You might also like
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- 1 S5 PDFDocument4 pages1 S5 PDF너굴No ratings yet
- 1Document4 pages1너굴No ratings yet
- The Jordan-H Older TheoremDocument6 pagesThe Jordan-H Older Theorem너굴No ratings yet
- Solutions of Exercise Sheet 5Document7 pagesSolutions of Exercise Sheet 5너굴No ratings yet
- A Funny Fact: Real CharactersDocument2 pagesA Funny Fact: Real Characters너굴No ratings yet
- 8 PDFDocument2 pages8 PDF너굴No ratings yet
- Herstein: Topics in Algebra - Definition, Examples and Preliminary Lemmas of GroupsDocument1 pageHerstein: Topics in Algebra - Definition, Examples and Preliminary Lemmas of Groups너굴No ratings yet
- 1 (1) 2 PDFDocument3 pages1 (1) 2 PDF너굴No ratings yet
- Emmanuel BreuillardDocument8 pagesEmmanuel Breuillard너굴No ratings yet
- H 34 SolDocument2 pagesH 34 Sol너굴No ratings yet
- Group TheoryDocument9 pagesGroup Theory너굴No ratings yet
- Probability Theory Lecture Notes PDFDocument25 pagesProbability Theory Lecture Notes PDF너굴No ratings yet
- An Introduction To Transversality PDFDocument10 pagesAn Introduction To Transversality PDF너굴No ratings yet
- Transversality PDFDocument4 pagesTransversality PDF너굴No ratings yet
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- A Case of Uterine Fibroid Managed by Homoeopathy.20210808065707Document5 pagesA Case of Uterine Fibroid Managed by Homoeopathy.20210808065707200408203002No ratings yet
- 50 Interview Questions For Adryenn AshleyDocument5 pages50 Interview Questions For Adryenn AshleyAdryenn AshleyNo ratings yet
- Graduate Alumni of Elvel School Class of 1991Document3 pagesGraduate Alumni of Elvel School Class of 1991Ramón SilvaNo ratings yet
- CaseLaw RundownDocument1 pageCaseLaw RundownTrent WallaceNo ratings yet
- 125) League of Cities of The Philippines vs. COMELEC (G.R. No. 176951, April 12, 2011) 2Document35 pages125) League of Cities of The Philippines vs. COMELEC (G.R. No. 176951, April 12, 2011) 2Carmel Grace KiwasNo ratings yet
- Brand Relevance - 1Document2 pagesBrand Relevance - 1Ayan PandaNo ratings yet
- Q1 Summary of RecordsDocument1 pageQ1 Summary of RecordsOikawa MinamahalNo ratings yet
- Azhari, Journal 7 2011Document11 pagesAzhari, Journal 7 2011Khoirunnisa ANo ratings yet
- E-Tech DLL Blank - Lesson 2-Nov 20-23Document3 pagesE-Tech DLL Blank - Lesson 2-Nov 20-23Julie Ann SuarezNo ratings yet
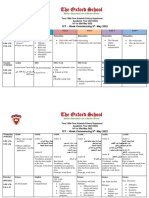
- Term 3 Mid-Term Assessment ScheduleDocument9 pagesTerm 3 Mid-Term Assessment ScheduleRabia MoeedNo ratings yet
- M03 Study GuideDocument5 pagesM03 Study GuideMartina Vegel DavidsonNo ratings yet
- DD McqsDocument21 pagesDD McqsSyeda MunazzaNo ratings yet
- FIDP Business Ethics and Social Responsibility PDFDocument7 pagesFIDP Business Ethics and Social Responsibility PDFRachell Mae Bondoc 1No ratings yet
- Design Thinking For Social Innovation Ideo: Special ReportDocument4 pagesDesign Thinking For Social Innovation Ideo: Special ReportmileinesiqueiraNo ratings yet
- 434-Article Text-2946-1-10-20201113Document9 pages434-Article Text-2946-1-10-20201113Rian Armansyah ManggeNo ratings yet
- Giving Counsel PDFDocument42 pagesGiving Counsel PDFPaul ChungNo ratings yet
- Life in The Middle Ages Unit Study - Grade 8Document21 pagesLife in The Middle Ages Unit Study - Grade 8HCSLearningCommonsNo ratings yet
- E-Fim OTNM2000 Element Management System Operation GuideDocument614 pagesE-Fim OTNM2000 Element Management System Operation GuidePrabin Mali86% (7)
- 10 Tips For Better Legal WritingDocument12 pages10 Tips For Better Legal WritingYvzNo ratings yet
- Interjections Worksheet PDFDocument1 pageInterjections Worksheet PDFLeonard Patrick Faunillan Bayno100% (1)
- RMJ PDF Min v2 PDFDocument17 pagesRMJ PDF Min v2 PDFAli AhmadNo ratings yet
- B1 Adjectives Ending in - ED and - ING AD006: Worksheets - English-Grammar - atDocument2 pagesB1 Adjectives Ending in - ED and - ING AD006: Worksheets - English-Grammar - atLucía Di CarloNo ratings yet
- Subject: Managerial Accounting Topic: Total Quality Management Reporter: Romalyn R. PurificacionDocument2 pagesSubject: Managerial Accounting Topic: Total Quality Management Reporter: Romalyn R. Purificacionromalyn purificacionNo ratings yet
- English 3 Reading Nat 1Document23 pagesEnglish 3 Reading Nat 1robelynemendoza17No ratings yet
- Against The Legalization of Drugs - James Q. WilsonDocument9 pagesAgainst The Legalization of Drugs - James Q. WilsonOhLord VaderNo ratings yet
- What Is The Importance of Research in Language Development?Document2 pagesWhat Is The Importance of Research in Language Development?Kyle Joshua VerdidaNo ratings yet
- 158 Carino vs. CADocument2 pages158 Carino vs. CAFrancesca Isabel Montenegro67% (3)
- Best Resume Template CanadaDocument4 pagesBest Resume Template Canadaafjwdprlzaxewj100% (2)
- Comparative and Superlative AdjectivesDocument11 pagesComparative and Superlative AdjectivesUri Leandro MuñozNo ratings yet
- EF 3rd Upper Interm File 8 TEST PDFDocument4 pagesEF 3rd Upper Interm File 8 TEST PDFfriboNo ratings yet