You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Leedshine 42HS03 Stepper Motor DatasheetDocument3 pagesLeedshine 42HS03 Stepper Motor DatasheetIonica VladNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Mxurrxu PDFDocument11 pagesMxurrxu PDFKevinNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- PDFDocument7 pagesPDFKevinNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Citation 272494109Document1 pageCitation 272494109KevinNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- PDFDocument7 pagesPDFKevinNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- A4979 Datasheet PDFDocument44 pagesA4979 Datasheet PDFKevinNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
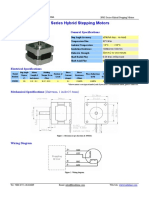
- 39HS Series Hybrid Stepping Motors: General SpecificationsDocument1 page39HS Series Hybrid Stepping Motors: General SpecificationsKevinNo ratings yet
- Petri Net Model and Reliability Evaluation For WinDocument20 pagesPetri Net Model and Reliability Evaluation For WinKevinNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- rezumatulWEB OpaginaDocument1 pagerezumatulWEB OpaginaKevinNo ratings yet
- FSDFSDDocument4 pagesFSDFSDKevinNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- rezumatulWEB OpaginaDocument1 pagerezumatulWEB OpaginaKevinNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Fast Simulation of Power Electronics and Electrical Drives with Caspoc 2003Document70 pagesFast Simulation of Power Electronics and Electrical Drives with Caspoc 2003KevinNo ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- FSDFSDDocument4 pagesFSDFSDKevinNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Caspoc PDFDocument56 pagesCaspoc PDFRahulNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Remotely Operated Underwater Vehicle (ROV) 100% Report: EML 4905 Senior Design ProjectDocument40 pagesRemotely Operated Underwater Vehicle (ROV) 100% Report: EML 4905 Senior Design ProjectKevinNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Getting Started Simulation Research: CASPOCDocument18 pagesGetting Started Simulation Research: CASPOCKevinNo ratings yet
- Distributed Generation and Renewables: Power Quality and Utilisation GuideDocument14 pagesDistributed Generation and Renewables: Power Quality and Utilisation GuideKevinNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Formularul F3 - ConducteDocument5 pagesFormularul F3 - ConducteKevinNo ratings yet
- US Navy Course NAVEDTRA 14103 - Fire Control Man Volume 6-Digital CommunicationsDocument152 pagesUS Navy Course NAVEDTRA 14103 - Fire Control Man Volume 6-Digital CommunicationsGeorgesNo ratings yet
- Getting Started Simulation Research: CASPOCDocument18 pagesGetting Started Simulation Research: CASPOCKevinNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Fast Simulation of Power Electronics and Electrical Drives with Caspoc 2003Document70 pagesFast Simulation of Power Electronics and Electrical Drives with Caspoc 2003KevinNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Caspoc PDFDocument56 pagesCaspoc PDFRahulNo ratings yet
- Ohm's Law - PowerDocument9 pagesOhm's Law - PowerbaczonifNo ratings yet
- Lessons in Electronic Circuits VIDocument374 pagesLessons in Electronic Circuits VITugas100% (11)
- 69NT40 - 551 - 500 TO 549: Container RefrigerationDocument114 pages69NT40 - 551 - 500 TO 549: Container RefrigerationKevinNo ratings yet
- Miscarea Rectilinie VariataDocument2 pagesMiscarea Rectilinie VariataKevinNo ratings yet
- Antennas ElectronicsDocument11 pagesAntennas ElectronicsCS LumNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- 27 - OscillatorsDocument19 pages27 - OscillatorsfabirznNo ratings yet
- Hyundai Cma CGMDocument42 pagesHyundai Cma CGMKevinNo ratings yet
- Real-Time Systems Introduction by Prof. Kasim Al-AubidyDocument11 pagesReal-Time Systems Introduction by Prof. Kasim Al-Aubidystephen562001No ratings yet
- CISSP-2022 Exam Cram Domain 6Document13 pagesCISSP-2022 Exam Cram Domain 6pazi_441395439No ratings yet
- JavaDocument18 pagesJavaShivek agrawalNo ratings yet
- CSS Practical No. 14. Roll No. 32Document25 pagesCSS Practical No. 14. Roll No. 32CM5I53Umeidhasan ShaikhNo ratings yet
- W124 Madness Singapore: One Cause of Erratic Idling of The Bosch KE Jetronic:CISE Driven W124Document2 pagesW124 Madness Singapore: One Cause of Erratic Idling of The Bosch KE Jetronic:CISE Driven W124manonpomNo ratings yet
- ASAP Methodology PDFDocument4 pagesASAP Methodology PDFAkshay DiasNo ratings yet
- Introduction To RPADocument11 pagesIntroduction To RPAVince Espinosa100% (1)
- Kuber Net EsDocument6 pagesKuber Net EsjayNo ratings yet
- Test Analyst Assessment ExamDocument5 pagesTest Analyst Assessment ExamTeresita Zafra0% (1)
- Perkins Tier 2 Diesel Engine Electronic Troubleshooting GuideDocument154 pagesPerkins Tier 2 Diesel Engine Electronic Troubleshooting GuideJAVIER NAVA100% (1)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Rapid Architected Analysis and Discovery Prototyping ApproachesDocument5 pagesRapid Architected Analysis and Discovery Prototyping ApproachesLunara NurgalievaNo ratings yet
- Full IT Audit Workbook 2015Document53 pagesFull IT Audit Workbook 2015vberkovscribdNo ratings yet
- Internal Audit TrainingDocument71 pagesInternal Audit TrainingAniil KumarNo ratings yet
- FlatironDocument11 pagesFlatironaNdoRi8No ratings yet
- Icc JavascriptDocument153 pagesIcc JavascriptMatthew JarilloNo ratings yet
- Olaf Musch - Design Patterns With Java - An Introduction-Springer Vieweg (2023)Document344 pagesOlaf Musch - Design Patterns With Java - An Introduction-Springer Vieweg (2023)balabasciuc1No ratings yet
- Session 12: Failure Mode and Effects Criticality Analysis (FMECA)Document9 pagesSession 12: Failure Mode and Effects Criticality Analysis (FMECA)Ritu ShahNo ratings yet
- Roadmap of PythonDocument3 pagesRoadmap of PythonKhan ShinwariNo ratings yet
- Zed Attack Proxy - Simon BennettsDocument28 pagesZed Attack Proxy - Simon BennettsVicky ZulfikarNo ratings yet
- Rancang Bangun Sistem Rack in Dan Rack Out PMT Otomatis Di Kubikel 20 KV Berbasis Arduino Mega 2560 Menggunakan Vtscada 11.2Document8 pagesRancang Bangun Sistem Rack in Dan Rack Out PMT Otomatis Di Kubikel 20 KV Berbasis Arduino Mega 2560 Menggunakan Vtscada 11.2Galang Eka SaputraNo ratings yet
- Ad SW Final Revision Essay QuestionDocument4 pagesAd SW Final Revision Essay QuestionKAREEM Abo ELsouDNo ratings yet
- AmbiguityDocument2 pagesAmbiguityIpsha GuhaNo ratings yet
- Accelera'ng Medical Device Development While Improving ComplianceDocument51 pagesAccelera'ng Medical Device Development While Improving ComplianceFaisal100% (1)
- Object-Oriented Software Engineering: Mini Project On National Center of Information TechnologyDocument18 pagesObject-Oriented Software Engineering: Mini Project On National Center of Information TechnologyAbhishek MisraNo ratings yet
- Pythontrainingtutorial 170613150508Document32 pagesPythontrainingtutorial 170613150508Ali M. RiyathNo ratings yet
- GOPAL PATHI Premkumar DiscussionDocument11 pagesGOPAL PATHI Premkumar Discussionapi-3801073100% (2)
- GUI Testing On A Product Suite Using On-The-Shelf Testing SoftwareDocument15 pagesGUI Testing On A Product Suite Using On-The-Shelf Testing SoftwareAnubhav JainNo ratings yet
- Ok I Port Notification Letter 082709Document2 pagesOk I Port Notification Letter 082709tristanlebossNo ratings yet
- Principles and Practices of Maintenance PlanningDocument6 pagesPrinciples and Practices of Maintenance PlanningGopi KrishnanNo ratings yet
- Duke Engine ReportDocument9 pagesDuke Engine ReportDeepak Jindal100% (1)
- The New 3D Layout for Oil & Gas Offshore Projects: How to ensure successFrom EverandThe New 3D Layout for Oil & Gas Offshore Projects: How to ensure successRating: 4.5 out of 5 stars4.5/5 (3)
- Offshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsFrom EverandOffshore Wind Energy Generation: Control, Protection, and Integration to Electrical SystemsNo ratings yet
- RV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!From EverandRV Living Collection: RV living for beginners, RV travel for the whole family, RV repair and RV mobile solar power: Experience Freedom on the roads alone or with your family with this collection. Learn how to repair your motorhome while using renewable energy!No ratings yet
- Power of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesFrom EverandPower of Habit: The Ultimate Guide to Forming Positive Daily Habits, Learn How to Effectively Break Your Bad Habits For Good and Start Creating Good OnesRating: 4.5 out of 5 stars4.5/5 (21)
- Fundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsFrom EverandFundamentals of Hydrogen Production and Utilization in Fuel Cell SystemsNo ratings yet
- Nuclear Energy in the 21st Century: World Nuclear University PressFrom EverandNuclear Energy in the 21st Century: World Nuclear University PressRating: 4.5 out of 5 stars4.5/5 (3)