You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Assembly Language Programming 8085 PDFDocument29 pagesAssembly Language Programming 8085 PDFRoshan ShawNo ratings yet
- Exception HandlingDocument15 pagesException HandlingRoshan ShawNo ratings yet
- PolymorphismDocument26 pagesPolymorphismRoshan ShawNo ratings yet
- Operator OverloadingDocument15 pagesOperator OverloadingRoshan ShawNo ratings yet
- Operator OverloadingDocument15 pagesOperator OverloadingRoshan ShawNo ratings yet
- Constructor DestructorDocument16 pagesConstructor DestructorRoshan ShawNo ratings yet
- InheritanceDocument26 pagesInheritanceRoshan ShawNo ratings yet
- Classes and ObjectsDocument34 pagesClasses and ObjectsRoshan ShawNo ratings yet
- Constructer & DestructerDocument12 pagesConstructer & DestructerAmit KumarNo ratings yet
- Friend Function & Friend ClassDocument26 pagesFriend Function & Friend ClassRoshan ShawNo ratings yet
- InheritanceDocument26 pagesInheritanceRoshan ShawNo ratings yet
- PolymorphismDocument26 pagesPolymorphismRoshan ShawNo ratings yet
- Introduction To C++Document33 pagesIntroduction To C++Roshan ShawNo ratings yet
- Friend Function & Friend ClassDocument26 pagesFriend Function & Friend ClassRoshan ShawNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The 8051 MicrocontrollerDocument142 pagesThe 8051 MicrocontrollerRahul RaushanNo ratings yet
- Router HackingDocument10 pagesRouter HackingferjuveloNo ratings yet
- Jenell Strachan - ResumeDocument2 pagesJenell Strachan - ResumejjastrachanNo ratings yet
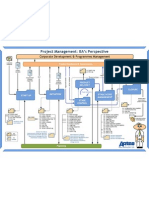
- Project Management PosterDocument1 pageProject Management Posterhamed100% (3)
- Municipality of Alaminos, Laguna: GeographyDocument5 pagesMunicipality of Alaminos, Laguna: GeographyadrianNo ratings yet
- Ep-10 Roof Over Roof Deck Fdas & Lighting Layout - Auxillary & Power LayoutDocument1 pageEp-10 Roof Over Roof Deck Fdas & Lighting Layout - Auxillary & Power LayoutNyel ArmstrongNo ratings yet
- Saferhome Standards Society: 205 - 2006 West 10Th Avenue, Vancouver, BC V6J 2B3 604.731.1020 Ext 220 - 604.731.4003Document7 pagesSaferhome Standards Society: 205 - 2006 West 10Th Avenue, Vancouver, BC V6J 2B3 604.731.1020 Ext 220 - 604.731.4003thilinaNo ratings yet
- Americanroseannu 1922 AmerDocument254 pagesAmericanroseannu 1922 AmerTheGIPSYinthePARLOURNo ratings yet
- Proofex LM PDFDocument2 pagesProofex LM PDFmilanbrasinaNo ratings yet
- ATV LXM IS Option Modules S1A45591 11Document10 pagesATV LXM IS Option Modules S1A45591 11arnaucuentatrabajoNo ratings yet
- Exercises NetworkingDocument5 pagesExercises NetworkingDo ReNo ratings yet
- BES Vs BES Express Vs BIS ComparisonDocument2 pagesBES Vs BES Express Vs BIS Comparisonalbert_jeremieNo ratings yet
- E02 Installation of Cable HV LV With IndexDocument5 pagesE02 Installation of Cable HV LV With Indexsyed_sadiq62100% (2)
- The Rationale of Architecture 2Document80 pagesThe Rationale of Architecture 2Yarisa Villar BonilloNo ratings yet
- Critical RegionalismDocument11 pagesCritical Regionalismyoga ganeshNo ratings yet
- COE381 Microprocessors Marking Scheame: Q1 (A) - Write Explanatory Note On General-Purpose ComputersDocument6 pagesCOE381 Microprocessors Marking Scheame: Q1 (A) - Write Explanatory Note On General-Purpose ComputersEric Leo AsiamahNo ratings yet
- Tabiat BridgeDocument22 pagesTabiat BridgeAirin Akter Airin0% (1)
- Red Hat Training and CertificationDocument4 pagesRed Hat Training and CertificationRobert HornNo ratings yet
- Microsoft Project 2013Document12 pagesMicrosoft Project 2013Luis Eduardo CortesNo ratings yet
- MashupDocument60 pagesMashuparnitha_akhilaNo ratings yet
- Setup Ruby On Rails Development EnvironmentDocument5 pagesSetup Ruby On Rails Development EnvironmentLe Quang Vu KeNo ratings yet
- B6058 Course GuideDocument484 pagesB6058 Course GuideEuphy MiaNo ratings yet
- Treatment of Salt Over PlasterDocument2 pagesTreatment of Salt Over PlasterKalyanChakrabartyNo ratings yet
- How To Design To: Eurocode 2 (EC2)Document1 pageHow To Design To: Eurocode 2 (EC2)Delano KarismaNo ratings yet
- Aspire 4745Document67 pagesAspire 4745Richard CleeNo ratings yet
- Pic 32MXDocument448 pagesPic 32MXQuang NguyễnNo ratings yet
- The Innovative New Edjpro Narrow: Suitable For A 125Mm Panel WidthDocument2 pagesThe Innovative New Edjpro Narrow: Suitable For A 125Mm Panel WidthJacky LeongNo ratings yet
- Microcontroller SlideDocument48 pagesMicrocontroller Slidesyahmimisahfani100% (2)
- Uart (Universal Asynchronous Receiver Transmitter) ProtocolDocument3 pagesUart (Universal Asynchronous Receiver Transmitter) Protocolshilpa8a8s100% (1)
- DK Eyewitness Top 10 Provence and The Côte D'azur (Pocket Travel Guide)Document162 pagesDK Eyewitness Top 10 Provence and The Côte D'azur (Pocket Travel Guide)Mayur MulyeNo ratings yet