You might also like
- Files Homeworks Sol HW3 Coe 444 072Document2 pagesFiles Homeworks Sol HW3 Coe 444 072Wong VoonyeeNo ratings yet
- Engineering Mechanics Dynami̇cs PDFDocument746 pagesEngineering Mechanics Dynami̇cs PDFcemoksz92% (12)
- Final Year Project ProposalDocument1 pageFinal Year Project ProposalAmirul AizatNo ratings yet
- Operating Systems Question Bank 102309064412 1Document4 pagesOperating Systems Question Bank 102309064412 1Malebogo BabutsiNo ratings yet
- How To Compile Avl On Windows Using MinGW Without X 11 LibraryDocument2 pagesHow To Compile Avl On Windows Using MinGW Without X 11 LibraryPaul Pipi OkonkwoNo ratings yet
- Powered Manned Ornithopter: Project Report ME597 Bio-Inspired RoboticsDocument22 pagesPowered Manned Ornithopter: Project Report ME597 Bio-Inspired RoboticsSagar Kumar TurukNo ratings yet
- Ms 98-367Document38 pagesMs 98-367Toka Barisovi BarisoviNo ratings yet
- The Grid 2: Blueprint for a New Computing InfrastructureFrom EverandThe Grid 2: Blueprint for a New Computing InfrastructureNo ratings yet
- PID Controller Design Approaches - Theory Tuning and Application To Frontier AreasDocument298 pagesPID Controller Design Approaches - Theory Tuning and Application To Frontier AreasSchreiber_Dieses100% (2)
- Industrial Robotics PDFDocument39 pagesIndustrial Robotics PDFcemoksz71% (14)
- Simpsons Personality Types - SlidesDocument38 pagesSimpsons Personality Types - SlidesAna SirbuNo ratings yet
- Positive Psychotherapy Inventory PDFDocument5 pagesPositive Psychotherapy Inventory PDFAmy Powers100% (1)
- Design of Bomber Aircraft: Department of Aeronautical Engineering Gojan School of Business and TechnologyDocument51 pagesDesign of Bomber Aircraft: Department of Aeronautical Engineering Gojan School of Business and TechnologyThilak KumarNo ratings yet
- 6 Block Cipher CryptosystemsDocument53 pages6 Block Cipher CryptosystemsHasan BadirNo ratings yet
- Research and Realization of Reflective Memory Network: 1. AbstractDocument56 pagesResearch and Realization of Reflective Memory Network: 1. AbstractAtul KumbharNo ratings yet
- Learning Material Unit 3,4Document34 pagesLearning Material Unit 3,4J.Gowri ShankarNo ratings yet
- 30 - Hansen 110607 MACC BriefingDocument25 pages30 - Hansen 110607 MACC BriefingMuhammad FayyadhNo ratings yet
- LIGA ApplicationDocument13 pagesLIGA ApplicationPiranha TourniquetNo ratings yet
- R/C Soaring Digest - Oct 2002Document20 pagesR/C Soaring Digest - Oct 2002Aviation/Space History LibraryNo ratings yet
- Aircraft Design Pro 4Document7 pagesAircraft Design Pro 4Jan ScarNo ratings yet
- Robot TechnicianDocument2 pagesRobot TechnicianJuan EstebanNo ratings yet
- Brock Technologies UAV Pneumatic Catapult BrochureDocument1 pageBrock Technologies UAV Pneumatic Catapult BrochureUAVs AustraliaNo ratings yet
- Pazmany's ProfileDocument6 pagesPazmany's ProfileLadislao PazmanyNo ratings yet
- Openswan Ipsec Work Instructions & Basic TroubleshootingDocument5 pagesOpenswan Ipsec Work Instructions & Basic TroubleshootingSergiu PlotnicuNo ratings yet
- AErodynakicDocument5 pagesAErodynakickannarockNo ratings yet
- UPDATE enDocument161 pagesUPDATE enDl FreitasNo ratings yet
- Prediction of Aerodynamic Characteristics of An Aircraft Model With and Withoutt Winglet Using Fuzzy Logic TecniqueDocument11 pagesPrediction of Aerodynamic Characteristics of An Aircraft Model With and Withoutt Winglet Using Fuzzy Logic TecniqueLee Yi YongNo ratings yet
- Syllabus For Madras University - B.com Ca 2018Document7 pagesSyllabus For Madras University - B.com Ca 2018jeganrajrajNo ratings yet
- Aeronautical EngineeringDocument12 pagesAeronautical Engineeringapi-344985599No ratings yet
- Requirements Engineering in Scrum FrameworkDocument7 pagesRequirements Engineering in Scrum FrameworkCarlos QueirosNo ratings yet
- FAA Review of Construction Plans and SpecificationsDocument11 pagesFAA Review of Construction Plans and SpecificationsAnonymous vh1f95o8No ratings yet
- AE2406 Lab ManualDocument73 pagesAE2406 Lab ManualSathya NarayananNo ratings yet
- Luento 41001 DatabDocument16 pagesLuento 41001 DatabFran GaritaNo ratings yet
- Corba Rmi DcomDocument27 pagesCorba Rmi DcomVeeresh BaligeriNo ratings yet
- File Design AlternativesDocument5 pagesFile Design AlternativesRonaliza Gayatin100% (1)
- Ncrit Thesis - Implementation of A New Transition Prediction Method in XfoilDocument168 pagesNcrit Thesis - Implementation of A New Transition Prediction Method in XfoilDavid Jiménez MenaNo ratings yet
- Homebuilt Kit Aircraft Construction Details & Article LibraryDocument4 pagesHomebuilt Kit Aircraft Construction Details & Article LibraryChukkaNo ratings yet
- Flight Dynamics Engineering Simulator - An OverviewDocument16 pagesFlight Dynamics Engineering Simulator - An OverviewShuhaimi MansorNo ratings yet
- Design Considerations: The Centerline-Thrust IssueDocument4 pagesDesign Considerations: The Centerline-Thrust Issueabit1962No ratings yet
- AE 1301 Flight DynamicsDocument20 pagesAE 1301 Flight DynamicsDhinakaran VeemanNo ratings yet
- Design and Manufacture of Umanned Aerial Vehicles (UAV) Wing Structure Using Composite MaterialsDocument11 pagesDesign and Manufacture of Umanned Aerial Vehicles (UAV) Wing Structure Using Composite MaterialsPetraKrhačNo ratings yet
- Nixus TehachapiDocument52 pagesNixus TehachapiPauloIscoldNo ratings yet
- A1 2 6 Airfoil Simulation and Test by Javier PrietoDocument4 pagesA1 2 6 Airfoil Simulation and Test by Javier Prietoapi-2689971630% (1)
- Priority EncoderDocument7 pagesPriority EncoderAlinChanNo ratings yet
- Reducing Wave DragDocument43 pagesReducing Wave DragJaredSagagaNo ratings yet
- Identifying Phases of FlightDocument21 pagesIdentifying Phases of FlightAbbas sabbarNo ratings yet
- Me 1000RW PDFDocument25 pagesMe 1000RW PDFCarlaine Martins VieiraNo ratings yet
- 25 Digital20 Avionics Pastor PDFDocument9 pages25 Digital20 Avionics Pastor PDF083898025012No ratings yet
- Typical Avionics Sub SystemsWorld Sensor and Task AutomationDocument3 pagesTypical Avionics Sub SystemsWorld Sensor and Task AutomationvickyNo ratings yet
- Lab 1.2.7 Wireless Component and Media IdentificationDocument13 pagesLab 1.2.7 Wireless Component and Media IdentificationfathiwestNo ratings yet
- LIGA and Its ApplicationsDocument484 pagesLIGA and Its ApplicationsRaniero FalzonNo ratings yet
- Summary Modul AvionicDocument13 pagesSummary Modul AvionicAgung PriyanggaNo ratings yet
- Report - Design of A Personal Aerial VehicleDocument86 pagesReport - Design of A Personal Aerial Vehicletdit84No ratings yet
- Manual NsisDocument252 pagesManual NsisVasco Graça0% (1)
- Static Testing For Composite Wing of A Two-SeaterDocument8 pagesStatic Testing For Composite Wing of A Two-SeatercemocanaysunNo ratings yet
- M S 01 Intro Intro MotivationDocument13 pagesM S 01 Intro Intro MotivationBomezzZ EnterprisesNo ratings yet
- The E-Fan All Electrical Aircraft Demonstrator and Its IndustrializationDocument6 pagesThe E-Fan All Electrical Aircraft Demonstrator and Its Industrializationsj100% (2)
- Blue Gene PROJECTDocument16 pagesBlue Gene PROJECTBhanu Sai KolakaletiNo ratings yet
- Design FundamentalsDocument34 pagesDesign FundamentalsJAGUNo ratings yet
- Aircraft Landing Gear System: Presented By: Rishikesh K. Singh Roll No. 134103054 Guided by Dr. Ujjwal Kumar SahaDocument39 pagesAircraft Landing Gear System: Presented By: Rishikesh K. Singh Roll No. 134103054 Guided by Dr. Ujjwal Kumar SahaindahNo ratings yet
- Requirement Management ProcessDocument26 pagesRequirement Management ProcessMir JamalNo ratings yet
- Network Infrastructure Lesson 2Document90 pagesNetwork Infrastructure Lesson 2Rukiah Lei DeeNo ratings yet
- Lecture 9 - Modeling, Simulation, and Systems EngineeringDocument40 pagesLecture 9 - Modeling, Simulation, and Systems EngineeringmorolosusNo ratings yet
- Processes With Deadtime, Internal Model ControlDocument19 pagesProcesses With Deadtime, Internal Model ControlChristianaPrasetyaNo ratings yet
- Lecture9 IMCDocument17 pagesLecture9 IMCAudrey Patrick KallaNo ratings yet
- Petri Nets - ApplicationsDocument762 pagesPetri Nets - ApplicationscemokszNo ratings yet
- Recent Advances in Robust Control - Novel Approaches and Design MethodsDocument474 pagesRecent Advances in Robust Control - Novel Approaches and Design MethodscemokszNo ratings yet
- Fuzzy SystemsDocument226 pagesFuzzy SystemsZelalem GirmaNo ratings yet
- Model Predictive ControlDocument312 pagesModel Predictive ControlSyamsul Rizal Abd ShukorNo ratings yet
- Frontiers of Model Predictive ControlDocument168 pagesFrontiers of Model Predictive ControlcemokszNo ratings yet
- Frontiers in Advanced Control SystemsDocument290 pagesFrontiers in Advanced Control SystemsSchreiber_DiesesNo ratings yet
- Fuzzy Logic - Controls Concepts Theories and ApplicationsDocument428 pagesFuzzy Logic - Controls Concepts Theories and ApplicationsSchreiber_Dieses100% (3)
- Electric Machines and DrivesDocument274 pagesElectric Machines and Drivesachut01100% (1)
- Fuzzy Inference System - Theory and ApplicationsDocument518 pagesFuzzy Inference System - Theory and ApplicationsSchreiber_DiesesNo ratings yet
- Automotive Transmission - Lecture Notes Complete PDFDocument156 pagesAutomotive Transmission - Lecture Notes Complete PDFcemokszNo ratings yet
- Industrial Robotics Theory Modelling and ControlDocument964 pagesIndustrial Robotics Theory Modelling and Controlusmani.yusuf75% (4)
- Worm Gear PDFDocument15 pagesWorm Gear PDFcemoksz100% (6)
- 2014 Book TheEightInternationalConferencDocument529 pages2014 Book TheEightInternationalConferencAna-Maria Vasilache100% (1)
- Validity and Reliability of An Adapted Arabic VersDocument9 pagesValidity and Reliability of An Adapted Arabic Versnehla rmadiNo ratings yet
- 77 170 - 2010 Process To Instrument ValvesDocument12 pages77 170 - 2010 Process To Instrument ValvespradeepNo ratings yet
- APPLICATION OF COLD PLASMA IN FOOD INDUSTRY FinalDocument18 pagesAPPLICATION OF COLD PLASMA IN FOOD INDUSTRY Finalprachi mahajanNo ratings yet
- Hidden FiguresDocument3 pagesHidden FiguresDrnNo ratings yet
- Progress, Coexistence, and Intellectual FreedomDocument21 pagesProgress, Coexistence, and Intellectual FreedomrunningturtleNo ratings yet
- Micrologix Lab 1Document28 pagesMicrologix Lab 1Fernando Jaime Alonso MartínezNo ratings yet
- 60 HeadingsDocument132 pages60 HeadingsAbbos KhasanOffNo ratings yet
- Implementing Switch Debounce by Code in Embedded System DesignDocument3 pagesImplementing Switch Debounce by Code in Embedded System DesignOliver DennisNo ratings yet
- 0580 Probability Teaching Pack v1Document41 pages0580 Probability Teaching Pack v1Dennis OtienoNo ratings yet
- Hi Roller Custom Accessories Press-1Document12 pagesHi Roller Custom Accessories Press-1wald84No ratings yet
- The Development of Science and Technology During The Spanish RegimeDocument3 pagesThe Development of Science and Technology During The Spanish RegimeLady of the Light100% (2)
- WEG Guide To Explosive Atmospheres 50042119 Brochure English WebDocument1 pageWEG Guide To Explosive Atmospheres 50042119 Brochure English Webbenditasea3352100% (1)
- Dap and Dar Week1Document7 pagesDap and Dar Week1Colette Marie PerezNo ratings yet
- Kelly, Louise Lings, IanDocument40 pagesKelly, Louise Lings, IanLiya liyaNo ratings yet
- Dev of TL-5 Concrete BarrierDocument368 pagesDev of TL-5 Concrete Barrierofmedina100% (1)
- Air Con Elements PDFDocument6 pagesAir Con Elements PDFJerico LlovidoNo ratings yet
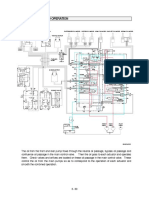
- Diagramas de Operacionn Conbindas en Sistema HidraulicoDocument5 pagesDiagramas de Operacionn Conbindas en Sistema Hidraulicomarcos.lopes36291861No ratings yet
- Why Asset Integrity Implementation FailsDocument2 pagesWhy Asset Integrity Implementation Failsmohsen m.aghabeglouNo ratings yet
- Gear BoxDocument5 pagesGear Boxxfile34100% (1)
- Employee Wellbeing ProgramDocument5 pagesEmployee Wellbeing ProgramManish SharmaNo ratings yet
- PLTW AR IntroToMechanismsPowerPointDocument39 pagesPLTW AR IntroToMechanismsPowerPointAbdulsalam OmotoshoNo ratings yet
- Muskingam Routing PDFDocument35 pagesMuskingam Routing PDFDario PrataNo ratings yet
- Course Book: 2. Mina and The Dinosaurs Lesson (Summary)Document4 pagesCourse Book: 2. Mina and The Dinosaurs Lesson (Summary)rashi bakshNo ratings yet
- Fce Cambridge First Certificate Writing Part One Useful PhrasesDocument8 pagesFce Cambridge First Certificate Writing Part One Useful PhrasesMariela Belén Rivas100% (2)
- Mechanical Interview QuestionsDocument24 pagesMechanical Interview QuestionsSurya Kiran75% (4)
- Motor Protection RequirementsDocument84 pagesMotor Protection RequirementsJellyn Base100% (1)
- 4 Writing Technical Reports Across ProfessionDocument31 pages4 Writing Technical Reports Across ProfessionEugene Kurt Cahilsot7No ratings yet