You might also like
- Design and Simulation of A Linear LVDT Sensor For Precise Measurement-Based ApplicationsDocument3 pagesDesign and Simulation of A Linear LVDT Sensor For Precise Measurement-Based ApplicationsamitpandaNo ratings yet
- Real Time Control of An Active Power FilDocument10 pagesReal Time Control of An Active Power FilAbdelkarim CHEMIDINo ratings yet
- Magnetic Forces and Moving Body Induced Voltages: Applications To Velocity Sensing and DC-AC ConversionDocument7 pagesMagnetic Forces and Moving Body Induced Voltages: Applications To Velocity Sensing and DC-AC ConversionAryce_No ratings yet
- Distribution of Electrical Current Density Into Planar Magnetic Components According To FrequencyDocument7 pagesDistribution of Electrical Current Density Into Planar Magnetic Components According To FrequencyIJAR JOURNALNo ratings yet
- Solid-State Electronics: Gennadiy Z. GarberDocument7 pagesSolid-State Electronics: Gennadiy Z. GarberGennadiyNo ratings yet
- Wang 2019Document10 pagesWang 2019pqrs312aNo ratings yet
- Compensated Current Differential Relay For Y - Transformer ProtectionDocument7 pagesCompensated Current Differential Relay For Y - Transformer ProtectionproteccionesNo ratings yet
- The Device Parameters Simulation of Electrical Fast Transient GeneratorDocument6 pagesThe Device Parameters Simulation of Electrical Fast Transient GeneratorKen OhNo ratings yet
- ST1504 063Document6 pagesST1504 063Costel CostescuNo ratings yet
- Multi-Cantilever HEMT-based Resonant Sensor: Irina Khmyrova, and Elena ShestakovaDocument4 pagesMulti-Cantilever HEMT-based Resonant Sensor: Irina Khmyrova, and Elena ShestakovaQuan LinhNo ratings yet
- Analytical Model of Double Gate TFETDocument7 pagesAnalytical Model of Double Gate TFETFahad NibirNo ratings yet
- Sith-Model: CAE in Power-ElectronicsDocument7 pagesSith-Model: CAE in Power-ElectronicsAbdulAzizNo ratings yet
- Mte 1102Document22 pagesMte 1102Sourav RoyNo ratings yet
- FE-Modelling of Induction Tool Responses: F Iii: GDocument4 pagesFE-Modelling of Induction Tool Responses: F Iii: GtomhowNo ratings yet
- A Fast Method For Calculation of Transformers Leakage Reactance Using Energy TechniqueDocument8 pagesA Fast Method For Calculation of Transformers Leakage Reactance Using Energy TechniqueAkash VermaNo ratings yet
- Biomedicak Instrumentation LabDocument56 pagesBiomedicak Instrumentation LabMD. ASHIQUR RAHMAN 1602111No ratings yet
- Correntes Parasitas - TrilhosDocument10 pagesCorrentes Parasitas - TrilhosHenrique RobertoNo ratings yet
- By: Gebremariam Fisseha Adigrat University, Ethiopia 2010E.CDocument17 pagesBy: Gebremariam Fisseha Adigrat University, Ethiopia 2010E.CYosef KirosNo ratings yet
- Thiết kế và phát triển dòng điện cao DCDocument6 pagesThiết kế và phát triển dòng điện cao DCKhởi NguyễnNo ratings yet
- Application of Hysteretic Current-Mode Control Technology For Electrostatic PrecipitatorDocument5 pagesApplication of Hysteretic Current-Mode Control Technology For Electrostatic PrecipitatorsharathNo ratings yet
- Sensors 07 03192Document17 pagesSensors 07 03192Nilesh GuptaNo ratings yet
- An On-Line Monitoring System For A Micro Electrical Discharge Machining (micro-EDM) ProcessDocument9 pagesAn On-Line Monitoring System For A Micro Electrical Discharge Machining (micro-EDM) ProcessAnang KatyayanNo ratings yet
- 2113 140 Makale 5662a41dcad0cDocument10 pages2113 140 Makale 5662a41dcad0cMuhammad SarmadNo ratings yet
- High Speed Multichannel Impedance Measuring System: Acta ImekoDocument6 pagesHigh Speed Multichannel Impedance Measuring System: Acta ImekoGoran MiljkovicNo ratings yet
- Mach-Zehnder Interferometer For Separation of Platelets From Red Blood Cells UsingdielectrophoreticsDocument7 pagesMach-Zehnder Interferometer For Separation of Platelets From Red Blood Cells UsingdielectrophoreticsDr. Shwetha MNo ratings yet
- Enhanced Modelling and Early Detection oDocument8 pagesEnhanced Modelling and Early Detection oDalal HelmiNo ratings yet
- Abstract-An Analog Circuit For The Fitzhugh-Nagumo Equations IsDocument5 pagesAbstract-An Analog Circuit For The Fitzhugh-Nagumo Equations Isneel1237No ratings yet
- Advances in Fluxgate Sensors: Pavel RipkaDocument7 pagesAdvances in Fluxgate Sensors: Pavel RipkaJose AlaezNo ratings yet
- SPICE Version 2G User's GuideDocument48 pagesSPICE Version 2G User's Guidexing tangNo ratings yet
- Ec8353 QBDocument41 pagesEc8353 QBNagendran100% (1)
- Analysis of Constant-Current Characteristics For Current SourcesDocument6 pagesAnalysis of Constant-Current Characteristics For Current SourcesFitri PuspasariNo ratings yet
- Simulation of Leakage Current Measurement On Medical Devices Using Helmholtz Coil Configuration With Different Current FlowDocument8 pagesSimulation of Leakage Current Measurement On Medical Devices Using Helmholtz Coil Configuration With Different Current Flowerwinwxy9065No ratings yet
- Expansion of The Ohm's Law in Non-Sinusoidal AC CircuitDocument8 pagesExpansion of The Ohm's Law in Non-Sinusoidal AC CircuitIvan JugovicNo ratings yet
- Electrochemical Impedance SpectrosDocument25 pagesElectrochemical Impedance SpectrosBogdan Buu100% (1)
- Analysis of The Residual Flux Influence On InrushDocument4 pagesAnalysis of The Residual Flux Influence On InrushMoba AddictNo ratings yet
- The Role of A Wiring Model in Switching Cell Transients: The PiN Diode Turn-Off CaseDocument9 pagesThe Role of A Wiring Model in Switching Cell Transients: The PiN Diode Turn-Off CasePeng KangNo ratings yet
- An LVDT-based Self-Actuating Displacement TransducerDocument7 pagesAn LVDT-based Self-Actuating Displacement TransducerGeorge PetersNo ratings yet
- MD Mostofa Kamal Tareq - IEEE - ICPCSIDocument4 pagesMD Mostofa Kamal Tareq - IEEE - ICPCSInahidNo ratings yet
- Efficient Wireless Power Transfer - Resonance Does Not Imply High EfficiencyDocument4 pagesEfficient Wireless Power Transfer - Resonance Does Not Imply High EfficiencyMihai PopaNo ratings yet
- Research PaperDocument3 pagesResearch PaperIncharaNo ratings yet
- Modelling PDFDocument8 pagesModelling PDFhewitt isaacNo ratings yet
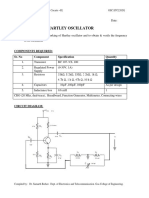
- Expt 7 - Hartley Oscillator (2020)Document4 pagesExpt 7 - Hartley Oscillator (2020)samarthNo ratings yet
- Equivalent Circuit and Calculation of Its Parameters of Magnetic-Coupled-Resonant Wireless Power TransferDocument17 pagesEquivalent Circuit and Calculation of Its Parameters of Magnetic-Coupled-Resonant Wireless Power TransferGaneshKunaNo ratings yet
- Current Sensors Using Magnetic Materials: Invited PaperDocument6 pagesCurrent Sensors Using Magnetic Materials: Invited PaperQuan LinhNo ratings yet
- Power Electronics in Biomedical ApplicationsDocument4 pagesPower Electronics in Biomedical Applicationselpatotas22No ratings yet
- Prochazka 2015Document4 pagesProchazka 2015Radouan RadwanNo ratings yet
- Rogowski Coil Transient Performance and Atp Simulation For Aplications in Protective RelaysDocument6 pagesRogowski Coil Transient Performance and Atp Simulation For Aplications in Protective RelaysJose Alberto RodriguezNo ratings yet
- April 2008Document11 pagesApril 2008lvrevathiNo ratings yet
- Optimization of Design Parameters of A EPPR Valve Solenoid Using Artificial Neural NetworkDocument8 pagesOptimization of Design Parameters of A EPPR Valve Solenoid Using Artificial Neural NetworkNhat NguyenNo ratings yet
- THE Simulation Study of DC Grounding Electrode BasDocument6 pagesTHE Simulation Study of DC Grounding Electrode BasFOGNo ratings yet
- EXP7Document12 pagesEXP7Hero CourseNo ratings yet
- An Active Inductor-Based VCO With Wide Tuning Range and High DC-to-RF Power EfficiencyDocument5 pagesAn Active Inductor-Based VCO With Wide Tuning Range and High DC-to-RF Power EfficiencyOmarFaruqeNo ratings yet
- Stray CapacitanceDocument21 pagesStray Capacitancesyed.adi91No ratings yet
- Thesis PiezoelectricDocument7 pagesThesis Piezoelectricnibaditapalmerpaterson100% (2)
- Unit 13Document19 pagesUnit 13Rajeev KapoorNo ratings yet
- Lecture Note 7 (Sensor) - Sensor Based On Magnetic FieldDocument28 pagesLecture Note 7 (Sensor) - Sensor Based On Magnetic FieldBăng Trương ThanhNo ratings yet
- Lab Experiment # 1: Familiarization With Modern Electronics Lab TrainerDocument5 pagesLab Experiment # 1: Familiarization With Modern Electronics Lab TrainerSaad khan100% (1)
- Recreation of Voltage Fluctuation Using Basic Parameters Measured in The Power GridDocument9 pagesRecreation of Voltage Fluctuation Using Basic Parameters Measured in The Power GridPetruta OloguNo ratings yet
- High Frequency Pulse Width Modulator With ResistanDocument6 pagesHigh Frequency Pulse Width Modulator With ResistanAnonymous e3XZzQNo ratings yet
- Chapter 3Document19 pagesChapter 3Ayesha TahirNo ratings yet
- Chapter 2Document41 pagesChapter 2Ayesha TahirNo ratings yet
- Chapter 2Document41 pagesChapter 2Ayesha TahirNo ratings yet
- Chapter 2Document41 pagesChapter 2Ayesha TahirNo ratings yet
- Electronic Circuits: Syed Muhammad Rehan Ali Phone No. 03335577508 Whatsapp. 03175115649Document39 pagesElectronic Circuits: Syed Muhammad Rehan Ali Phone No. 03335577508 Whatsapp. 03175115649Syed Mohammad Rehan AliNo ratings yet
- AD734 WWWWDocument20 pagesAD734 WWWWAmmon VillalobosNo ratings yet
- Adc AccuracyDocument45 pagesAdc AccuracySyed Mohammad Rehan AliNo ratings yet
- EMC Design Guide For PCBDocument78 pagesEMC Design Guide For PCBFaruq AhmedNo ratings yet
- Detector de MetaleDocument7 pagesDetector de Metalefanei100% (1)
- GoodDocument51 pagesGoodPrerna RawatNo ratings yet
- How To Maintain Sf6 Circuit BreakerDocument6 pagesHow To Maintain Sf6 Circuit BreakerijsretNo ratings yet
- High Voltage Ignition Coil Driver Power I.C.: VB921ZVFI VB921ZVSPDocument7 pagesHigh Voltage Ignition Coil Driver Power I.C.: VB921ZVFI VB921ZVSPNgoc AnNo ratings yet
- Soft-Switching Buck Boost Converter Using Passive Snubber Composed of Pulse Current Regenerative Resonant CircuitDocument5 pagesSoft-Switching Buck Boost Converter Using Passive Snubber Composed of Pulse Current Regenerative Resonant CircuitHariesh WaranNo ratings yet
- Physics Formula SheetDocument13 pagesPhysics Formula Sheetthunder boltNo ratings yet
- Transformer BookDocument86 pagesTransformer BookHari Shankar KumawatNo ratings yet
- LVDTDocument6 pagesLVDTLaithSalameenNo ratings yet
- Selector Guide PDFDocument45 pagesSelector Guide PDFTudosie AlexeyNo ratings yet
- Overview of Power Integrity Solutions On Package and PCB: Decoupling and EBG IsolationDocument39 pagesOverview of Power Integrity Solutions On Package and PCB: Decoupling and EBG IsolationIsmaiel KaladiNo ratings yet
- Ics 5 2000 R2005 R2010Document156 pagesIcs 5 2000 R2005 R2010Jesus Salazar50% (2)
- RXM4AB1B7: Product Data SheetDocument5 pagesRXM4AB1B7: Product Data SheetPasindu PriyankaraNo ratings yet
- KSCB It ReportDocument52 pagesKSCB It ReportShalu ShaluNo ratings yet
- Electrical Engineering Board Exam CoverageDocument8 pagesElectrical Engineering Board Exam Coveragekheilonalistair100% (1)
- MagnetismDocument73 pagesMagnetismjohnNo ratings yet
- Wireless Power Transmission For The Internet of Things (IoT)Document6 pagesWireless Power Transmission For The Internet of Things (IoT)Gokul SaiNo ratings yet
- Analysis and Design of Series Combining Transformers For Integrated Doherty Power AmplifiersDocument4 pagesAnalysis and Design of Series Combining Transformers For Integrated Doherty Power Amplifiersreddy balajiNo ratings yet
- Requirements of System & Equipment EarthingDocument108 pagesRequirements of System & Equipment EarthingphkhatriNo ratings yet
- KCET 2017 Question Paper & Answer Key PhysicsDocument8 pagesKCET 2017 Question Paper & Answer Key PhysicsKumar HanumanthaiahNo ratings yet
- EEC 125 Note UpdatedDocument23 pagesEEC 125 Note UpdatedElijah EmmanuelNo ratings yet
- An EpcosDocument22 pagesAn EpcosIvan GvozdenovicNo ratings yet
- Coils-Set-Manual-SF-8616-and-SF-8617 en EspañolDocument21 pagesCoils-Set-Manual-SF-8616-and-SF-8617 en EspañolJosé Álvarez100% (1)
- Stereo Decoder: Fig. I. Block Diagram of Stereo Signal EncqderDocument6 pagesStereo Decoder: Fig. I. Block Diagram of Stereo Signal EncqderChindeaNo ratings yet
- Slup083 PDFDocument7 pagesSlup083 PDFlu1agpNo ratings yet
- 09.04.20 Sr.N-SUPERCHAINAL Jee Adv 2017 P1 UTA-03 QP PDFDocument19 pages09.04.20 Sr.N-SUPERCHAINAL Jee Adv 2017 P1 UTA-03 QP PDFYug SharmaNo ratings yet
- 1mtech Ee PCDDocument89 pages1mtech Ee PCDJohn Larry CorpuzNo ratings yet
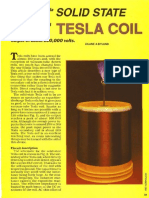
- Solid State Tesla CoilDocument7 pagesSolid State Tesla CoilJboscoNo ratings yet
- Black Box Tech Lab: simple Adams motor concept 亚当斯电机原理11Document10 pagesBlack Box Tech Lab: simple Adams motor concept 亚当斯电机原理11Janet WaldeNo ratings yet
- Disha Publication Jee-Main 2016 Solved-Paper. V526057485Document61 pagesDisha Publication Jee-Main 2016 Solved-Paper. V526057485alexvidalNo ratings yet