You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5813)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Signals, Spectra, Signal Processing ECE 401 (TIP Reviewer)Document40 pagesSignals, Spectra, Signal Processing ECE 401 (TIP Reviewer)James Lindo100% (2)
- 18-791 Lecture #17 Introduction To The Fast Fourier Transform Algorithm Richard M. SternDocument22 pages18-791 Lecture #17 Introduction To The Fast Fourier Transform Algorithm Richard M. SternxenightmareNo ratings yet
- Est Signal To NoiseDocument21 pagesEst Signal To NoiseGiovanniNo ratings yet
- CCD and Cmos SensorsDocument16 pagesCCD and Cmos SensorsVijay Ravi100% (1)
- A Novel Ultra-Wideband Bandpass FilterDocument2 pagesA Novel Ultra-Wideband Bandpass FilterpramodinibidharNo ratings yet
- 05 Convolution of CT and DTDocument63 pages05 Convolution of CT and DTBhaskarNo ratings yet
- Digital Signal Processing Midterm 2Document12 pagesDigital Signal Processing Midterm 2Saied Aly SalamahNo ratings yet
- Datasheeet Yd2030Document4 pagesDatasheeet Yd2030dinnhowNo ratings yet
- MM BSC Solns 2009Document14 pagesMM BSC Solns 2009Asheke ZinabNo ratings yet
- Amity University Haryana: Digital Image Processing Lab Practical FileDocument20 pagesAmity University Haryana: Digital Image Processing Lab Practical FileEkansh SinghNo ratings yet
- EEE302 SampQs MergedDocument78 pagesEEE302 SampQs Mergedc gNo ratings yet
- DCDocument8 pagesDCharshit420No ratings yet
- Rx3852-3408-31 - Rfi RX Multicoupler Uhf 380-520mhzDocument2 pagesRx3852-3408-31 - Rfi RX Multicoupler Uhf 380-520mhzBao Quoc MaiNo ratings yet
- Algorithm For The Identification and Verification PhaseDocument9 pagesAlgorithm For The Identification and Verification PhaseCalvin ElijahNo ratings yet
- Analog Communications Lab Manual - AsraoDocument128 pagesAnalog Communications Lab Manual - AsraoAllanki Sanyasi RaoNo ratings yet
- Audio Visual Speech RecognitionDocument16 pagesAudio Visual Speech RecognitionAmrNo ratings yet
- Ik4auy fst3125 141Document10 pagesIk4auy fst3125 141pchristo18549No ratings yet
- Dm00119042 PWM Resolution Enhancement Through A Dithering Technique For Stm32 Advancedconfiguration Generalpurpose and Lite Timers StmicroelectronicsDocument22 pagesDm00119042 PWM Resolution Enhancement Through A Dithering Technique For Stm32 Advancedconfiguration Generalpurpose and Lite Timers StmicroelectronicscutoNo ratings yet
- 9A04501 Analog CommunicationsDocument4 pages9A04501 Analog CommunicationssivabharathamurthyNo ratings yet
- Single-Amplifier-Biquad (SAB) Filter Sections: ESE319 Introduction To MicroelectronicsDocument27 pagesSingle-Amplifier-Biquad (SAB) Filter Sections: ESE319 Introduction To MicroelectronicsAnimesh JainNo ratings yet
- DCDR Important Question Bank (Assignment/DPR Question) : Faculty of Engineering - 083 Information Technology - 16Document1 pageDCDR Important Question Bank (Assignment/DPR Question) : Faculty of Engineering - 083 Information Technology - 16Dhruvi MandaviyaNo ratings yet
- Lecture 2 - Noise in Transmission ChannelDocument35 pagesLecture 2 - Noise in Transmission ChannelDavid KanikiNo ratings yet
- Pluse Amplitude Modulation: AIM:-To Study The PAM Process and Its Waveforms. To Study The Demodulation ofDocument60 pagesPluse Amplitude Modulation: AIM:-To Study The PAM Process and Its Waveforms. To Study The Demodulation ofSrikanth GampalaNo ratings yet
- Impedance MatchingDocument7 pagesImpedance MatchingchinchouNo ratings yet
- Control System Engineering: Lab Report 01Document11 pagesControl System Engineering: Lab Report 01Zain UL ABIDINNo ratings yet
- M65850P/FP: Digital Echo (Digital Delay)Document12 pagesM65850P/FP: Digital Echo (Digital Delay)ahmedNo ratings yet
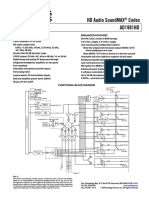
- HD Audio Soundmax Codec Ad1981Hd: Features Enhanced FeaturesDocument16 pagesHD Audio Soundmax Codec Ad1981Hd: Features Enhanced FeatureseloigneeNo ratings yet
- Modulation and Frequency Synthesis X Digital Wireless RadioDocument233 pagesModulation and Frequency Synthesis X Digital Wireless Radiolcnblzr3877No ratings yet
- Impulse Response and Its Properties of Various LTI SystemsDocument5 pagesImpulse Response and Its Properties of Various LTI SystemsCangkang SainsNo ratings yet
- Precision Amplifiers (V 1 MV, Bandwidth 50 MHZ)Document30 pagesPrecision Amplifiers (V 1 MV, Bandwidth 50 MHZ)JCMNo ratings yet