You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
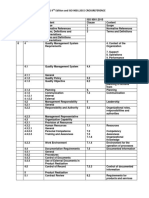
- Crossreference API Q1 9TH and ISO 9001 2015Document3 pagesCrossreference API Q1 9TH and ISO 9001 2015wachid50583% (6)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- WooWTime - Installation & User ManualDocument31 pagesWooWTime - Installation & User ManualKang Amuch0% (1)
- Tso C139Document5 pagesTso C139Russell GouldenNo ratings yet
- Log VL98ANM TMBHT61Z8C2023187Document7 pagesLog VL98ANM TMBHT61Z8C2023187alex mosoNo ratings yet
- Use of Vanadium in Long Steel Products Yu Li and David Milbourn 最终版本)Document6 pagesUse of Vanadium in Long Steel Products Yu Li and David Milbourn 最终版本)Ulises Quintana CarhuanchoNo ratings yet
- Microsoft CEO Satya Nadella's Master Plan - Business Insider PDFDocument4 pagesMicrosoft CEO Satya Nadella's Master Plan - Business Insider PDFLove JainNo ratings yet
- 15 Basic Steps in Boiler DesignDocument11 pages15 Basic Steps in Boiler DesignPesona Alam CilebakNo ratings yet
- 10 Gaa21150 2Document19 pages10 Gaa21150 2suthan100% (1)
- Brent Kung AdderDocument60 pagesBrent Kung AdderAnonymous gLVMeN2hNo ratings yet
- Social Media Marketing (SMM)Document23 pagesSocial Media Marketing (SMM)Aniket GulatiNo ratings yet
- Fans-Their Types, Characteristics, and ApplicationDocument35 pagesFans-Their Types, Characteristics, and ApplicationFarzin SaNo ratings yet
- 34.01.02-BOQ For Bridges NO. 44 RevDocument4 pages34.01.02-BOQ For Bridges NO. 44 Revvigil vigilNo ratings yet
- Zero BDocument1 pageZero Bmaksudur4No ratings yet
- The Return of The In-Rack SprinklerDocument11 pagesThe Return of The In-Rack SprinklerHermi DavidNo ratings yet
- PSM Lecture Note - Draft 1Document34 pagesPSM Lecture Note - Draft 1Philcas LiNo ratings yet
- Application Form SAARCDocument9 pagesApplication Form SAARCEngr Faizullah KhanNo ratings yet
- Caterpillar d398 Parts ManualDocument2 pagesCaterpillar d398 Parts ManualAngel Catuy0% (3)
- Antenna Fundamentals: Radiation From A Short Dipole Antenna (Hertz Dipole)Document19 pagesAntenna Fundamentals: Radiation From A Short Dipole Antenna (Hertz Dipole)Padmavathy VelayudhamNo ratings yet
- Metal SpinningDocument2 pagesMetal SpinningNatasa Sekanic MrkonjicNo ratings yet
- 7 Steps Email Marketing Guide Smart Insights PDFDocument63 pages7 Steps Email Marketing Guide Smart Insights PDFAbdelmonim Awad OsmanNo ratings yet
- 3 Airbus OSD ORO-FC PDFDocument38 pages3 Airbus OSD ORO-FC PDFBizu Atnafu100% (1)
- Stadium ManagementDocument87 pagesStadium ManagementShyamKumar PVNo ratings yet
- South Africa's Economic DiplomacyDocument11 pagesSouth Africa's Economic DiplomacyVuyani LingelaNo ratings yet
- Page 11Document1 pagePage 11Fuzail ArabNo ratings yet
- Prueba Presión Mazda 6Document8 pagesPrueba Presión Mazda 6Jose Luis LopezNo ratings yet
- Lecture 5'CONCRETE BLOCKDocument22 pagesLecture 5'CONCRETE BLOCKErmiyas AlhegnNo ratings yet
- Full Height Turnstile User Manual - ARMA KONTROLDocument21 pagesFull Height Turnstile User Manual - ARMA KONTROLdinilmadhuNo ratings yet
- C++ MCQDocument17 pagesC++ MCQrjkmehtaNo ratings yet
- DBA Lab Manual 13-14Document21 pagesDBA Lab Manual 13-14Abdulla ShaikNo ratings yet
- ABB Manual Motor ProtectorsDocument27 pagesABB Manual Motor ProtectorsMaged MounirNo ratings yet