You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5814)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1092)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (844)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Encuadernación No AdhesivaDocument324 pagesEncuadernación No Adhesivamarixpopi100% (3)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- HOME ECONOMICS Grade 10 12 PDFDocument80 pagesHOME ECONOMICS Grade 10 12 PDFDaevis Mabenga67% (3)
- Angel Zialor - The Black GrimoireDocument37 pagesAngel Zialor - The Black GrimoireJNS100% (4)
- Arc Resistance CalculationDocument6 pagesArc Resistance CalculationS Naved MasoodNo ratings yet
- Essay On People Teams and GroupsDocument14 pagesEssay On People Teams and GroupsAvirook Bhanot100% (1)
- Channel Migration and Incision On The Beatton Rlver: by Gerald C. Nanson and Edward J. HickinDocument11 pagesChannel Migration and Incision On The Beatton Rlver: by Gerald C. Nanson and Edward J. HickinSandesh PoudelNo ratings yet
- Inpho GT Lom KMDocument11 pagesInpho GT Lom KMlash73752No ratings yet
- Sbs V1.1-Compliant Gas Gauge With Led Delay: Features DescriptionDocument70 pagesSbs V1.1-Compliant Gas Gauge With Led Delay: Features DescriptionGabi Si Florin JalencuNo ratings yet
- Guide Geothermal Energy and The EnvironmentDocument88 pagesGuide Geothermal Energy and The EnvironmentAldwin EncarnacionNo ratings yet
- Everx Flow World of Proof StudyDocument20 pagesEverx Flow World of Proof StudyRichardZapataChávezNo ratings yet
- Kerrigan Community Learning Center: General Mathematics Class OrientationDocument17 pagesKerrigan Community Learning Center: General Mathematics Class OrientationFrances CarvajalNo ratings yet
- CP Components-Data-Sheets-ArDocument19 pagesCP Components-Data-Sheets-ArAtul HingnekarNo ratings yet
- Atmospheric Correction of Satellite Images Using Python - by ASLAN - Nerd For Tech - Feb, 2021 - MediumDocument18 pagesAtmospheric Correction of Satellite Images Using Python - by ASLAN - Nerd For Tech - Feb, 2021 - MediumDirga DanielNo ratings yet
- Quezonian Educational College, Inc.: - Introduction To LinguisticsDocument6 pagesQuezonian Educational College, Inc.: - Introduction To LinguisticsBelle VillasinNo ratings yet
- Organizational BehaviourDocument11 pagesOrganizational BehaviourShefali PawarNo ratings yet
- Group DynamicsDocument30 pagesGroup DynamicsJaspreet KaurNo ratings yet
- Admission Notification 2024-2025Document12 pagesAdmission Notification 2024-2025jsbska88No ratings yet
- Qualitative VS QuantitatveDocument22 pagesQualitative VS QuantitatveTroy DanielsNo ratings yet
- CHAPTER 1 - Planning As A Management FunctionDocument22 pagesCHAPTER 1 - Planning As A Management FunctionLester BalagotNo ratings yet
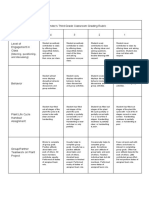
- Grading Rubric Edu 214 Natalie FernandezDocument2 pagesGrading Rubric Edu 214 Natalie Fernandezapi-524724849No ratings yet
- G11 EnglishDocument15 pagesG11 EnglishSay the name seventeenNo ratings yet
- Astounding UK (1944-08)Document68 pagesAstounding UK (1944-08)Víctor CondeNo ratings yet
- Nguyen-2022-Vietnamese EFL-ESL Learners' Attitudes Towards British English Versus American English AccentsDocument17 pagesNguyen-2022-Vietnamese EFL-ESL Learners' Attitudes Towards British English Versus American English AccentsPhương Thanh NguyễnNo ratings yet
- Andrei Catalin Disca Roman Sites and DisDocument27 pagesAndrei Catalin Disca Roman Sites and DisBritta BurkhardtNo ratings yet
- HW 4.10 - Reading 10Document4 pagesHW 4.10 - Reading 10Long ĐỗNo ratings yet
- Earthquake Analysis Based On Eurocode 8 Static Lateral Force MethodDocument4 pagesEarthquake Analysis Based On Eurocode 8 Static Lateral Force MethodAnonymous O404LiV4CNo ratings yet
- DAB - Lesson 08 (SE)Document61 pagesDAB - Lesson 08 (SE)thanh vu ducNo ratings yet
- Research Final Paper TemplateDocument16 pagesResearch Final Paper TemplateJohn Lui OctoraNo ratings yet
- Morse, Jaw Crusher - DatasheetDocument3 pagesMorse, Jaw Crusher - DatasheetSalvador RocaNo ratings yet
- Nitrogen Cycle - BioNinjaDocument3 pagesNitrogen Cycle - BioNinjaDaniel WalshNo ratings yet