You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Morales GrokkingDRL V02 Ch1Document34 pagesMorales GrokkingDRL V02 Ch1prem chandran83% (6)
- Ideo MethodDocument4 pagesIdeo MethodVikram ChandraNo ratings yet
- Moral vs. Non-Moral StandardsDocument11 pagesMoral vs. Non-Moral StandardsLynneth L. Maijin80% (5)
- How Entropy and Information Gain Help Decision Trees Split DataDocument10 pagesHow Entropy and Information Gain Help Decision Trees Split Dataprem chandranNo ratings yet
- Cognitive System Day 1 Workshop: - The Overall ArchitectureDocument7 pagesCognitive System Day 1 Workshop: - The Overall Architectureprem chandranNo ratings yet
- The Proposed System: Dialogflow DialogflowDocument5 pagesThe Proposed System: Dialogflow Dialogflowprem chandranNo ratings yet
- Stats Prem HandoutDocument4 pagesStats Prem Handoutprem chandranNo ratings yet
- Cognitive Speech and Vision v1.0Document24 pagesCognitive Speech and Vision v1.0prem chandranNo ratings yet
- Capstone Project Singapore Poly-PREM CHANDRANDocument29 pagesCapstone Project Singapore Poly-PREM CHANDRANprem chandranNo ratings yet
- WWW Analyticsvidhya Com Blog 2019 08 11 Important Model Eval PDFDocument39 pagesWWW Analyticsvidhya Com Blog 2019 08 11 Important Model Eval PDFprem chandranNo ratings yet
- Living On The EdgeDocument10 pagesLiving On The Edgeprem chandranNo ratings yet
- Timetable 2019 Stackable Cert Thrutrain - 050619 - V9.0Document1 pageTimetable 2019 Stackable Cert Thrutrain - 050619 - V9.0prem chandranNo ratings yet
- Fourier Series of Periodic Continuous-Time SignalsDocument15 pagesFourier Series of Periodic Continuous-Time Signalsprem chandranNo ratings yet
- Educational App Development Toolkit For Teachers and LearnersDocument130 pagesEducational App Development Toolkit For Teachers and LearnersIshan AbeywardenaNo ratings yet
- EvaluatingDocument50 pagesEvaluatingprem chandranNo ratings yet
- Lu10 Notes V0.0Document2 pagesLu10 Notes V0.0prem chandranNo ratings yet
- NUS Part Time Master's Timetable Semester 2 2018/2019Document1 pageNUS Part Time Master's Timetable Semester 2 2018/2019prem chandranNo ratings yet
- Article 1Document41 pagesArticle 1prem chandranNo ratings yet
- 5G EbookDocument48 pages5G Ebookanantia100% (1)
- WWW Analyticsvidhya Com Blog 2019 08 11 Important Model Eval PDFDocument39 pagesWWW Analyticsvidhya Com Blog 2019 08 11 Important Model Eval PDFprem chandranNo ratings yet
- Machine Learning Steps 6 DiagramDocument1 pageMachine Learning Steps 6 Diagramprem chandranNo ratings yet
- ASIO4ALL v2 Instruction ManualDocument11 pagesASIO4ALL v2 Instruction ManualDanny_Grafix_1728No ratings yet
- ShodanDocument97 pagesShodanJeanMarcDiCeaNo ratings yet
- Restful API Design SampleDocument13 pagesRestful API Design Sampleprem chandran100% (1)
- LInks To Books and TutorialsDocument1 pageLInks To Books and Tutorialsprem chandranNo ratings yet
- Stats Prem HandoutDocument4 pagesStats Prem Handoutprem chandranNo ratings yet
- ASIO4ALL v2 Instruction ManualDocument11 pagesASIO4ALL v2 Instruction ManualDanny_Grafix_1728No ratings yet
- ASIO4ALL v2 Instruction ManualDocument11 pagesASIO4ALL v2 Instruction ManualDanny_Grafix_1728No ratings yet
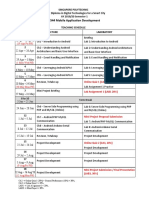
- Singapore Polytechnic Specialist Diploma in Digital Technologies for a Smart City Mobile App Development ScheduleDocument1 pageSingapore Polytechnic Specialist Diploma in Digital Technologies for a Smart City Mobile App Development Scheduleprem chandranNo ratings yet
- Ciml v0 - 8 All Machine LearningDocument189 pagesCiml v0 - 8 All Machine Learningaglobal2100% (2)
- Strength and Weaknesses FolioDocument20 pagesStrength and Weaknesses Folioprem chandranNo ratings yet
- Lecture Notes On Introduction To ProbabilityDocument20 pagesLecture Notes On Introduction To ProbabilityFaryal YounisNo ratings yet
- CHAPTER 13: How To Write A Research ProposalDocument3 pagesCHAPTER 13: How To Write A Research Proposalalia.delareineNo ratings yet
- Middle School Lesson on Risky Decision MakingDocument24 pagesMiddle School Lesson on Risky Decision MakingrichNo ratings yet
- Methods of Inference: Expert Systems: Principles and Programming, Fourth EditionDocument46 pagesMethods of Inference: Expert Systems: Principles and Programming, Fourth EditionVSSainiNo ratings yet
- Classroom Assessment Techniques: Concept Maps for Student UnderstandingDocument2 pagesClassroom Assessment Techniques: Concept Maps for Student UnderstandingMuhammad BabarNo ratings yet
- Nature of Academic Text PDFDocument5 pagesNature of Academic Text PDFMia Dyle MagallanesNo ratings yet
- The Role of Management and Trade Union Leadership On Dual Commitment: The Mediating Effect of The Workplace Relations ClimateDocument18 pagesThe Role of Management and Trade Union Leadership On Dual Commitment: The Mediating Effect of The Workplace Relations ClimateSK KHURANSAINo ratings yet
- Statistics LectureDocument35 pagesStatistics LectureEPOY JERSNo ratings yet
- Horkheimer and Neurath: Restarting A Disrupted Debate: John O'Neill and Thomas UebelDocument31 pagesHorkheimer and Neurath: Restarting A Disrupted Debate: John O'Neill and Thomas Uebelanti ramirezNo ratings yet
- Alteration of Scientology Materials ReportDocument230 pagesAlteration of Scientology Materials Reportsirjsslut50% (2)
- Solucionario Econometria Jeffrey M Wooldridge PDFDocument4 pagesSolucionario Econometria Jeffrey M Wooldridge PDFMartín Cruzat Riquelme0% (1)
- Basics of Biomechanics PDFDocument228 pagesBasics of Biomechanics PDFVarun Kumar100% (1)
- Ananda Coomaraswamy - Dhamma WheelDocument13 pagesAnanda Coomaraswamy - Dhamma WheelDark Cocaine100% (1)
- Carl Jung: 3 Levels of ConsciousnessDocument7 pagesCarl Jung: 3 Levels of ConsciousnessDerechos HumanosNo ratings yet
- Characteristic Values of Geotechnical Parameters in Eurocode 7Document11 pagesCharacteristic Values of Geotechnical Parameters in Eurocode 7mcfontyNo ratings yet
- Summative Test 2 - TunayDocument2 pagesSummative Test 2 - TunayCharina Ortiz100% (1)
- The Elliott Wave Theory - PTN Weekly ChartDocument8 pagesThe Elliott Wave Theory - PTN Weekly ChartivopiskovNo ratings yet
- Impact of Corporate Social Responsibility On Consumer Based Brand Equity in FMCG Industry of PakistanDocument31 pagesImpact of Corporate Social Responsibility On Consumer Based Brand Equity in FMCG Industry of PakistanMairaj AhmedNo ratings yet
- Computer College Calamba Campus: Bachelor of Science in Business AdministrationDocument5 pagesComputer College Calamba Campus: Bachelor of Science in Business AdministrationAnti VirusNo ratings yet
- Experimental Psychology QuizDocument24 pagesExperimental Psychology QuizDaniel John ArboledaNo ratings yet
- Module 5 - Derivatives of Inv Trig FunctionsDocument6 pagesModule 5 - Derivatives of Inv Trig FunctionsMaria Andres100% (1)
- HeheDocument6 pagesHeheJohn ReyNo ratings yet
- A1409845388 - 23806 - 19 - 2018 - Reasoning Aptitude PDFDocument70 pagesA1409845388 - 23806 - 19 - 2018 - Reasoning Aptitude PDFSaurav SumanNo ratings yet
- Lesson 4Document23 pagesLesson 4Czarina Pauline CunananNo ratings yet
- Manufacturer's electric bulb batch testing resultsDocument27 pagesManufacturer's electric bulb batch testing resultsashutosh100% (1)
- Detailed Lesson Plan (DLP) Format: Instructional PlanningDocument2 pagesDetailed Lesson Plan (DLP) Format: Instructional PlanningReynalyn HernandezNo ratings yet
- Confidence Intervals Survey ProportionsDocument3 pagesConfidence Intervals Survey ProportionsDania Bandojo100% (1)