You might also like
- Fuzzy+PID Attitude Control of A Co-Axial OctocopterDocument6 pagesFuzzy+PID Attitude Control of A Co-Axial OctocopterVikNo ratings yet
- Control Third Orders MCDocument18 pagesControl Third Orders MCMebaye BeleteNo ratings yet
- Quadcopter Attitude and Thrust Simulation Based On Simulink PlatformDocument6 pagesQuadcopter Attitude and Thrust Simulation Based On Simulink PlatformOLANIYINo ratings yet
- Modeling and Backstepping-Based Nonlinear ControlDocument9 pagesModeling and Backstepping-Based Nonlinear Controloussama sadkiNo ratings yet
- Dead Reckoning and Kalman Filter Design For Trajectory Tracking of A QuadrotorDocument6 pagesDead Reckoning and Kalman Filter Design For Trajectory Tracking of A QuadrotorRifqi ZainNo ratings yet
- Mathematical Modelling and Attitude Control of Quadcopter Based On Classical ControllerDocument7 pagesMathematical Modelling and Attitude Control of Quadcopter Based On Classical ControllerdrenridaNo ratings yet
- 13 Reza2 ACEDocument6 pages13 Reza2 ACEGál Károly-IstvánNo ratings yet
- Inverse Dynamics Based Altitude/Attitude Control and Stabilization of A Quadrotor UAVDocument5 pagesInverse Dynamics Based Altitude/Attitude Control and Stabilization of A Quadrotor UAVashebir berhanuNo ratings yet
- PID vs. MRAC Control Techniques Applied To A Quadrotor's AttitudeDocument2 pagesPID vs. MRAC Control Techniques Applied To A Quadrotor's AttitudeYessica RosasNo ratings yet
- Art GarciaSalazarDocument32 pagesArt GarciaSalazarGiang BùiNo ratings yet
- Control Methods For Quadrotors StabilityDocument16 pagesControl Methods For Quadrotors StabilityThien MaiNo ratings yet
- Attitude Stabilization of A Vtol Quadrotor Aircraft: Abdelhamid Tayebi and Stephen McgilvrayDocument10 pagesAttitude Stabilization of A Vtol Quadrotor Aircraft: Abdelhamid Tayebi and Stephen McgilvrayLin Shenghuai CalvinNo ratings yet
- 1 s2.0 S1270963815002679 MainDocument7 pages1 s2.0 S1270963815002679 MainIslem TlbNo ratings yet
- Quadcopter Math Model (Amazing)Document26 pagesQuadcopter Math Model (Amazing)Joseph Oberholtzer83% (6)
- Dynamic Modelling and Experimental Identification of Four Rotors Helicopter ParametersDocument7 pagesDynamic Modelling and Experimental Identification of Four Rotors Helicopter Parametersali.azim1380No ratings yet
- Heba ElKholy Thesis S2014Document13 pagesHeba ElKholy Thesis S2014AlexandraAndreeaNo ratings yet
- Coaxial CFDDocument7 pagesCoaxial CFDMaximNo ratings yet
- Real-Time Stabilization and Tracking of A Four Rotor Mini-RotorcraftDocument6 pagesReal-Time Stabilization and Tracking of A Four Rotor Mini-RotorcraftMiguelDelBarrioIglesisasNo ratings yet
- Agri-Drone Recoil PDFDocument10 pagesAgri-Drone Recoil PDFChiru knNo ratings yet
- RHO-based Convex Optimization Method Applied To CooperativeDocument6 pagesRHO-based Convex Optimization Method Applied To Cooperativemarion.martin031995No ratings yet
- Paper FinalDocument7 pagesPaper Finalali rajaNo ratings yet
- Altitude Control of Quadrotor Using Fuzzy Self Tuning PID ControllerDocument6 pagesAltitude Control of Quadrotor Using Fuzzy Self Tuning PID ControllerkalataNo ratings yet
- Euler and Quaternion ParameterizationDocument5 pagesEuler and Quaternion ParameterizationhugoNo ratings yet
- Attitude Stabilization of Quadrotor Uav Using Backstepping Fuzzy Logic & Backstepping Least-Mean-Square Controllersal-Younes2008Document11 pagesAttitude Stabilization of Quadrotor Uav Using Backstepping Fuzzy Logic & Backstepping Least-Mean-Square Controllersal-Younes2008Pedro Cezar Rodrigues BaltazarNo ratings yet
- Fusing Ultra-Wideband Range Measurements With Accelerometers and Rate Gyroscopes For Quadrocopter State EstimationDocument7 pagesFusing Ultra-Wideband Range Measurements With Accelerometers and Rate Gyroscopes For Quadrocopter State EstimationManuel MaioranoNo ratings yet
- Brescianini Hehn Dandrea Pole AcrobaticsDocument8 pagesBrescianini Hehn Dandrea Pole AcrobaticsdflamsheepsNo ratings yet
- Robust Block Second Order Sliding Mode Control For A QuadrotorDocument21 pagesRobust Block Second Order Sliding Mode Control For A Quadrotorelguerrero66No ratings yet
- Step by Step Robust Nonlinear PI For Attitude Stabilisation of A Four-Rotor Mini-AircraftDocument8 pagesStep by Step Robust Nonlinear PI For Attitude Stabilisation of A Four-Rotor Mini-AircraftSyed MamnoonNo ratings yet
- Euler and Quaternion Parameterization in VTOL UAVDocument5 pagesEuler and Quaternion Parameterization in VTOL UAVNoor DullaertNo ratings yet
- Design and Optimization of Backstepping Controller For An Underactuated Autonomous Quadrotor Unmanned Aerial VehicleDocument18 pagesDesign and Optimization of Backstepping Controller For An Underactuated Autonomous Quadrotor Unmanned Aerial VehicleSteve DemirelNo ratings yet
- Simulation of Spacecraft Attitude and Orbit DynamicsDocument6 pagesSimulation of Spacecraft Attitude and Orbit DynamicsDan PhanNo ratings yet
- Dinuka ICUMT2010Document7 pagesDinuka ICUMT2010Lacci123No ratings yet
- Article 69Document5 pagesArticle 69Krishna P. YadavNo ratings yet
- Euler Angles and Quaternions inDocument75 pagesEuler Angles and Quaternions inGustavo Rothmund BolfeNo ratings yet
- Geometric Control ProofDocument8 pagesGeometric Control Proof李金良No ratings yet
- Sensor Fusion For Attitude Estimation and PID Control of Quadrotor UAVDocument8 pagesSensor Fusion For Attitude Estimation and PID Control of Quadrotor UAVSemih AteşNo ratings yet
- PID VS: LQ Control Techniques Applied To An Indoor Micro QuadrotorDocument6 pagesPID VS: LQ Control Techniques Applied To An Indoor Micro QuadrotorMikoto RifkyNo ratings yet
- 10.2478 - Sbeef 2022 0018Document6 pages10.2478 - Sbeef 2022 0018Sudh Desi ContentsNo ratings yet
- PID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorDocument6 pagesPID Vs LQ Control Techniques Applied To An Indoor Micro QuadrotorAlexandreSidantNo ratings yet
- Indecs2016 pp88 100Document14 pagesIndecs2016 pp88 100millionNo ratings yet
- Hexacopter ControlDocument9 pagesHexacopter Control陳昱文No ratings yet
- Second Order Sliding Mode Control For A Quadrotor UAVDocument7 pagesSecond Order Sliding Mode Control For A Quadrotor UAVAhtisham195No ratings yet
- A Study On The Modeling of A Hexacopter: December 2015Document9 pagesA Study On The Modeling of A Hexacopter: December 2015nkofodileNo ratings yet
- 2020 - Fail-Safe Controller Architectures For Quadcopter With Motor FailuresDocument7 pages2020 - Fail-Safe Controller Architectures For Quadcopter With Motor FailuresterenceNo ratings yet
- Fault Tolerant Control of A Quadrotor UAV Using Sliding Mode ControlDocument6 pagesFault Tolerant Control of A Quadrotor UAV Using Sliding Mode ControladilsondissoNo ratings yet
- Hexacopter Using MATLAB Simulink and MPUDocument5 pagesHexacopter Using MATLAB Simulink and MPUMariana MartínezNo ratings yet
- Adaptive Optimal Path Following For High Wind FlightsDocument6 pagesAdaptive Optimal Path Following For High Wind FlightsirqoviNo ratings yet
- Er Giner 2012 VtolDocument10 pagesEr Giner 2012 VtolAtharva SalunkheNo ratings yet
- Dynamics Modelling and Linear Control of QuadcopterDocument6 pagesDynamics Modelling and Linear Control of QuadcopterBrilian Putra AmiruddinNo ratings yet
- Modeling and Fuzzy Logic Control of A Quadrotor UAVDocument5 pagesModeling and Fuzzy Logic Control of A Quadrotor UAVAnonymous kw8Yrp0R5rNo ratings yet
- ModelingandControlofX ShapeQuadcopterDocument13 pagesModelingandControlofX ShapeQuadcopterዮናስNo ratings yet
- Backstepping Based PID Control Strategy For An Underactuated Aerial RobotDocument6 pagesBackstepping Based PID Control Strategy For An Underactuated Aerial RobotCésar DiazNo ratings yet
- Robust LQR Controller Design For Stabilizing and Trajectory Tracking of Inverted Pendulum PDFDocument10 pagesRobust LQR Controller Design For Stabilizing and Trajectory Tracking of Inverted Pendulum PDFS JNo ratings yet
- Robot Manipulators: Modeling, Performance Analysis and ControlFrom EverandRobot Manipulators: Modeling, Performance Analysis and ControlNo ratings yet
- Stability and Control of Airplanes and HelicoptersFrom EverandStability and Control of Airplanes and HelicoptersRating: 5 out of 5 stars5/5 (1)
- Mechanics: Problems in Undergraduate PhysicsFrom EverandMechanics: Problems in Undergraduate PhysicsRating: 3.5 out of 5 stars3.5/5 (2)
- Spacecraft Dynamics and Control: The Embedded Model Control ApproachFrom EverandSpacecraft Dynamics and Control: The Embedded Model Control ApproachRating: 5 out of 5 stars5/5 (1)
- Guide to Three Dimensional Structure and Motion FactorizationFrom EverandGuide to Three Dimensional Structure and Motion FactorizationNo ratings yet
- Rotational Spectra and Molecular Structure: Physical Chemistry: A Series of MonographsFrom EverandRotational Spectra and Molecular Structure: Physical Chemistry: A Series of MonographsNo ratings yet
- Chapter 3 TheoriesDocument14 pagesChapter 3 TheoriesAsad AsifNo ratings yet
- Chapter 2 Globalization & Nation StateDocument11 pagesChapter 2 Globalization & Nation StateAsad AsifNo ratings yet
- Chapter 1Document11 pagesChapter 1Asad AsifNo ratings yet
- Smart Image Processing RobotDocument75 pagesSmart Image Processing RobotAsad AsifNo ratings yet
- Power Factor Thesis ReportDocument70 pagesPower Factor Thesis ReportAsad AsifNo ratings yet
- Auto Power Factor Correction PresentationDocument22 pagesAuto Power Factor Correction PresentationAsad AsifNo ratings yet
- Automatic Power Factor Correction Using Pic Microcontroller With Android DisplayDocument92 pagesAutomatic Power Factor Correction Using Pic Microcontroller With Android DisplayAsad AsifNo ratings yet
- Automatic Power Factor Correction Using Pic Microcontroller With Android DisplayDocument92 pagesAutomatic Power Factor Correction Using Pic Microcontroller With Android DisplayAsad AsifNo ratings yet
- Design CalculationDocument13 pagesDesign CalculationSunil KumarNo ratings yet
- Cswip QuestionDocument3 pagesCswip Questionfasith9534No ratings yet
- Ohlins Tool Manual 2017Document46 pagesOhlins Tool Manual 2017Pier o.f.r.No ratings yet
- Bioreactor Design: Mata Kuliah: Pengantar Teknologi BioprosesDocument33 pagesBioreactor Design: Mata Kuliah: Pengantar Teknologi BioprosesyassinharanNo ratings yet
- Practical Application of Pervious Concrete - Mix Designs That Are WorkableDocument20 pagesPractical Application of Pervious Concrete - Mix Designs That Are WorkablePJ FlexirNo ratings yet
- How Iso 27001 Compliance Is Impossible Without Privileged Management Technical Brief 17076Document8 pagesHow Iso 27001 Compliance Is Impossible Without Privileged Management Technical Brief 17076George VardangalosNo ratings yet
- Statement of AccountDocument45 pagesStatement of AccountSARAVANAN KESAVANNo ratings yet
- Qus Mod 4.2 PCBDocument14 pagesQus Mod 4.2 PCBJagbir SinghNo ratings yet
- Cs6212 Programming and Data Structures Laboratory I Laboratory ManualDocument28 pagesCs6212 Programming and Data Structures Laboratory I Laboratory Manualprasath_676303No ratings yet
- BSS Steel Guide CataloguesDocument52 pagesBSS Steel Guide Cataloguessaber66No ratings yet
- Sir VisvesvarayyaDocument1 pageSir VisvesvarayyaJohn SparrowNo ratings yet
- MK Conveyor Technology 5.0Document484 pagesMK Conveyor Technology 5.0Samuel Getaneh TNo ratings yet
- GSM 06 InterfacesDocument17 pagesGSM 06 Interfacesamitcool26No ratings yet
- CrcwikiDocument8 pagesCrcwikiPratik MahajanNo ratings yet
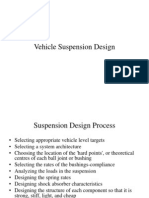
- Vehicle Suspension DesignDocument63 pagesVehicle Suspension DesignVenkatesh ChegireddyNo ratings yet
- Cd300m Parts BreakdownDocument10 pagesCd300m Parts BreakdownAmanda FitzgeraldNo ratings yet
- ITW Rust Inhibitive Primer 7CZ Product Data 1469103Document2 pagesITW Rust Inhibitive Primer 7CZ Product Data 1469103rihtak123No ratings yet
- EC160B/180B/210B/240B/290B/360B/460B: Click The Volvo-Logo in The Lower Right Corner To Return To This Menu Main MenuDocument31 pagesEC160B/180B/210B/240B/290B/360B/460B: Click The Volvo-Logo in The Lower Right Corner To Return To This Menu Main MenuMACHINERY101GEAR97% (71)
- Liquid Ring Vacuum Pump: LPH 55312, LPH 55316, LPH 55320Document12 pagesLiquid Ring Vacuum Pump: LPH 55312, LPH 55316, LPH 55320Edu CordonNo ratings yet
- PMAC720Document3 pagesPMAC720felipeNo ratings yet
- WAHLER Imagebroschuere SERIE enDocument16 pagesWAHLER Imagebroschuere SERIE ensagarpatel337No ratings yet
- Peri Up Flex Core ComponentsDocument50 pagesPeri Up Flex Core ComponentsDavid BourcetNo ratings yet
- Fund PoroDocument97 pagesFund PoroAgustín Ramos LópezNo ratings yet
- Man D28Document44 pagesMan D28Jorge Barradas Osorno100% (1)
- Agri Brochure PDFDocument20 pagesAgri Brochure PDFMichaelNo ratings yet
- Under Balanced OperationsDocument104 pagesUnder Balanced OperationsJavier Ignacio Meriles100% (1)
- RSAFRAMEDocument2 pagesRSAFRAMETIOCA01No ratings yet
- Red MarsDocument16 pagesRed Marsfz.fathima50% (2)
- Google Gender Pay LawsuitDocument31 pagesGoogle Gender Pay LawsuitUSA TODAYNo ratings yet
- JSA Basket TransferDocument3 pagesJSA Basket TransferCristina Rican100% (1)