You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (894)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- .IEEE Recommended Practice For Excitation System Models For Power System Stability StudiesDocument16 pages.IEEE Recommended Practice For Excitation System Models For Power System Stability Studiesmirage1977No ratings yet
- .IEEE Recommended Practice For Excitation System Models For Power System Stability StudiesDocument16 pages.IEEE Recommended Practice For Excitation System Models For Power System Stability Studiesmirage1977No ratings yet
- 11KV SAT ProcedureDocument25 pages11KV SAT Proceduremirage1977100% (1)
- (1st Edition) Lillian C. McDermott - Peter S. Shaffer - Tutorials in Introductory Physics - Homework-Pearson (2002) - 39-42Document4 pages(1st Edition) Lillian C. McDermott - Peter S. Shaffer - Tutorials in Introductory Physics - Homework-Pearson (2002) - 39-42Fryda Ayudha0% (2)
- Distribution Automation Handbook ABB - Electrical SafetyDocument12 pagesDistribution Automation Handbook ABB - Electrical SafetyEduardo Zapata100% (1)
- Commissioning of Siemens switchboards for Prelude FLNG projectDocument2 pagesCommissioning of Siemens switchboards for Prelude FLNG projectmirage1977No ratings yet
- WATL & EATL - INP's Role in Siemens' HVDC Substation Projects in AlbertaDocument2 pagesWATL & EATL - INP's Role in Siemens' HVDC Substation Projects in Albertamirage1977No ratings yet
- Ret670 PDFDocument318 pagesRet670 PDFmirage1977No ratings yet
- A1-Fundamentals of Protection PracticeDocument13 pagesA1-Fundamentals of Protection Practicemirage1977No ratings yet
- Gen Protn Philosophy&SettingsDocument4 pagesGen Protn Philosophy&Settingsmirage1977No ratings yet
- Siemens Power AcademyTD Catalog 2018Document452 pagesSiemens Power AcademyTD Catalog 2018Michael Parohinog Gregas100% (1)
- Current Transformers Selection Guide PDFDocument20 pagesCurrent Transformers Selection Guide PDFsdvijayNo ratings yet
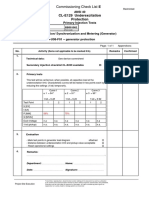
- CL-E129 Underexcitation Protection: Commissioning Check List EDocument1 pageCL-E129 Underexcitation Protection: Commissioning Check List Emirage1977No ratings yet
- Com Profinet-Io 7UM62 UsDocument36 pagesCom Profinet-Io 7UM62 Usmirage1977No ratings yet
- CL-E137 Earth Fault Protection in DC Circuit: Commissioning Check List EDocument1 pageCL-E137 Earth Fault Protection in DC Circuit: Commissioning Check List Emirage1977No ratings yet
- CL-E136 Panama Colon PP U08Document1 pageCL-E136 Panama Colon PP U08mirage1977No ratings yet
- CL-E135 Over-Excitation Protection: Commissioning Check List EDocument1 pageCL-E135 Over-Excitation Protection: Commissioning Check List Emirage1977No ratings yet
- CL-E131 Stator Earth Fault Protection 90%: Commissioning Check List EDocument2 pagesCL-E131 Stator Earth Fault Protection 90%: Commissioning Check List Emirage1977No ratings yet
- CL-E134 Overvoltage Protection: Commissioning Check List EDocument1 pageCL-E134 Overvoltage Protection: Commissioning Check List Emirage1977No ratings yet
- CL-E130S Panama Colon PP U08Document2 pagesCL-E130S Panama Colon PP U08mirage1977No ratings yet
- Plan View: Reference DrawingDocument1 pagePlan View: Reference Drawingmirage1977No ratings yet
- CL-E128 Impedance Protection: Commissioning Check List EDocument1 pageCL-E128 Impedance Protection: Commissioning Check List Emirage1977No ratings yet
- CL-E125.1 Panama Colon PP U08Document2 pagesCL-E125.1 Panama Colon PP U08mirage1977No ratings yet
- CL-E126 Panama Colon PP U08Document1 pageCL-E126 Panama Colon PP U08mirage1977No ratings yet
- CL-E127 Unbalanced Load Protection: Commissioning Check List EDocument2 pagesCL-E127 Unbalanced Load Protection: Commissioning Check List Emirage1977No ratings yet
- IEEE Generator Protection Tutorial PresentationDocument211 pagesIEEE Generator Protection Tutorial PresentationCinar InalNo ratings yet
- Maintenance Data Sheet MCsetDocument2 pagesMaintenance Data Sheet MCsetBasman George100% (1)
- As 62271 200 2005 High Voltage Switchgear and Controlgear A C Metal Enclosed Switchgear and Controlgear For PDFDocument10 pagesAs 62271 200 2005 High Voltage Switchgear and Controlgear A C Metal Enclosed Switchgear and Controlgear For PDFmirage1977No ratings yet
- MIT8 01SC Problems08 SolutionDocument31 pagesMIT8 01SC Problems08 SolutionJackie Peccadillo Lim67% (3)
- 3 Curvilinear MotionDocument9 pages3 Curvilinear MotionPercival ArcherNo ratings yet
- Forces and Dynamics Physics IBDocument5 pagesForces and Dynamics Physics IBsupergirl123No ratings yet
- Sap DatabaseDocument1,474 pagesSap Databaseបុរស ចិត្ត ស្មោះNo ratings yet
- 1 Relative MotionDocument26 pages1 Relative MotionvvvNo ratings yet
- Dynamics-Ramps and InclinesDocument2 pagesDynamics-Ramps and InclinesEyob YimerNo ratings yet
- CAPE Pure MathematicsDocument139 pagesCAPE Pure Mathematicssalak946290100% (1)
- Aakash RM Physics 11th ch-4 Part 1Document5 pagesAakash RM Physics 11th ch-4 Part 1LONE WOLFNo ratings yet
- AltairAcuSolve 2021 TrainingManualDocument226 pagesAltairAcuSolve 2021 TrainingManualakashthilakNo ratings yet
- Obtlp PhysDocument33 pagesObtlp PhysJanine PalizaNo ratings yet
- Tut - FinalDocument146 pagesTut - FinalShaikh rehan Shaikh rehanNo ratings yet
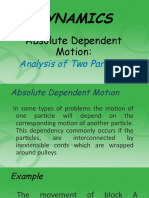
- Absolute Dependent Motion AnalysisDocument23 pagesAbsolute Dependent Motion Analysisshaweeeng 101No ratings yet
- Physics BookDocument50 pagesPhysics Bookmadu1998No ratings yet
- MATH 175 VECTORS AND MECHANICS GUIDEDocument142 pagesMATH 175 VECTORS AND MECHANICS GUIDEDahamani bukari Al-fayeedNo ratings yet
- STEM Diagnostic Test TitleDocument7 pagesSTEM Diagnostic Test TitleMaria benedicta BenitoNo ratings yet
- Instantaneous vs Average Velocity in Mechanics ProblemsDocument36 pagesInstantaneous vs Average Velocity in Mechanics Problemsshopgurl0% (1)
- Forces and Tensions Problems with Detailed SolutionsDocument15 pagesForces and Tensions Problems with Detailed SolutionsAhmad Bilal SabawoonNo ratings yet
- Angular Momentum, Laplacian and Gradient in Spherical Coordinates - IzveduvanjeDocument3 pagesAngular Momentum, Laplacian and Gradient in Spherical Coordinates - IzveduvanjeElena KusevskaNo ratings yet
- Motion 1Document36 pagesMotion 1ACrazyNakedManNo ratings yet
- Statics of Particle Lecture 4 - Forces in Space (3D) : DR Shahruddin Bin Mahzan@Mohd ZinDocument23 pagesStatics of Particle Lecture 4 - Forces in Space (3D) : DR Shahruddin Bin Mahzan@Mohd ZinNorsahira Binti MaslazimNo ratings yet
- Engineering Physics Notes - 2Document117 pagesEngineering Physics Notes - 2Maaran APECNo ratings yet
- Achorripsis: A Sonification of Probability DistributionsDocument5 pagesAchorripsis: A Sonification of Probability DistributionsPaul DupontNo ratings yet
- Science PresentationDocument20 pagesScience PresentationReyniel BelmonteNo ratings yet
- ABAQUS Student TutorialDocument28 pagesABAQUS Student TutorialGana C RoverNo ratings yet
- Syllabus For Bangladesh Physics Olympiad Category - B: 1.mathematicsDocument4 pagesSyllabus For Bangladesh Physics Olympiad Category - B: 1.mathematicsIampieNo ratings yet
- Norma ANSI+AGMA+6000-B96+ (R2002)Document28 pagesNorma ANSI+AGMA+6000-B96+ (R2002)Alex Ripoll100% (5)
- AU09 CP222-3 Analyze Geometry Revit APIDocument24 pagesAU09 CP222-3 Analyze Geometry Revit APIsameh_yehia_2No ratings yet
- 1 and 2 Sem Syllabus 2016 Scheme v2.0Document47 pages1 and 2 Sem Syllabus 2016 Scheme v2.0siddarth kocheriNo ratings yet