You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Streak Formation in Flow Over Biomimetic Fish Scale ArraysDocument35 pagesStreak Formation in Flow Over Biomimetic Fish Scale ArraysMarinhoNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- How To Overcome The Courant-Friedrichs-Lewy Condition of Explicit Discretizations?Document21 pagesHow To Overcome The Courant-Friedrichs-Lewy Condition of Explicit Discretizations?MarinhoNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- A Test Problem For Outflow Boundary Step Conditions-Flow Over A Backward-FacingDocument15 pagesA Test Problem For Outflow Boundary Step Conditions-Flow Over A Backward-FacingMarinhoNo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- L1 IntroductionDocument45 pagesL1 IntroductionMarinhoNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- ATFEM Lecture01 PDFDocument78 pagesATFEM Lecture01 PDFMarinhoNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Assignment-2 With AnswersDocument3 pagesAssignment-2 With AnswersMarinhoNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Case: Spare Part Inventory Optimization For The Chinook HelicopterDocument2 pagesCase: Spare Part Inventory Optimization For The Chinook HelicopterMarinhoNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Solids Surfaces - Introduction 2019 - 2020Document37 pagesSolids Surfaces - Introduction 2019 - 2020MarinhoNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Maintenance Management & Engineering 2019: Assignment 4: Performing A Mechanism Based Failure AnalysisDocument2 pagesMaintenance Management & Engineering 2019: Assignment 4: Performing A Mechanism Based Failure AnalysisMarinhoNo ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Lecture1 2019Document49 pagesLecture1 2019MarinhoNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- SELECTED STORIES IN MATHEMATICS AND PHYSICS/book Lambert Academic PublishingDocument91 pagesSELECTED STORIES IN MATHEMATICS AND PHYSICS/book Lambert Academic PublishingGeorge Mpantes mathematics teacher100% (1)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Homework Set 1: Due August 14Document3 pagesHomework Set 1: Due August 14jog10No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- MAT523 Chapter 3.1 - Vector SpaceDocument24 pagesMAT523 Chapter 3.1 - Vector SpaceMinnie MouseNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
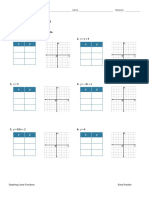
- Graphing Linear InequalitiesDocument4 pagesGraphing Linear InequalitiesShivamNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- IndicesDocument15 pagesIndicesSuren DrajNo ratings yet
- MainNumMath KMMDocument85 pagesMainNumMath KMMAnupEkbote0% (1)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Biorthogonal WaveletsDocument23 pagesBiorthogonal WaveletsNavaneeth PayyanurNo ratings yet
- Essential Calculus Early Transcendentals 2Nd by James Stewart Full ChapterDocument41 pagesEssential Calculus Early Transcendentals 2Nd by James Stewart Full Chapterbrett.armbruster130100% (27)
- DST Group TR 3530Document43 pagesDST Group TR 3530devNo ratings yet
- (MAI 1.16) EIGENVALUES - EIGENVECTORS - SolutionsDocument4 pages(MAI 1.16) EIGENVALUES - EIGENVECTORS - SolutionsNhu Quynh NguyenNo ratings yet
- (For XI & XII Studying Students) : Code-A 20/09/2021Document5 pages(For XI & XII Studying Students) : Code-A 20/09/2021HIMANI CHUNDURUNo ratings yet
- Relativity EssayDocument15 pagesRelativity EssayQuinto BeatleNo ratings yet
- Nda Test Maths-2Document17 pagesNda Test Maths-2ROHIT YadavNo ratings yet
- Matrices RotationsDocument10 pagesMatrices RotationsBlackopsNo ratings yet
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- 75 10th Maths Unit Test 1 Model Question Paper English Medium 1Document1 page75 10th Maths Unit Test 1 Model Question Paper English Medium 1சரண் கணினியகம்No ratings yet
- Hamiltonian Systems - Introduction PDFDocument5 pagesHamiltonian Systems - Introduction PDFDang Quang DungNo ratings yet
- AP GP ExerciseDocument4 pagesAP GP ExercisePng Poh ShengNo ratings yet
- ข้อสอบ คณิต มัธยม ปี 2564Document8 pagesข้อสอบ คณิต มัธยม ปี 2564Narupon Noppakun SaisemaNo ratings yet
- A Level Solutions PDFDocument7 pagesA Level Solutions PDFriemann lebesgueNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Department of Information Technology: M.A.M. College of Engineering and TechnologyDocument17 pagesDepartment of Information Technology: M.A.M. College of Engineering and TechnologyGanesh KumarNo ratings yet
- Mathematics: Daily Practice ProblemsDocument12 pagesMathematics: Daily Practice ProblemsvkNo ratings yet
- VJC 2015 H2 J1 Math Promos Questions Singapore JC VictoriaDocument5 pagesVJC 2015 H2 J1 Math Promos Questions Singapore JC VictoriaAlxNo ratings yet
- Mathematics SSC 1 Paper IIDocument16 pagesMathematics SSC 1 Paper IIKumail LakraNo ratings yet
- Integrating Rational Functions by Partial FractionsDocument40 pagesIntegrating Rational Functions by Partial Fractionsمحمد شهريل محمد نورNo ratings yet
- Lesson Plan Sem 3Document35 pagesLesson Plan Sem 3narayananx5No ratings yet
- Discrete Time SignalsDocument48 pagesDiscrete Time SignalsJomer JuanNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Analysis of Structural Member Systems - Jerome J. Connor PDFDocument617 pagesAnalysis of Structural Member Systems - Jerome J. Connor PDFDiego Leonel Suárez Vásquez100% (1)
- Matlab Tutorial 1Document29 pagesMatlab Tutorial 1KuAdenan KuSyakranNo ratings yet
- Alg Lesson 4-1Document4 pagesAlg Lesson 4-1Camilo MartinezNo ratings yet
- CHAPTER 4 First Order Differential EquationsDocument49 pagesCHAPTER 4 First Order Differential EquationsPaih DtNo ratings yet