You might also like
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- JMST 2011 136 DoiDocument6 pagesJMST 2011 136 DoiavciahmNo ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- Power Sources and Control Methods of ROVsDocument33 pagesPower Sources and Control Methods of ROVsavciahmNo ratings yet
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- An Investigation of Fuel E Ciency in High Speed Vessels by Using InterceptorsDocument5 pagesAn Investigation of Fuel E Ciency in High Speed Vessels by Using InterceptorsavciahmNo ratings yet
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (587)
- High Speed Craft Experimental and Numerical Resistance StudyDocument12 pagesHigh Speed Craft Experimental and Numerical Resistance StudyavciahmNo ratings yet
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Waterjet Thesis - Rolls Royce PDFDocument170 pagesWaterjet Thesis - Rolls Royce PDFAmmy singhNo ratings yet
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Propulsion PDFDocument98 pagesPropulsion PDFavciahmNo ratings yet
- P - Eng - 1017GT - As of 20110701Document2 pagesP - Eng - 1017GT - As of 20110701avciahmNo ratings yet
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Scheduling Approach For Ship Design Project With Fields Constraint in Tasks and Human ResourcesDocument6 pagesA Scheduling Approach For Ship Design Project With Fields Constraint in Tasks and Human ResourcesavciahmNo ratings yet
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- International Convention for the Safety of Life at Sea (SOLAS): Key ProvisionsDocument5 pagesInternational Convention for the Safety of Life at Sea (SOLAS): Key ProvisionsOmsimNo ratings yet
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Chemical Tanker DesignDocument20 pagesChemical Tanker DesignAdrian IonutNo ratings yet
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Strength Analysis On Ship Ladder Using Finite Element MethodDocument9 pagesStrength Analysis On Ship Ladder Using Finite Element MethodPraveen Kumar JeyaprakashNo ratings yet
- Presentation - Caravel Replica Niña ShipDocument9 pagesPresentation - Caravel Replica Niña ShipcallertimesNo ratings yet
- Lecture 01Document17 pagesLecture 01misbah waliNo ratings yet
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Yautja: Case File No. WY-8790-2004Document18 pagesYautja: Case File No. WY-8790-2004MorkizgaNo ratings yet
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Adani Dahej Port guide for ship captainsDocument12 pagesAdani Dahej Port guide for ship captainsJIBEESH01No ratings yet
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Evolution of shipbuilding materials from wood to steelDocument3 pagesEvolution of shipbuilding materials from wood to steelbrandondavis1011No ratings yet
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Technical Aspects of Refloating Operations ForDocument14 pagesTechnical Aspects of Refloating Operations ForFederico BabichNo ratings yet
- CV M.alfarisiDocument2 pagesCV M.alfarisiMuhammad AlfarisiNo ratings yet
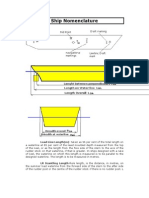
- Ship Nomenclature: Load Line Length (M) - Taken As 96 Per Cent of The Total Length OnDocument6 pagesShip Nomenclature: Load Line Length (M) - Taken As 96 Per Cent of The Total Length Oncaptbaba100% (1)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- MEPC-60-InF.2 ROPME Ballast Water RequirementsDocument5 pagesMEPC-60-InF.2 ROPME Ballast Water RequirementsVarun AgrawalNo ratings yet
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- AB Deck Course FrameworkDocument157 pagesAB Deck Course Frameworkdra100% (2)
- Engineering a Sustainable Future with Sail TransportDocument52 pagesEngineering a Sustainable Future with Sail TransportWilliam Laurentinus Rio PamungkasNo ratings yet
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- 02 RA 281121 BunkeringDocument10 pages02 RA 281121 Bunkeringyoses manurungNo ratings yet
- Boatus20130809 DLDocument94 pagesBoatus20130809 DLjoeblidaNo ratings yet
- AnchoringDocument12 pagesAnchoringDryanmNo ratings yet
- Effect Wind & Current On Ship Handling Effect Wind & Current On Ship HandlingDocument17 pagesEffect Wind & Current On Ship Handling Effect Wind & Current On Ship HandlingAbhimanyu Kumar100% (1)
- Responsibilities of Deck Officer During Anchoring OperationDocument4 pagesResponsibilities of Deck Officer During Anchoring OperationRamonValdezNo ratings yet
- Abandonment of voyage insurance claimsDocument2 pagesAbandonment of voyage insurance claimsManoj VarrierNo ratings yet
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (119)
- ShippingDocument226 pagesShippingamu_more44No ratings yet
- Segregating of Dangerous GoodsDocument47 pagesSegregating of Dangerous GoodsAbdel Nasser Al-sheikh YousefNo ratings yet
- Standing Instructions PDFDocument6 pagesStanding Instructions PDFRizaldie Zambra Jr.100% (2)
- Mpf-04 Nse June 2008Document102 pagesMpf-04 Nse June 2008erinkilroyNo ratings yet
- Chief Mates Orals SyllabusDocument4 pagesChief Mates Orals Syllabusravi vermaNo ratings yet
- Sulphur Inspection Guidance - 2018Document28 pagesSulphur Inspection Guidance - 2018ΑΝΝΑ ΒΛΑΣΣΟΠΟΥΛΟΥNo ratings yet
- Lakshadweep 20 Year PlanDocument239 pagesLakshadweep 20 Year PlandssdNo ratings yet
- PTS 30061020Document54 pagesPTS 30061020ronelbarafaeldiegoNo ratings yet
- Contract Dispute Over Timber SaleDocument9 pagesContract Dispute Over Timber SaleHannah AngelesNo ratings yet
- Bidang Keahlian Nautika (Ant-Iv) Tingkat OperasionalDocument7 pagesBidang Keahlian Nautika (Ant-Iv) Tingkat OperasionalJacky RikoNo ratings yet
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)