You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Increase Youtube SubscribersDocument30 pagesIncrease Youtube Subscribers4ktazekahveNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Gantry Girder Design ExampleDocument17 pagesGantry Girder Design ExamplePrantik Maity100% (1)
- Cell Transport WorksheetDocument2 pagesCell Transport WorksheetVictoria Niño D100% (1)
- Escrow AgreementDocument3 pagesEscrow Agreementmadelyn sarmientaNo ratings yet
- McMillan 2007. Fish - Histology PDFDocument603 pagesMcMillan 2007. Fish - Histology PDFMarcela Mesa100% (1)
- Checklist For 3D Model ReviewDocument9 pagesChecklist For 3D Model ReviewMONER MANUS100% (1)
- Digital Systems Design and PrototypingDocument633 pagesDigital Systems Design and PrototypingAshish Shrivastava50% (2)
- Itachuna Rajbari: All Item Depending Upon Availability and PriceDocument1 pageItachuna Rajbari: All Item Depending Upon Availability and PricePrantik MaityNo ratings yet
- Solutions and Solubility Practice Hon-18Document3 pagesSolutions and Solubility Practice Hon-18api-368121935No ratings yet
- Static Var CompensatorDocument29 pagesStatic Var CompensatorCarlos Fabian GallardoNo ratings yet
- Angeles, Rea P - Unit 1 - Methods in Teaching Industrial ArtsDocument2 pagesAngeles, Rea P - Unit 1 - Methods in Teaching Industrial ArtsEthel Rose SorianoNo ratings yet
- Sample Qs Chap 18Document4 pagesSample Qs Chap 18Prantik MaityNo ratings yet
- Lab 6 - TriaxialCompressionTestDocument13 pagesLab 6 - TriaxialCompressionTestPrantik MaityNo ratings yet
- Reviewed - Document 31Document21 pagesReviewed - Document 31Prantik MaityNo ratings yet
- Review Simultaneous Equations AdvancedDocument6 pagesReview Simultaneous Equations AdvancedPrantik MaityNo ratings yet
- Pearson Edexcel Level 1level 2 GCSE (9 - 1)Document22 pagesPearson Edexcel Level 1level 2 GCSE (9 - 1)Prantik MaityNo ratings yet
- Lab 2 - Constant-FallingHead Permeability TestDocument10 pagesLab 2 - Constant-FallingHead Permeability TestPrantik MaityNo ratings yet
- Dokumen - Tips API 1102 Pipelines Crossing Railroad HighwayspdfDocument52 pagesDokumen - Tips API 1102 Pipelines Crossing Railroad HighwayspdfPrantik MaityNo ratings yet
- Department of Molecular Biology. Covid 19 Test Name Result Unit Bio. Ref. Range MethodDocument2 pagesDepartment of Molecular Biology. Covid 19 Test Name Result Unit Bio. Ref. Range MethodPrantik MaityNo ratings yet
- Lab 4 - ConsolidationTestDocument8 pagesLab 4 - ConsolidationTestPrantik MaityNo ratings yet
- Lab 1 - CompactionDocument5 pagesLab 1 - CompactionPrantik MaityNo ratings yet
- Nptel Wave PropagationDocument11 pagesNptel Wave PropagationPrantik MaityNo ratings yet
- Spectral Analysis of Surface Waves (Sasw) : Prantik MaityDocument22 pagesSpectral Analysis of Surface Waves (Sasw) : Prantik MaityPrantik MaityNo ratings yet
- Pipe EncasementDocument1 pagePipe EncasementPrantik MaityNo ratings yet
- SASW Test Procedure 3Document4 pagesSASW Test Procedure 3Prantik MaityNo ratings yet
- SASW Test Procedure 1Document2 pagesSASW Test Procedure 1Prantik MaityNo ratings yet
- SASW Test Procedure 2Document2 pagesSASW Test Procedure 2Prantik MaityNo ratings yet
- Solar System Tests of Brane World Models: Christian G. B OhmerDocument14 pagesSolar System Tests of Brane World Models: Christian G. B OhmerPrantik MaityNo ratings yet
- P. G. Bergmann Et Al. (Eds.), Topological Properties and Global Structure of Space-Time © Springer Science+Business Media New York 1986Document2 pagesP. G. Bergmann Et Al. (Eds.), Topological Properties and Global Structure of Space-Time © Springer Science+Business Media New York 1986Prantik MaityNo ratings yet
- Family of NumbersDocument5 pagesFamily of NumbersPrantik MaityNo ratings yet
- Site Characterization Using Spectral Analysis of Surface Waves (Sasw)Document24 pagesSite Characterization Using Spectral Analysis of Surface Waves (Sasw)Prantik MaityNo ratings yet
- RONPD SATK Form Initial Application of LTO 1.3Document5 pagesRONPD SATK Form Initial Application of LTO 1.3ArdenNo ratings yet
- DLL - July 15 - Idiomatic ExpressionsDocument2 pagesDLL - July 15 - Idiomatic ExpressionsLenlen Santos Catinoy100% (1)
- Health Assessment of Structures PaperDocument4 pagesHealth Assessment of Structures PaperNirmal ModyNo ratings yet
- Lab Report# 07: To Analyze The Effect of Parallel Compensation On Reactive Power Flow of Transmission LineDocument11 pagesLab Report# 07: To Analyze The Effect of Parallel Compensation On Reactive Power Flow of Transmission Linemuhammad irfanNo ratings yet
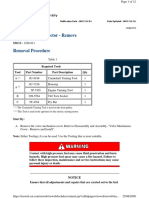
- Electronic Unit Injector - Remove: C6.6 Industrial EngineDocument12 pagesElectronic Unit Injector - Remove: C6.6 Industrial EngineBassieNo ratings yet
- Uponor v. Sioux Chief Mfg.Document5 pagesUponor v. Sioux Chief Mfg.PriorSmartNo ratings yet
- Part - I: Subjective Questions: Introduction To ChemistryDocument7 pagesPart - I: Subjective Questions: Introduction To ChemistryMohini DeviNo ratings yet
- Aileen Flores Lesson Plan 2021Document8 pagesAileen Flores Lesson Plan 2021Sissay SemblanteNo ratings yet
- Latihan SoalDocument7 pagesLatihan SoaljuliaNo ratings yet
- Higher Education Loans Board: Loan Disbursement ReportDocument2 pagesHigher Education Loans Board: Loan Disbursement ReportEdward KalvisNo ratings yet
- Irfan Byna Nur Akbar MT PresentationDocument14 pagesIrfan Byna Nur Akbar MT PresentationirfanNo ratings yet
- Seward Stomacher 400Document2 pagesSeward Stomacher 400ugomiesterNo ratings yet
- Natal Chart (Data Sheet) : Jul - Day 2442664.865117 TT, T 46.1 SecDocument1 pageNatal Chart (Data Sheet) : Jul - Day 2442664.865117 TT, T 46.1 SecДеан ВеселиновићNo ratings yet
- GP-100 Software User Guide This Software Only Supports Windows SystemDocument1 pageGP-100 Software User Guide This Software Only Supports Windows SystemJohn HenryNo ratings yet
- Social Customer Relationship Management (SCRM) - Application and TechnologyDocument9 pagesSocial Customer Relationship Management (SCRM) - Application and TechnologyThu TrangNo ratings yet
- Inside Job PDFDocument87 pagesInside Job PDFAriel MarascalcoNo ratings yet
- New Alternatives For Continuity Plates in I-Beam To Box ColumnsDocument15 pagesNew Alternatives For Continuity Plates in I-Beam To Box ColumnstaosyeNo ratings yet
- GSE580Document132 pagesGSE580Anonymous g4wR41qNeNo ratings yet
- Cat-Eht Brake New PDFDocument4 pagesCat-Eht Brake New PDFLingaraj Suresh LingaianNo ratings yet
- Soc 617Document9 pagesSoc 617bilal.salaamNo ratings yet
- Assessment IG 6 - Sem 2 - Informal LetterDocument6 pagesAssessment IG 6 - Sem 2 - Informal Lettersuruchi dhingraNo ratings yet