You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- API 650 Tank Design CalculationDocument8 pagesAPI 650 Tank Design Calculationmail_younes659283% (29)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Jdas enDocument87 pagesJdas enharounNo ratings yet
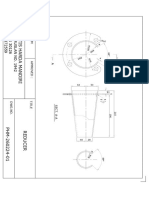
- ReducerDocument1 pageReducerjimmy_d_nasutionNo ratings yet
- Design of Lifting Lug: InputsDocument4 pagesDesign of Lifting Lug: InputsBahtiar Anak LaNangNo ratings yet
- Serial 6-Axis Accelerometer - Gyroscope Module For Arduino Wiki - DFRobotDocument4 pagesSerial 6-Axis Accelerometer - Gyroscope Module For Arduino Wiki - DFRobotjimmy_d_nasutionNo ratings yet
- Design of Lifting Lug: InputsDocument4 pagesDesign of Lifting Lug: InputsBahtiar Anak LaNangNo ratings yet
- Ble-Nano Operation Manual v.1.6Document43 pagesBle-Nano Operation Manual v.1.6jimmy_d_nasutionNo ratings yet
- Solution To Problem 133 Pressure VesselDocument1 pageSolution To Problem 133 Pressure Vesseljimmy_d_nasutionNo ratings yet
- Topik 5 - Pressure Vessel Head DesignDocument8 pagesTopik 5 - Pressure Vessel Head Designjimmy_d_nasutionNo ratings yet
- New - Reinforcement of NozzleDocument31 pagesNew - Reinforcement of NozzleChagar HarshpalNo ratings yet
- Topik 4 - Stresses in PV - Thick-Walled PVDocument5 pagesTopik 4 - Stresses in PV - Thick-Walled PVjimmy_d_nasutionNo ratings yet
- Topik 2 - Klasifikasi PVDocument9 pagesTopik 2 - Klasifikasi PVjimmy_d_nasutionNo ratings yet
- Otomatisasi RumahDocument40 pagesOtomatisasi Rumahjimmy_d_nasutionNo ratings yet
- Topik 3 - Stresses in PV - Thin-Walled PVDocument16 pagesTopik 3 - Stresses in PV - Thin-Walled PVjimmy_d_nasutionNo ratings yet
- Topik 2 - Thin & Thick Walled PVDocument9 pagesTopik 2 - Thin & Thick Walled PVjimmy_d_nasutionNo ratings yet
- Remote PosterDocument1 pageRemote Posterjimmy_d_nasutionNo ratings yet
- UR5 & KR10 & UR3 Manipulator 3D (Recovered)Document9 pagesUR5 & KR10 & UR3 Manipulator 3D (Recovered)jimmy_d_nasutionNo ratings yet
- Solution To Problem 133 Pressure VesselDocument1 pageSolution To Problem 133 Pressure Vesseljimmy_d_nasutionNo ratings yet
- Semi Trailer - 80 TONDocument1 pageSemi Trailer - 80 TONjimmy_d_nasutionNo ratings yet
- Bridge Formula Axles Loads PDFDocument2 pagesBridge Formula Axles Loads PDFjimmy_d_nasutionNo ratings yet
- 4159 9008 1 PBDocument12 pages4159 9008 1 PBjimmy_d_nasutionNo ratings yet
- DIY Arduino Home AutomationDocument11 pagesDIY Arduino Home AutomationErshad Shafi Ahmed100% (1)
- Control Chronos WatchDocument3 pagesControl Chronos Watchjimmy_d_nasutionNo ratings yet
- Bridge Formula Axles Loads PDFDocument2 pagesBridge Formula Axles Loads PDFjimmy_d_nasutionNo ratings yet
- Wowwee RovioDocument4 pagesWowwee Roviojimmy_d_nasutionNo ratings yet
- Reba ViDocument13 pagesReba ViJaques ValleNo ratings yet
- Transient Speed Vibration AnalysisDocument34 pagesTransient Speed Vibration AnalysistylerdurdaneNo ratings yet
- Predictive MaintenanceDocument17 pagesPredictive Maintenancejimmy_d_nasutionNo ratings yet
- Behind Pump VibrationsDocument30 pagesBehind Pump Vibrationsfahrian05No ratings yet
- Interpreting Vibration Spectrum and TWF PatternsDocument46 pagesInterpreting Vibration Spectrum and TWF PatternsbwelzNo ratings yet
- Sisnet Uid 2 0Document62 pagesSisnet Uid 2 0MMSRITNo ratings yet
- Oracle Retail: 24x7 Inventory Availability Release 14.0 December 2013Document16 pagesOracle Retail: 24x7 Inventory Availability Release 14.0 December 2013Amar DharNo ratings yet
- ABS User ManualDocument40 pagesABS User ManualAntonio NavarreteNo ratings yet
- Debugging Techniques For Embedded SystemsDocument9 pagesDebugging Techniques For Embedded SystemsJames DoolinNo ratings yet
- AC ASP8000 Brouchure 1 1Document9 pagesAC ASP8000 Brouchure 1 1Bryan BayacaNo ratings yet
- 1 - MM-Introduction To MMDocument25 pages1 - MM-Introduction To MMمصطفي فتحي أبوالعزمNo ratings yet
- NCSIMUL DNC Machine Status MonitoringDocument2 pagesNCSIMUL DNC Machine Status Monitoringluli pejaNo ratings yet
- Activity # 7: Embedded SystemDocument52 pagesActivity # 7: Embedded Systemsibhat mequanintNo ratings yet
- What Is Batch ProcessingDocument6 pagesWhat Is Batch ProcessingSaad MajeedNo ratings yet
- Short Type S and Answers On: Operating SystemDocument31 pagesShort Type S and Answers On: Operating SystemRAJESHNo ratings yet
- Adaptive Cruise Control Systems in A CarDocument28 pagesAdaptive Cruise Control Systems in A CarsakthideepaNo ratings yet
- Buffer Space Allocation For Real-Time Channels in A Packet-Switching NetworkDocument21 pagesBuffer Space Allocation For Real-Time Channels in A Packet-Switching NetworkqhidNo ratings yet
- P01 RTLinuxDocument26 pagesP01 RTLinuxSudheer Reddy100% (1)
- Real-Time Systems Architecture Scheduling and ApplicationDocument348 pagesReal-Time Systems Architecture Scheduling and ApplicationcemokszNo ratings yet
- Bca 3Document147 pagesBca 3Krishna KumarNo ratings yet
- Operating System For OnlineDocument114 pagesOperating System For OnlineAmity-elearning100% (4)
- 09 Energy ManagementDocument44 pages09 Energy ManagementRafael FurquimNo ratings yet
- Cs 8Document106 pagesCs 8Cooke Edafe ClementNo ratings yet
- Aspen InfoPlus.21 Family BrochureDocument8 pagesAspen InfoPlus.21 Family Brochure김형진100% (2)
- Manual HDCVI DVR SeriesDocument144 pagesManual HDCVI DVR SerieshansturNo ratings yet
- EC2042 Embedded and Real Time Systems Lecture NotesDocument79 pagesEC2042 Embedded and Real Time Systems Lecture NotesPraveen ChellapandianNo ratings yet
- Design of An Embedded Surveillance System Using Raspberry PiDocument6 pagesDesign of An Embedded Surveillance System Using Raspberry PiInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- VLSI, VLSI System & VLSI System DesignDocument26 pagesVLSI, VLSI System & VLSI System Designrohit_sreerama4040No ratings yet
- Anomaly Detection Using Machine LearningDocument4 pagesAnomaly Detection Using Machine LearningvivekreddyNo ratings yet
- 300+ TOP Operating System LAB VIVA Questions and AnswersDocument25 pages300+ TOP Operating System LAB VIVA Questions and AnswersRohit AnandNo ratings yet
- 75-78 SRAS21 - 72dpiDocument4 pages75-78 SRAS21 - 72dpiLợi Nguyễn VănNo ratings yet
- BCG Digital in Engineering and Construction Mar 2016Document22 pagesBCG Digital in Engineering and Construction Mar 2016Prathipati Naga Sankara KarthikeyaNo ratings yet
- Chapter 03 CPU Scheduling NewDocument40 pagesChapter 03 CPU Scheduling NewMickNo ratings yet
- RTOS ComparisonDocument4 pagesRTOS ComparisonPrabhakar CharyNo ratings yet