The Required Safety Integrity Level For Your Process PDFfitasmounirNo ratings yet
- ESREL 2019 RAMSS Lifecycle For The Future Vdelivered2Document6 pagesESREL 2019 RAMSS Lifecycle For The Future Vdelivered2Thor MyklebustNo ratings yet
- Pages de VRM - 4510-4Document1 pagePages de VRM - 4510-4pppopNo ratings yet
- Pages de VRM - 4509-2Document1 pagePages de VRM - 4509-2pppopNo ratings yet
- Pages de VRM - 4509-5Document1 pagePages de VRM - 4509-5pppopNo ratings yet
- Pages de VRM - 4509Document1 pagePages de VRM - 4509pppopNo ratings yet
- Pages de VRM - 4509-5Document1 pagePages de VRM - 4509-5pppopNo ratings yet
- Pages de VRM - 4509-2Document1 pagePages de VRM - 4509-2pppopNo ratings yet
- AP-555E Diagrama ElectricoDocument10 pagesAP-555E Diagrama ElectricoCEVegaONo ratings yet
- Pages de CELEX - 32006R1907R (01) - en - TXT-2Document5 pagesPages de CELEX - 32006R1907R (01) - en - TXT-2pppopNo ratings yet
- Pages de CELEX - 32006R1907R (01) - en - TXT-3Document4 pagesPages de CELEX - 32006R1907R (01) - en - TXT-3pppopNo ratings yet
- US20170353146A1Document36 pagesUS20170353146A1pppopNo ratings yet
- NTN Spaw FaqDocument2 pagesNTN Spaw FaqpppopNo ratings yet
- Tsubaki Agriculture Brochure Final VersionDocument28 pagesTsubaki Agriculture Brochure Final VersionpppopNo ratings yet
- BRepubDocument9 pagesBRepubpppopNo ratings yet
- Guide to Standard Truck Trailer DimensionsDocument15 pagesGuide to Standard Truck Trailer DimensionsMauro63No ratings yet
- Consejos para Prevencion de AccidentesDocument40 pagesConsejos para Prevencion de AccidentesSUPER INDUSTRIAL ONLINENo ratings yet
- SabsDocument348 pagesSabsRobert Nicodemus Pelupessy67% (9)
- Madvac LR50e - ExprolinkDocument4 pagesMadvac LR50e - ExprolinkpppopNo ratings yet
- Viscosity GradesDocument1 pageViscosity GradespppopNo ratings yet
- $RTR7ETMDocument2 pages$RTR7ETMpppopNo ratings yet
- SW SetupDocument1 pageSW SetuppppopNo ratings yet
- 246 Portable Balancing InstrumentDocument3 pages246 Portable Balancing InstrumentBenjamin VillegasNo ratings yet
- Reliance Gear Tech DataDocument17 pagesReliance Gear Tech DataMarcos ViniciusNo ratings yet
- Select Proper Gear LubricantDocument6 pagesSelect Proper Gear LubricantpppopNo ratings yet
- Risk Assessment and ManagementDocument54 pagesRisk Assessment and ManagementDika Rahayu Widiana100% (1)
- HIRA For Loading or Unloading ActivityDocument4 pagesHIRA For Loading or Unloading ActivityMD Abdullah100% (2)
- Basic Concept of Hazard Earthquake HazardDocument32 pagesBasic Concept of Hazard Earthquake HazardEunice C. LoyolaNo ratings yet
- OHSE Management Plan GuideDocument43 pagesOHSE Management Plan GuiderumplestilkinsNo ratings yet
- Gerenciamento Do Risco: 150 QuestõesDocument31 pagesGerenciamento Do Risco: 150 QuestõespnorbertoNo ratings yet
- TM1566 John Deere 8875 Skid Steer Loader Technical ManualDocument9 pagesTM1566 John Deere 8875 Skid Steer Loader Technical ManualtteelsarsNo ratings yet
- Chra 3rd Edition ManualDocument23 pagesChra 3rd Edition Manualmhafez1979No ratings yet
- HIRA-Metalic Pipe ErectionDocument13 pagesHIRA-Metalic Pipe ErectionShams Tabrez100% (2)
- RA For TrenchlessDocument23 pagesRA For TrenchlessShashank MehtaNo ratings yet
- JHA Template BlankDocument5 pagesJHA Template BlankChristopher Newby100% (1)
- Environmental Hazards of Outdoor Recreational ActivitiesDocument10 pagesEnvironmental Hazards of Outdoor Recreational ActivitiesBenedict Lumague100% (1)
- Programat P300/G2: Operating InstructionsDocument36 pagesProgramat P300/G2: Operating Instructionsshihap2020738650988No ratings yet
- Nebosh IGC Element 1. Foundations in Health and Safety (Notes)Document7 pagesNebosh IGC Element 1. Foundations in Health and Safety (Notes)kkalvi92% (204)
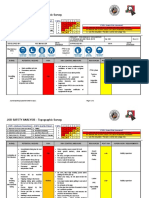
- Topographic Survey JSADocument3 pagesTopographic Survey JSAMoaatazz Nouisri86% (7)
- Environmental Compliance ZEMADocument40 pagesEnvironmental Compliance ZEMALuo MiyandaNo ratings yet
- CSRC PesticidesLists OCT21Document20 pagesCSRC PesticidesLists OCT21Arya GhouzanNo ratings yet
- Operatin Instructions 22299017Document292 pagesOperatin Instructions 22299017syed khalilNo ratings yet
- ROLE OF THE PRIMARY HEALTH Care in DisasterDocument19 pagesROLE OF THE PRIMARY HEALTH Care in Disastermillion assefaNo ratings yet
- 16-20 - Nidm-Retrofit and BasisolationDocument209 pages16-20 - Nidm-Retrofit and BasisolationMohit KohliNo ratings yet
- Risk Assessment For Cable TrayDocument11 pagesRisk Assessment For Cable Traynellaika puspa dewiNo ratings yet
- Humber RefineryDocument2 pagesHumber RefineryRatna Paramitha SariNo ratings yet
- Fire Assessment: Phalguni Singh Vipul JainDocument9 pagesFire Assessment: Phalguni Singh Vipul JainPHALGUNI SINGHNo ratings yet
- Keefer Disastrous ConsequencesDocument25 pagesKeefer Disastrous ConsequencesGiovani VargasNo ratings yet
- PC200LC-6 (USA) Operation ManualDocument255 pagesPC200LC-6 (USA) Operation ManualPHÁT NGUYỄN THẾ100% (1)
- Discharge From Pressure Relief Systems Safety Alert 1678251357Document12 pagesDischarge From Pressure Relief Systems Safety Alert 1678251357mono000No ratings yet
- Control System Integration Project: CONTRACT NO.: EDC 13-228/GC113-036Document8 pagesControl System Integration Project: CONTRACT NO.: EDC 13-228/GC113-036Jayson EscamillanNo ratings yet
- Disaster Management Objectives and PhasesDocument7 pagesDisaster Management Objectives and Phases115 Div -D Sujal PandeyNo ratings yet
- Hazard. Norma Shell. Shell StandardDocument86 pagesHazard. Norma Shell. Shell Standardgustavoemir100% (1)
- Seismic Hazard Assessment Earthquake Risk MitigationDocument3 pagesSeismic Hazard Assessment Earthquake Risk Mitigationgeraldine bustamanteNo ratings yet
- ILNAS-EN 1672-1:2014: Food Processing Machinery - Basic Concepts - Part 1: Safety RequirementsDocument9 pagesILNAS-EN 1672-1:2014: Food Processing Machinery - Basic Concepts - Part 1: Safety RequirementsCarlos SolerNo ratings yet