You might also like
- Ponniyin SelvanDocument1,495 pagesPonniyin Selvantaskchennai200690% (10)
- Literature ReviewDocument1 pageLiterature ReviewYAZHININo ratings yet
- Gate Sample QuestionDocument2 pagesGate Sample QuestionYAZHININo ratings yet
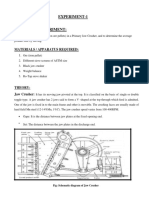
- Experiment-1: Materials / Apparatus RequiredDocument5 pagesExperiment-1: Materials / Apparatus RequiredYAZHININo ratings yet
- Gate Sample QuestionDocument2 pagesGate Sample QuestionYAZHININo ratings yet
- Limit State Design What Is Limit State?Document4 pagesLimit State Design What Is Limit State?YAZHININo ratings yet
- Gate Sample QuestionDocument2 pagesGate Sample QuestionYAZHININo ratings yet
- Design of Concrete StructuresDocument10 pagesDesign of Concrete StructuresYAZHININo ratings yet
- AstmDocument1 pageAstmYAZHININo ratings yet
- Journal ListDocument4 pagesJournal ListYAZHININo ratings yet
- Design of Concrete StructuresDocument10 pagesDesign of Concrete StructuresYAZHININo ratings yet
- Unit-I - Limit State Method Concept and Design of Beams: 1. MaterialsDocument7 pagesUnit-I - Limit State Method Concept and Design of Beams: 1. MaterialsYAZHININo ratings yet
- Oisd STD-141Document31 pagesOisd STD-141Jyotsana Rawat83% (6)
- LSD ConceptsDocument19 pagesLSD ConceptsYAZHININo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Mender MouradDocument15 pagesMender Mouradghassen laouiniNo ratings yet
- Vsi CNG EnglishDocument4 pagesVsi CNG Englishbenjohn100No ratings yet
- Abb Acs800 Crane Control Manualn697 PDFDocument340 pagesAbb Acs800 Crane Control Manualn697 PDFDaniel Tando100% (1)
- Series: Output Power S1500 S2000 S3000 S4000 S6000 S3004 S4004 S4044 S6004 S6044 Weight DepthDocument2 pagesSeries: Output Power S1500 S2000 S3000 S4000 S6000 S3004 S4004 S4044 S6004 S6044 Weight DepthАлексей АндрияшNo ratings yet
- Sensor Capacitivo Omron E2k-CDocument8 pagesSensor Capacitivo Omron E2k-CClaudiney de SantanaNo ratings yet
- Plexi SE PCB VJ Conversion Parts List v2Document1 pagePlexi SE PCB VJ Conversion Parts List v2Yann RossiNo ratings yet
- Cdma2000 1xRTTDocument19 pagesCdma2000 1xRTTvijay_786No ratings yet
- Data SheetDocument3 pagesData Sheetcontrol9050No ratings yet
- Emcomm Ham Radio PDFDocument170 pagesEmcomm Ham Radio PDFMichael Yurkovich100% (1)
- ERRATA Rabaey, Chandrakasan - Digital Integrated CircuitsDocument4 pagesERRATA Rabaey, Chandrakasan - Digital Integrated CircuitsbeppesNo ratings yet
- Manual Back-Ups Rs 1000Document115 pagesManual Back-Ups Rs 1000geniusppangNo ratings yet
- Decimal To BC-Encoder V2Document10 pagesDecimal To BC-Encoder V2Anurag RoyNo ratings yet
- Water Quality Monitoring and Notification System U PDFDocument4 pagesWater Quality Monitoring and Notification System U PDFMukund KumarNo ratings yet
- Spring 2 1 DocumentationDocument7 pagesSpring 2 1 DocumentationMarcoNo ratings yet
- 1 Auxilliary Equipment - US PricingDocument132 pages1 Auxilliary Equipment - US PricingOscar EspitiaNo ratings yet
- CMOS Three Axis Hall Sensor and Joystick Application Schott3axisJoystickDocument4 pagesCMOS Three Axis Hall Sensor and Joystick Application Schott3axisJoystickbesttv046936No ratings yet
- SC-CH4 Manual - Eng - 25 - 09 - 2012Document29 pagesSC-CH4 Manual - Eng - 25 - 09 - 2012Lý Chính ĐạoNo ratings yet
- High Voltage and Ustable States of MatterDocument21 pagesHigh Voltage and Ustable States of MatterSyedTamkanatMunirNo ratings yet
- MCM - RVSM - SbjaDocument58 pagesMCM - RVSM - SbjaDee LoweNo ratings yet
- Storageworks Msa1000Document52 pagesStorageworks Msa1000Hari RamadhaniNo ratings yet
- VRM 8.3 DC-DC Converter Design Guidelines: Order Number: 243870-004Document15 pagesVRM 8.3 DC-DC Converter Design Guidelines: Order Number: 243870-004draNo ratings yet
- CEMU Game CompatabilityDocument140 pagesCEMU Game CompatabilityJohnny OrdoñezNo ratings yet
- 4 NetworkDocument6 pages4 Networkapi-371092170No ratings yet
- Sco Ibms-Technical SpecificationDocument116 pagesSco Ibms-Technical SpecificationShameel PtNo ratings yet
- d296 d297 Installation Manual - Fotobeam BoschDocument16 pagesd296 d297 Installation Manual - Fotobeam BoschChristian CristãoNo ratings yet
- Shield Ekg Emg Rev B SchematicDocument1 pageShield Ekg Emg Rev B SchematicwidyarahmahNo ratings yet
- Microwave BitsDocument104 pagesMicrowave BitsMurali KrishnaNo ratings yet
- Mod 1Document64 pagesMod 1kallista.antenorNo ratings yet
- GL 112 Cam Analysis ApparatusDocument6 pagesGL 112 Cam Analysis ApparatusNathi Dan MasekoNo ratings yet
- E Jac ManualDocument10 pagesE Jac ManualJhon Elier Arango TrillosNo ratings yet