You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Collection of Articles (Refuting Shia)Document179 pagesCollection of Articles (Refuting Shia)Islam Iman IhsanNo ratings yet
- Btech Computer SC Engg 19 20Document138 pagesBtech Computer SC Engg 19 20Divyanshu GuptaNo ratings yet
- Schneider Electric - PowerLogic-PM200 - PM200MGDocument3 pagesSchneider Electric - PowerLogic-PM200 - PM200MGMarcio Erondir MarquesNo ratings yet
- Media Entrepreneurship Syllabus, Spring 2018Document4 pagesMedia Entrepreneurship Syllabus, Spring 2018Jake BatsellNo ratings yet
- Honda City 2023 PHDocument9 pagesHonda City 2023 PHbhimohit41No ratings yet
- Hashing PPTDocument39 pagesHashing PPTharshvardhanshinde.2504No ratings yet
- Toshiba Aplio XG User Manual (ОСНОВНЫЕ ПОЛОЖЕНИЯ)Document210 pagesToshiba Aplio XG User Manual (ОСНОВНЫЕ ПОЛОЖЕНИЯ)RSX SNo ratings yet
- CHG0071604Document18 pagesCHG0071604Luis Carlos CelyNo ratings yet
- EE6711 Power System Simulation Lab Manual R2013Document101 pagesEE6711 Power System Simulation Lab Manual R2013gokulchandru100% (1)
- DNS RecordsDocument10 pagesDNS Recordsamlesh80No ratings yet
- Solar Power System Proposal For Sinag PawnshopDocument6 pagesSolar Power System Proposal For Sinag PawnshopBLAZE TECHNo ratings yet
- Takehome atDocument4 pagesTakehome atJoel JimenezNo ratings yet
- BOQ Pack 4Document36 pagesBOQ Pack 4Prachi DongreNo ratings yet
- Oxford IB Diploma Programme IB Economics Course Book (JOCELYN. DORTON BLINK (IAN.), Ian Dorton)Document601 pagesOxford IB Diploma Programme IB Economics Course Book (JOCELYN. DORTON BLINK (IAN.), Ian Dorton)sophieperervinNo ratings yet
- S10-Technical Analysis PDFDocument32 pagesS10-Technical Analysis PDFAjay SutharNo ratings yet
- Payement of Wage Act, 1936 Unit-4Document8 pagesPayement of Wage Act, 1936 Unit-4rpsinghsikarwarNo ratings yet
- Minor ProjectDocument64 pagesMinor Projectaroraankita211No ratings yet
- Product Brochure of Speciality-ProductsDocument13 pagesProduct Brochure of Speciality-ProductsMADDI MADHAV.No ratings yet
- Letter To IHSB Parents-1.7.20 PDFDocument1 pageLetter To IHSB Parents-1.7.20 PDFAdor RahmanNo ratings yet
- Vision Without Action Is A Daydream. Action Without Vision Is A Nightmare.Document29 pagesVision Without Action Is A Daydream. Action Without Vision Is A Nightmare.yebegashetNo ratings yet
- SCM Test 1Document6 pagesSCM Test 1Revathy KrishnaNo ratings yet
- PEDAL (Manuscript)Document9 pagesPEDAL (Manuscript)Mel Francis SeparaNo ratings yet
- Certificate of Analysis ListDocument3 pagesCertificate of Analysis ListJorge Luis ParraNo ratings yet
- Personal Information Form - Nguyen Van Ly 1Document19 pagesPersonal Information Form - Nguyen Van Ly 1TuTuy AnNo ratings yet
- HOLSET - Problemas en El Turbocargador PDFDocument1 pageHOLSET - Problemas en El Turbocargador PDFJuan Carlos Constanzo PincheiraNo ratings yet
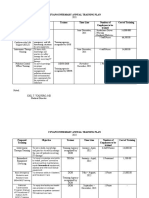
- Cuyapo Infirmary Annual Training Plan Proposed Training Objective Trainer Time Line Number of Employees To Be Trained Cost of TrainingDocument3 pagesCuyapo Infirmary Annual Training Plan Proposed Training Objective Trainer Time Line Number of Employees To Be Trained Cost of TrainingCuyapo Infirmary Lying-In HospitalNo ratings yet
- A Solar-Powered Buck/boost Battery Charger: TechnicalDocument3 pagesA Solar-Powered Buck/boost Battery Charger: TechnicalBookymanNo ratings yet
- Succession ReviewerDocument109 pagesSuccession Reviewermonique_noa100% (8)
- As-3 The Online EnvironmentDocument5 pagesAs-3 The Online EnvironmentKavishka TrimanneNo ratings yet
- Ad-A234 566Document186 pagesAd-A234 566Hussein BeqaiNo ratings yet