Professional Documents
Culture Documents
Wu1989 PDF
Wu1989 PDF
Uploaded by
mabn79Original Title
Copyright
Available Formats
Share this document
Did you find this document useful?
Is this content inappropriate?
Report this DocumentCopyright:
Available Formats
Wu1989 PDF
Wu1989 PDF
Uploaded by
mabn79Copyright:
Available Formats
VALIDITY O F S M I T H M O D E L
IN P I L E DRIVING ANALYSIS
By A. K. H. Wu, 1 R. L. Kuhlemeyer,2 and C. W. S. To 3
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
ABSTRACT: Smith developed a wave equation method by idealizing a pile-soil
system as a series of masses and springs for the analyses of complicated pile driv-
ing problems. The soil parameters used in this method were proposed on the basis
of his experience in piling practice and hence, were recognized to be relatively
crude from soil mechanics aspects. This paper presents results of an analytical
procedure for determining the shaft damping parameter and relating it to the soil
properties: (1) Shear modulus; and (2) shear strength. A dynamic finite element
computer program is developed to analyze the pile shaft resistance by using an
elasto-plastic approach; the relationship between the shaft damping parameter and
the other parameters such as pile penetration velocity, radius of yielding zone, and
force pulse duration time are also examined. It is found that the Smith damping
parameter cannot be back-calculated to be some simple constant.
INTRODUCTION
In recent years, extensive use has been made of the one-dimensional wave
equation method for the analysis and design of practical piling problems in
both onshore and offshore structures. Isaacs (1931) is believed to be the first
to recognize that the transmission of energy from hammer to pile toe would
not occur immediately during impact, and wave action occurred during pile
installation. Smith (1960) capped his earlier work by suggesting a numerical
solution of the wave equation for complicated pile driving problems and
idealized a pile-soil system as a lumped mass and spring model. Fig. 1 shows
an actual pile-soil system and the idealization of the various components in
the system. The pile is divided into a number of segments and internal springs
are inserted between the segments to account for the pile stiffness. The weights
of the segments denote the weight distribution of the pile. The soil medium
is assumed to be weightless. Each segment is attached to a spring and a
dashpot system, which represents the soil stiffness and damping resistance,
respectively. At the bottom segment, there is an extra system to account for
the toe resistance.
Fig. 2 shows the load-deformation characteristic of soil used in the Smith
wave equation analysis. The soil is assumed to be elastic, perfectly plastic.
For the soil adjacent to the pile shaft, the load-deformation is represented
by path OABCDEFG. (For the soil at the pile toe, the load deformation path
is OABCF because only compressive loading occurs around the pile toe, but
this part of the problem is not considered in this paper.) Each pile segment
in the idealized system can have its own soil mode, which consists of a
'Grad. Res. Student, Dept. of Civ. Engrg., Univ. of Calgary, 2500 University
Dr., N.W., Calgary, Alberta, Canada T2N 1N4.
2
Assoc. Prof., Dept. of Civ. Engrg., Univ. of Calgary, Calgary, Alberta, Canada.
3
Assoc. Prof., Dept. of Mech. Engrg., Univ. of Western Ontario, London, On-
tario, Canada.
Note. Discussion open until February 1, 1990. Separate discussions should be sub-
mitted for the individual papers in this symposium. To extend the closing date one
month, a written request must be filed with the ASCE Manager of Journals. The
manuscript for this paper was submitted for review and possible publication on March
18, 1988. This paper is part of the Journal of GeotechnicalEngineering, Vol. 115,
No. 9, September, 1989. ©ASCE, ISSN 0733-9410/89/0009-1285/$1.00 + $.15
per page. Paper No. 23886.
1285
J. Geotech. Engrg. 1989.115:1285-1302.
ACTUAL PILE-SOIL SYSTEM IDEALIZED PILE
s
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
INTERNAL 1 J l
SPRING
±
FIG. 1. Idealization of Pile-Soil System
spring and dashpot. Each soil model, as shown in Fig. 2, is characterized
by the static soil stiffness K which is defined as
K =— (1)
Q
in which Ru = ultimate soil resistance; and Q = soil quake (maximum elastic
deformation). The ultimate soil resistance for each pile segment is assigned
a fraction of the total pile resistance obtained from a static pile load test.
FIG. 2. Load-Deformation Characteristic of Soil
1286
J. Geotech. Engrg. 1989.115:1285-1302.
Smith proposed that Q equal to 0.1 in. (2.54 mm) should be suitable for
most soil types.
In order to take account of the dynamic loading characteristic, Smith in-
cluded a dashpot in the model that produces a force proportional to the prod-
uct of a damping parameter, J', and the pile penetration velocity. The dy-
namic resistance of the soil model is then the summation of the static resistance
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
and the damping force as
Piya = (D - D')K{\ +J'V) (2)
or
Pjyn = P«.a +J'V) (3)
in which Pdyn = dynamic soil resistance; Psla = static soil resistance; D =
total soil displacement from original position; D' = total plastic deformation;
K = soil stiffness, i.e., soil spring constant; J' — damping parameter for
pile shaft resistance (J for pile toe resistance); and V = velocity of pile shaft
(velocity of pile toe for pile toe resistance). Hirsch et al. (1970) stated that
Eq. 2 describes a type of Kelvin rheological model in which a dashpot is in
parallel with a spring and a sliding friction block. The sliding friction block
characterizes the plastic deformation of the soil. When the spring deforms
to the value of the soil quake, the sliding block will then allow no further
increase of the spring force. This is represented by paths AB and DE in Fig.
2. Based on Smith's experience, the pile toe damping and shaft damping
were suggested to be 0.15 sec/ft (0.495 s/m) and 0.05 sec/ft (0.165 s/m),
respectively. However, the recommended values of soil quake and damping
parameters were proposed on the basis of Smith's experience in practice,
but without any direct field experimental measurements. The accuracy of
these values was recognized to be relatively crude from soil mechanics as-
pects, and Smith concluded: "The knowledge of soil mechanics is incom-
plete, especially the knowledge of soil mechanics under pile-driving action.
This offers a fertile field for future investigations."
Experimental information regarding the damping parameters was sparse
prior to 1960. Coyle and Gibson (1970) conducted a triaxial impact test to
determine the soil damping parameter for sands and clays. By using Eq. 3,
the calculated damping parameter was found to vary with velocity of de-
formation. In order to obtain constant J and J' values, Eq. 3 was modified
by raising the velocity to power N as
Pdyn = PsM +JVN) (4)
For sands, N was determined to be 0.2, while 0.18 was obtained as an ac-
ceptable value for clay.
Coyle et al. (1972) performed a series of field tests to evaluate the soil
damping parameters by using a small instrumented model pile. The model
pile was designed to obtain separate measurement of skin friction and toe
loading simultaneously. The soils at the test sites included high and low
plasticity clays and silty sands. The damping parameters were determined
by using Smith's equation (Eq. 3) and the modified Smith's equation (Eq.
4). The parameters were then used to predict the bearing capacity of a full-
scale test pile. Results showed that the bearing capacity obtained by using
the modified soil model parameters was more conservative than the one ob-
tained by using Smith's soil model parameters.
1287
J. Geotech. Engrg. 1989.115:1285-1302.
Litkouhi and Poskitt (1980) suggested that it was important to consider
the nonlinearity damping property of the clay soil in the wave equation anal-
ysis. By taking account of the modified Smith's equation (Eq. 4), a labo-
ratory experiment was carried out to evaluate the damping parameter by driv-
ing a model pile into a soil sample container. Results indicated that the shaft
damping parameter J' for clay was found to be greater than that of the toe
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
damping parameter J. This finding was contrary to Smith's original pro-
posal.
Up to the present time, no investigator has attempted to evaluate Smith's
soil stiffness and damping parameters by an analytical approach. Although
a number of experimental projects have been done, the results are restricted
to certain soil types. The objective of this paper is to present results of an
analytical study for determining the shaft damping parameter as a function
of soil properties. A dynamic finite element computer program was devel-
oped to analyze the pile shaft resistance by using an elasto-plastic approach.
Due to space limitations, the finite element model will be only briefly de-
scribed herein; additional details were presented by Wu (1985). Results of
the study are presented afterwards.
FINITE ELEMENT MODEL
The pile shaft-soil system can be idealized as a simple finite element model
based on two assumptions.
1. The pile is assumed to be infinitely long, circular, and rigid such that end
effects are ignored. Hence, the vertical axisymmetric displacement of the soil is
independent of depth and the problem is one of plane strain such that a thin layer
is adequate to show the response of the system.
2. The radial displacement of the soil is negligible relative to the vertical dis-
placement. (This assumption restricts the wave energy to propagate only as a
shear wave in the radial direction.)
For convenience, these two assumptions are called assumption 1 and as-
sumption 2 hereafter. Both assumptions have been shown to give accurate
results for elastic pile, steady-state vibration problems (Kuhlemeyer 1979;
Novak 1977). The resulting model, shown in Fig. 3, is an axisymmetrical
pile shaft-soil system, with one pile element at the center and a series of
soil elements that extend outward to the boundary. The pile element is ap-
proximately rigid with a shear modulus much larger than the soil. Each node
of the soil element is connected to a dashpot which accounts for the soil
material damping. According to assumption 1, vertical nodal displacements
along OA will be identical to those along O'B and, therefore, the response
of the system can be represented by those nodes along either OA or O'B.
Each nodal point has only one degree of freedom.
In order to simulate the effect of slipping between the pile and the soil,
an axisymmetric interface element is inserted at the pile-soil interface. The
interface element has zero thickness and allows a relative displacement at
the interface when the shear stress of the element exceeds a defined yield
limit. The existence of the interface element will not affect the compatibility
of the finite element model. That is, the response of a model with an in-
1288
J. Geotech. Engrg. 1989.115:1285-1302.
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
TO TO TO TO TO TO /TO -As, TO TO TO.
_(L o /
SOIL DASHPOT ENERGY
ABSORBING
BOUNDARY
FIG. 3. Finite Element Model
terface element undergoing no slipping is identical to the response of a model
without an interface element.
Since the model is used in a dynamic analysis, determination of a general,
exact far-field boundary condition is a difficult task. If the soil model is
terminated and fixed at some distance from the axis of symmetry, the shear
wave will reflect back and forth within the soil region. Therefore, an energy-
absorbing boundary that absorbs incoming shear wave energy is required to
represent the infinite nature of the elastic far field. The formulations of var-
ious element matrices related to the model are briefly given here.
Simplified Axisymmetric Element
The simplified axisymmetric element is a modification of a general axi-
symmetric element. The pile and the soil material shown in Fig. 3 are rep-
resented by the simplified axisymmetric elements. The displacement field of
a simplified axisymmetric element, w, is commonly assumed to be a product
of two linear expressions that results in the expression
b, + b2r + b3z + b4rz . . . . (5)
in which bu bbo,
2, b 3 and b4 = unknown coefficients; and r and z = radial
b-,,
and vertical distances from the coordinate origin, respectively. From as-
sumption 1, b3z and b4rz can be deleted. From assumption 2, only vertical
displacement occurs, so the displacement in an element is the vertical dis-
placement
w = bx + b2r (6)
The coefficients bt and b2 can be written in terms of element width R, nodal
radial distances r, and rJt and nodal displacements a, and a, as
0 I -n
(7)
-l ! l
Substituting Eq. 7 into Eq. 6, the displacement field is
1
M = - [. (8)
1289
J. Geotech. Engrg. 1989.115:1285-1302.
By considering assumptions 1 and 2 it is noted that the simplified axi-
symmetric element is a simple shear element with strain vector {e} defined
as
{e} = (9)
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
From energy principles, the element stiffness matrix can be defined in
terms of the strain-displacement transformation matrix [B] and elasticity ma-
trix [D] by integrating over the volume of the element
[*] [B]T[D][B]d(vol) (10).
The strain-displacement transformation matrix [B] can be evaluated by Eq.
9, while the elasticity matrix [D] is equal to the shear modulus G. The stiff-
ness matrix for an individual element becomes
GH-n 1 -1
[k] = (rj - rf) (11)
R2
-1 1
in which H — the model thickness.
The stress vector can be written in terms of nodal displacement a, and aj
as
{cr}=[£>]{e} = - [ - l (12)
R
Note that the element has only two degrees of freedom and the displacement
variation is linear; thus, the element stress is constant throughout the ele-
ment. That means Eq. 12 represents the shear stress for any point within
the element.
The consistent mass matrix, which accounts for the actual mass distri-
bution throughout the system, is
[m] = p [N]'[N]d(vol) (13)
'vol
in which p = the mass density. Since [w] = [N]{a}, the shape function [N]
can be found by Eq. 8. The element mass matrix can be expressed as
rj-2rjn
+8r/? - 3rt +2r/, 3 - r\
TtpH
(14)
r) - 2r]r, 3rJ - Sr]n
+2rff - rf +6rjrf - rf
Simplified Interface Element
The interface element, also known as a slip element or joint element, sim-
ulates the relative movement at the pile-soil interface. The interface element
1290
J. Geotech. Engrg. 1989.115:1285-1302.
represents the junction of two dissimilar media having different material
properties. Initially, when the induced shear stress of the interface element
is less than the element yield limit, the nodes on both sides of the interface
experience no relative displacement. When the shear stress exceeds the yield
limit, the continuity of displacement will no longer be maintained, and a
relative displacement occurs at the adjacent nodes on opposite sides of the
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
element. The interface element used in this study is based on a modification
of Heuze and Barbour's model, and referred to as the simplified interface
element. The detailed presentation of the element can be found elsewhere
(Heuze and Barbour 1982), and only its general description is presented herein.
Heuze and Barbour (1982) expressed the element stiffness [k] as
[*] = 2irrt'H[B]T[D][B] ....' (15)
in which f = the r-coordinate of the interface centroid; and t' = an imaginary
element thickness. By considering only the shear component, the element
stiffness is written as
1 ! -1
[k] = 2-nrHK, (16)
1 i 1
in which Ks = the interface shear stiffness.
The stress vector {CT} of the simplified interface element can be expressed
in terms of the interface shear stiffness and the relative nodal displacement
of the nodal pairs as
W = [Ks(aj - a,)] (17)
Damping Matrix
The internal dissipation of energy in soil is often considered to be hys-
teretic damping, which is represented by the total area within the loop of
the damping force versus displacement curve for each loading cycle. Hys-
teretic damping is found to depend on the soil strain (Kim and Novak 1981;
Seed and Idriss 1970). The equation of motion with hysteretic damping may
be written in complex notation as
[MM + (1 + OQ[K]{a} = {P}eiM (18)
in which {a}, {a} = acceleration and displacement vectors, respectively; £ =
damping ratio; i = imaginary unit; to = exciting frequency; and t = time.
Assuming {a} = {X}"", where X is a real number that represents the dis-
placement amplitude, Eq. 18 can be rewritten as
[M]{d) + [CM + [K]{a} = {P}eiM (19)
and
[C]=-[K] (20)
CO
in which {a} = velocity vector. The damping ratio is highly strain dependent;
the general relation of shear strain amplitude and damping ratio follows that
proposed by Seed and Idriss (1970). Eq. 20 is only suitable for the damping
formulation in the entire system. In order to consider the damping variation
1291
J. Geotech. Engrg. 1989.115:1285-1302.
in each element, a formulation based on element matrices is used as
2£
M = - W (21)
CO
in which [c] and [k] = element damping and stiffness matrices. The element
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
damping ratio £ can be found according to the individual element strain from
the damping ratio versus shear strain amplitude curve given by Seed and
Idriss (1970). The damping matrix for the entire system is then obtained by
the general assemblage procedure. Since the stiffness matrix is tri-diagonal
for the present model, the assemblage damping matrix will thus be a tri-
diagonal matrix. It should be emphasized that neither Eq. 20 nor Eq. 21 are
usual relationships for expressing material damping in geotechnical prob-
lems; most investigators prefer to use the Rayleigh damping (proportional
damping) expression, which depends on the natural frequency of the model.
However, the finite element model presented in this study does not have a
natural frequency because the energy absorbing boundary can be placed at
any distance from the pile and actually makes the system infinitely large.
Therefore, Eq. 21, which depends on the exciting frequency, is employed
in this study.
Energy Absorbing Boundary
In finite element analysis, it is necessary to introduce a well-defined boundary
such that the model should be supported and the relevant matrices should
be nonsingular. However, for the problem that deals with wave propagation,
a fixed boundary is not appropriate, because wave energy will bounce back
from the boundary. Kuhlemeyer (1979) presented an elastic shear wave en-
ergy-absorbing boundary that accounts for the shear wave energy transmitted
through the boundary at any radius r. The boundary is defined through the
expression
pV, (22)
H?{a0)\
in which jzr = shear stress at boundary; p = mass density of boundary ma-
terial; Vs = shear wave velocity of boundary material; a„ = frequency ratio,
oyr/Vs; //o2)(a„), Hf\a0) = Hankel functions of second kind of zero order
and first order, respectively; / = imaginary unit; and a = velocity at bound-
ary.
Eq. 22 shows that the shear force at the boundary for steady state vibration
is a complex number. However, this force can be separated as a spring force
and a damping force which can then be introduced into the stiffness and
damping matrices in the equation of motion. In other words, the shear wave
absorber is actually a spring and a dashpot being added to the boundary at
a distance r from the pile center. The detailed method of force separation
is well known and is presented in detail by Wu (1985).
Dynamic Elasto-Plastic Analysis
The basic concept of elasto-plastic analysis and computational procedures
of the direct integration method are well known and are described in detail
by Wu (1985); a brief outline of the method is provided herein.
The Houbolt method, which is a step-by-step direct-integration method,
1292
J. Geotech. Engrg. 1989.115:1285-1302.
-3 G
p
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
FIG. 4. Bilinear Model under Periodic Loading
was employed for numerical integration of the equations of motion. The
dynamic elasto-plastic soil behavior is described by a bilinear curve, as pro-
posed by Thiers and Seed (1968). In Fig. 4, the soil initially deforms ac-
cording to the initial shear modulus G, until the element stress attains a yield
limit Ty, which designates the starting point of yielding. By further increasing
the loading, the material is characterized by a plastic deformation. At this
stage, the total change of strain Ay, is the sum of the elastic strain increment
A7,, and the plastic strain increment A7,,. The soil can deform plastically until
an unloading situation is encountered. When the change of unloading strain
develops to two times the initial strain yy, the soil will deform plastically
again. It must be emphasized that Fig. 4 represents an elastic, linear strain-
hardening soil behavior. For the soil with elastic, perfectly plastic behavior,
the plastic slope Gp is assigned to be a small value or zero in the analysis
performed at discrete time intervals. The element stress increment Atp is
initially assumed to be linear elastic. When the element has yielded and
plastic deformation is encountered, a correction must be made to reduce the
element stress to satisfy the yield condition. The reduction process can be
carried out by converting the modified element stresses to an equivalent nodal
force vector. Then, the total of this force vector with the inertia force vector
and damping force vector is compared to the applied force vector of that
time interval. If the resultant, also known as the residual force vector, is
large, the residual force must be applied to the system until dynamic equi-
librium is maintained. In other words, an iterative procedure is performed
in order that the solution converges to a tolerable limit in each time step.
However, the rate of convergence of this procedure can be very slow if either
or both the plastic slope Gp or the tolerance are very small. A large number
of iterations will be required in each time step such that the computational
procedure will be very expensive. In order to avoid an excessively large
iterative procedure, Aitken's acceleration method (Aitken 1937; Boyle and
Jennings 1973) was employed to solve the problem.
A FORTRAN computer program based upon the aforementioned theory
was developed on the CDC Cyber 175 computer and is available (Wu 1985).
The general initial intent of developing the program was to perform finite
element analyses for the same elasto-plastic soil as is assumed in the Smith
1293
J. Geotech. Engrg. 1989.115:1285-1302.
model and to compare solutions. Extensive studies were conducted in an
attempt to back-calculate the Smith model parameters; these studies are sum-
marized herein.
CALCULATING SMITH'S PARAMETERS
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
A small computer program was written for the Smith one-degree-of-free-
dom model in order to conduct the finite element model comparison studies.
The primary goals were to correlate: (1) The initial shear modulus and yield
strain of the elasto-plastic j-y relation (Fig. 5) used in the finite element
model; with (2) Smith's spring stiffness and soil quake (Fig. 6) used in the
wave equation model, and then to determine the Smith model damping pa-
rameter / ' for the pile shaft-soil resistance. The general approach was to
determine Smith's parameters such that the pile response curve using Smith's
model agrees with that obtained from the finite element model. The approach
chosen was accomplished in two steps: (1) Establish the Smith model spring
stiffness, K, with no soil material damping; and (2) calculate the pile shaft
damping parameter, J1, with a strain-dependent soil material damping as-
sumed in the finite element model. This approach means that J' is strictly
related to soil material damping; J' was calculated by assuming that the
damping force is proportional to pile velocity, as is assumed in the wave
equation method. The results are presented later.
Spring Stiffness and Soil Quake
The task of determining the spring stiffness, Ru/Q, appears at first glance
to be an easy one—simply use the elastic static force-deflection relationship
for the finite element model of the pile shaft-soil system. However, the ac-
tual problem involves wave propagation and Smith's model does not include
the real effects of soil inertia. The complexity also increases over that of
the elastic case as a result of plastic soil strains. Studies were completed
based upon use of this simple finite element static stiffness (far field bound-
ary fixed), which is proportional to shear modulus. The elasto-plastic soil
yield limit was based upon the soil shear strength, C„. Hence, both spring
stiffness and soil quake are easily calculated for any desired ratios of G/Cu.
The subsequent pile driving results showed a significant inconsistency, how-
ever. Namely, the finite element interface (slip) element and the Smith model
spring do not yield at the same applied load level even though the Smith
model spring is defined to yield at a quake value that corresponds to a force
equal to the product of soil shear strength and shaft area, which is consistent
DEFORMATION
FIG. 5. Stress-Strain Relation in Fi- FIG, 6. Load-Deformation Relation in
nite Element Analysis Wave Equation Analysis
1294
J. Geotech. Engrg. 1989.115:1285-1302.
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
FIG. 7. KdyJGH versus G
with the yield stress in the finite element slip element. (Note that in wave
equation practice, a rather arbitrary value of the soil quake is assumed and
the total ultimate pile resistance is rather arbitrarily divided into shaft and
toe resistance, where the total resistance is obtained from a static load test.)
Hence, it was concluded that the Smith model soil spring stiffness and quake
values must partially include dynamic effects.
In order to determine the spring stiffness that includes some of the dy-
namic effects, a dynamic finite element analysis was completed with zero
soil damping (the damping would be included later). In reality, a pile driving
force pulse has a very large magnitude but very short duration. To incor-
porate this force pulse into the direct integration solution, the force pulse
was approximated by an equivalent triangular function symmetrical about an
axis through the peak. Since the formulation of the energy-absorbing bound-
ary is based on a steady-state solution, the applied loading must be sinu-
soidal. Fourier series were employed to resolve the equivalent triangular
function into a set of harmonic functions. However, it was noted that only
the odd-term harmonic functions contributed to the summation of the series
and the amplitude of the first harmonic function was nine times that of the
third harmonic function; therefore, the hammer force pulse was approxi-
mated closely by the first harmonic of a symmetrical triangular function.
The duration (end of the triangular function) was assumed to be in the range
of 0.01 to 0.03 s. The correlation of the finite element model with the Smith
model was performed in two steps.
1. Find the pile response from the dynamic finite element analysis.
2. Carry out an analysis with the Smith model by adjusting the spring stiffness
until the first pile displacement peak is similar to that given in step 1. The ob-
tained spring stiffness is referred to as the dynamic spring stiffness Kdyn.
Results obtained in the correlation show that the dynamic spring stiffness
values depend on the shear modulus G, model thickness H, pile radius r0
(r„ between 0.15 and 0.2 m), and force pulse duration. Fig. 7 shows the
variation of the ratio Kdyn/GH with the shear modulus at the different pulse
durations and pile radii.
The correlation of the yield limits is based on two assumptions.
1295
J. Geotech. Engrg. 1989.115:1285-1302.
1. When the stress of the interface element in the finite element model is equal
to, or exceeds, the shear strength of the soil, slippage occurs.
2. The soil spring in the Smith model reaches its ultimate resistance /?„ when
the interface element in the finite element model begins to slip. The first as-
sumption states that the interface element has the same yield limit as that of the
soil material, while the second assumption defines where the plastic deformations
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
begin in the two analyses. Referring to Figs. 5 and 6, the correlation can be
done by equating the ultimate resistance Ru of the Smith model with the cor-
responding shear force induced at the pile-soil interface in the finite element
model at the instant when the interface element begins to slip. This shear force
is calculated as the product of the shear strength Cu and the shear area A of the
pile
Ru = KdynQ = C„A : (23)
and Q can be expressed as
2Cuirr„H
Q = — (24)
Smith Damping Parameter
The procedure to determine the damping parameter J' consists of the fol-
lowing.
1. Find the pile displacement from the finite element analysis by including
both material and radiation damping.
2. From Fig. 7, choose a spring stiffness that corresponds to the shear mod-
ulus G used in step 1.
3. Use Eq. 24 to calculate the soil quake.
4. Use the information obtained from steps 2 and 3, and carry out analyses
on the Smith model by adjusting the damping parameter J' until the first pile
displacement peak is similar to that given in step 1. (In conventional analysis,
the final displacement, or set, will be of more interest. However, the modified
Smith's equation, Eq. 4, is not generally valid when the pile displacement passes
the first peak and displaces with a negative penetration velocity. Therefore, for
a consistent comparison, the first pile displacement peak was chosen as the cri-
terion.) The obtained J' represents the damping value for the soil type used in
the analysis.
This method uses the finite element results to evaluate the soil damping
values of the Smith model (i.e., the damping parameter in wave equation
analysis). Step 1 involves calculating the pile displacement from the finite
element analysis by taking into account material and radiation damping. Steps
2 and 3 determine the required stiffness parameters for the analysis using
the Smith model (these parameters do not involve the damping effect). Step
4 is a reasonable method of introducing the damping effect into the analysis
(the first displacement peak obtained from the analysis matches with that
from the finite element analysis).
RESULTS
To illustrate the use of the present method in damping determination, sev-
eral cases were analyzed. The soil used in the analyses was based on a G/
1296
J. Geotech. Engrg. 1989.115:1285-1302.
1.5 -r-
'. P/P y (a)
x 1 . Si)
i 1.65
1 -0 - I c = 20kPa o J.80
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
(c)
C = 200kPa
.. . " I
°'0 1 ' . . . I I I I'I I I l'l I I I 1° =t~r-
0 1 2 3 4 5
VELOCITY U/s)
FIG. 8. J' versus Pile Velocity: (a) G = 10 MPa; (b) G = 40 MPa; (c) G = 100
MPa (Using Smith's Equation)
C„ value assumed to be in a range of 100 to 500. The typical shear strength
C„ was defined to be from 20 kPa for soft clay to 200 kPa for hard clay.
In order to present the results consistently, the loading is defined by the ratio,
of applied loading P to yield loading Py, in which the yield loading is the
product of the shear strength C„ and the pile shear area; results presented
are for P/Py > 1.0.
Variation of Damping Parameter with Pile Velocity
Results from the analyses show that the velocity of pile penetration in-
creases as the loading ratio, P/Py, increases. In order to perform the analysis
over a reasonable range of pile penetration velocity, the loading ratio is lim-
ited to not more than 2.5.
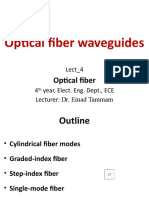
The damping parameter J' of the soil with shear modulus 10, 40, and 100
MPa are plotted versus the pile velocity as shown in Figs. 8(a), 8(b), and
8(c), respectively. The pile radius and model thickness used in this analysis
was 0.2 m, and the applied force pulse duration was equal to 0.02 s. The
damping parameters were obtained by using Smith's equation (Eq. 3). In
Figs. 8(a) and 8(b), three shear strength values chosen from the typical range
defined previously were considered, while in Fig. 8(c) only a shear strength
of 200 kPa was used because this was the only value that fell within the
defined range. The P/Py values used in these analyses were chosen between
1.5 and 2 . 1 .
The results illustrate a number of important points, as follows.
1. The damping parameter J' is not a constant but varies with the pile pen-
etration velocity. The damping parameter decreases as the pile velocity increases.
The general shape of these curves agrees quite well with what was found in
some references (Cayle and Gibson 1970; Coyle et al. 1972; Litkouhi and Poskitt
1980).
1297
J. Geotech. Engrg. 1989.115:1285-1302.
2.2 - -
2.0 -
if 1.8-
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
1.6 -
0.24 0.28 0.32 0.36 0.40 0.44
YIELDING ZONE RADIUS (m)
FIG. 9. p/py versus Yielding Zone Radius for G = 100 MPa, c„ = 200 kPa
2. For a given shear modulus, the damping parameter varies in a lower range
as the shear strength increases. That means that for a given shear modulus, the
damping parameter decreases with increasing soil shear strength.
3. For soils with the same shear strength, the one with the lower shear mod-
ulus is slightly more sensitive to damping.
Variation of Yielding Zone Radius with P/Py
When a pile is driven, the soil in the vicinity of the pile surface will yield
and deform plastically at a high load level. To obtain a curve showing the
variation of the yielding zone radius with P/Py, a fine mesh should be used
adjacent to the pile such that any change of element stress can be detected.
Fig. 9 shows a curve of yielding zone radius versus P/Py for G = 100 MPa
with C„ = 200 kPa. Results from a number of cases indicate that if P/Py is
less than 2.5, the yielding zone radius will not exceed 1.5 pile diameters.
That is, soil failure adjacent to the pile shaft due to shaft movement during
pile driving is limited to a small area around the pile, which is a most im-
portant observation.
Variation of Damping Parameter with Force Pulse Duration
As mentioned previously, the duration of an actual force pulse is estimated
to be in a range 0.01 to 0.03 s and the variation of J' with this range of
durations is of interest. The analyses were performed by varying the force
pulse duration but using the same amplitude of applied loading. Fig. 10
1 .2 -i 1
0.8 -
~> 0.4 -
°-° I MT-| I I i
0.008 0.012 0.016 0.020 0.024 0-028 0.032
DURATION (s)
FIG. 10. J' versus Duration for G = 40 MPa, C„ = 150 kPa, P/Py = 1.6
1298
J. Geotech. Engrg. 1989.115:1285-1302.
shows a typical relation of damping parameter with force pulse P/Py = 1.6,
G = 40 MPa, and C„ = 1 5 0 kPa. The curve shows that the damping pa-
rameter is not constant over the range of duration considered; that is, when
the duration increases, the damping parameter decreases. This result occurs
because the damping parameter decreases as the pile velocity increases (i.e.,
as the applied loading increases). When the duration increases, the loading
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
is applied to the system for a longer period of time and, thus, the total
loading increases. As a result, increasing the duration decreases the value
of damping parameter.
The curve also shows that the damping parameter varies in a least extent
between 0.02 to 0.03 s, because rate of change of duration is higher when
the duration is in the lower range of value. Therefore, the damping parameter
is found to vary more between the durations 0.01 and 0.02 s.
Modified Smith's Equation
To achieve a constant damping parameter for wave equation analysis, a
number of researchers (Coyle and Gibson 1970; Coyle et al. 1972; Litkouhi
and Poskitt 1980) have proposed to modify Smith's original equation by
raising the pile velocity to the power N (Eq. 4). The purpose of this section
is to study the validity of the modified equation. The one-degree-of-freedom
computer program was modified so that the damping parameter J' can be
obtained using the modified equation. During the modification, two diffi-
culties were encountered.
1. The one-degree-of-freedom computer program uses a numerical technique
to solve the equation of motion as shown in Eq. 19, which is a linear differential
equation. When the velocity (i.e., elements in the velocity vector {a} in Eq. 19)
is raised to power N, the equation of motion will no longer be linear. To over-
come this difficulty, modification should be made simply by multiplying the
damping term (i.e., the elements in the damping matrix [C] in Eq. 19) by VN~l.
This method introduces the modification to the damping term but keeps the ve-
locity the same.
_C„ - 20kPa (a)
. 60kPa
o. i
o. i
140kPa
200kPa
0.0
0. 1
Cu = 200kPa (c)
1 „ .
I ' ' ' ' I ' ' ' ' I ' '"
1 2 3
VELOCITr (m/a)
FIG. 11. J' versus pile velocity: (a) G = 10 MPa; (b) G = 40 MPa; (c) G = 100
MPa (Using Smith's Modified Equation)
1299
J. Geotech. Engrg. 1989.115:1285-1302.
2. As can be noted from the modified Smith's equation (Eq. 4), the equation
is not, in general, mathematically valid for negative velocities.
The analyses were carried out (using the aforementioned data) by raising
the velocity to power 0.18, which was suggested to be an acceptable A' value
for clay soil (Coyle and Gibson 1970; Litkouhi and Poskitt 1980). Figs.
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
11 (a)-(c) show the variation of the damping parameter with pile penetration
velocity. In Figs. 11(b) and 11(c), the damping parameter is found to be
reasonably constant, while in Fig. 11(a), the damping parameter varies over
the range of pile velocity. These results reveal that the modified Smith's
equation reduces the variation of the damping parameter to a smaller range.
For soil with higher shear modulus, the damping parameter obtained by the
modified Smith's equation is reasonably constant. However, for soil with
low shear modulus, the damping parameter still varies with the pile pene-
tration velocity.
CONCLUSION
Smith developed a wave equation by idealizing the pile-soil system as a
series of masses and springs. The soil medium in the system was modeled
by a soil spring and sliding friction block (elastic, perfectly plastic soil) in
series connected in parallel to a dashpot. The finite element method was
used herein to back-calculate Smith's shaft friction damping parameter. The
soil spring was correlated to the soil shear modulus by a dynamic approach
and the hammer force pulse was approximated by the first harmonic function
of the Fourier series for a triangular function. The results from the analyses
led to the following observations.
1. The damping parameter, J', in Smith's original equation varies with both
the pile velocity and the force pulse duration.
2. The damping effect is less significant for soil with high shear modulus.
3. For soils with the same shear strength, damping is more significant for the
one with lower shear modulus.
4. The radius of the soil yielding zone due to shaft movement during pile
driving is less than about 1.5 pile diameters.
5. The damping parameter determined from the modified Smith's equation is
constant only for soil with high shear modulus.
In general, it does not appear to be possible to determine a unique J' value
for a given soil using the Smith model, and therefore, a better model is
needed. A simplified pile shaft-soil model, which predicts more accurate pile
displacements than does the Smith model, has been proposed (Wu 1985).
ACKNOWLEDGMENTS
The writers are thankful to the University of Calgary for providing the
computing facilities as well as financial assistance to the first writer.
APPENDIX I. REFERENCES
Aitken, A. C. (1937). "The evaluation of the latent roots and latent vectors of a
matrix." Proc, Royal Soc. of Edinburgh, 57, Edinburgh, U.K., 269-304.
1300
J. Geotech. Engrg. 1989.115:1285-1302.
Boyle, E., and Jennings, A. (1973). "Accelerating the convergence of elastic-plastic
stress analysis." Int. J. Numerical Methods, 7, 232-235.
Coyle, H. M., and Gibson, G. C. (1970). "Empirical damping constants for sands
and clays." J. Soil Mech. and Found. Div., ASCE, 96(3), 949-965.
Coyle, H. M., Bartoskewitz, R. E., and Korb, K. W. (1972). "Soil resistance pa-
rameters for wave equation analysis." J. Materials, 7, 486-495.
Heuze, F. E., and Barbour, T. G. (1982). "New models for rock joints and inter-
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
faces." J. Geotech. Engrg. Div., ASCE, 108(5), 757-776.
Hirsch, T. J., et al. (1970). "Pile-driving analysis by one-dimensional wave theory:
State of the art." Highway Res. Record, 333, 35-54.
Isaacs, D. V. (1931). "Reinforced concrete pile formulae." Transactions, Inst, of
Engrs., Australia, 12, 312.
Kim, T. C , and Novak, M. (1981). "Dynamic properties of some cohesive soils of
Ontario." Canadian Geotech. J., 18(3), 371-389.
Kuhlemeyer, R. L. (1979). "Vertical vibration of piles." J. Geotech. Engrg., ASCE,
105(2), 273-287.
Litkouhi, S., and Poskitt, T. J. (1980). "Damping constants for pile driveability
calculations." Geotechnique, 30(1), 77-86.
Novak, M. (1977). "Vertical vibration of floating piles." J. Engrg. Mech., ASCE,
103(1), 153-168.
Seed, H. B., and Idriss, I. M. (1970). "Soil moduli and damping factors for dynamic
response analysis." Report No. EERC 70-10, Earthquake Engrg. Res. Center, Univ.
of California, Berkeley, Calif.
Smith, E. A. L. (1960). "Pile-driving analysis by the wave equation." J. Soil Mech.
and Found. Div., ASCE, 86(4), 35-61.
Thiers, G. R., and Seed, H. B. (1968). "Cyclic stress-strain characteristics of clay."
J. Soil Mech. and Found. Div., ASCE, 94(2), 555-569.
Wu, K. H. (1985). "Pile shaft-soil model for wave equation analysis: Verification
by dynamic finite element approach." Thesis presented to the University of Cal-
gary, at Alberta, Canada, in partial fulfillment of the requirements for the degree
of Master of Science in Engineering.
APPENDIX II. NOTATION
The following symbols are used in this paper:
a„ = frequency ratio;
A = shear area;
{«'},{«},{a} = acceleration, velocity, and displacement vectors;
bub2,bi,bi = unknown coefficients;
[B] = strain-displacement transformation matrix;
C„ = soil shear strength;
[C] = system damping matrix;
[c] = element damping matrix;
D = total soil displacement from original position;
D' = total plastic deformation;
[D] = elasticity matrix;
G = shear modulus;
Gp = plastic slope;
H = model thickness;
//o 2) ,// ( i 2) = Hankel function of second kind of zero order and first or-
der;
/ = imaginary unit;
J, J' = damping parameters for pile toe and pile shaft;
K = spring stiffness in Smith's model;
1301
J. Geotech. Engrg. 1989.115:1285-1302.
Ks = interface shear stiffness;
IK) = system stiffness matrix;
[k] = element stiffness matrix;
[M] = system mass matrix;
[m] = element mass matrix;
N = modification factor in Smith's equation;
Downloaded from ascelibrary.org by University Of Ulster AT on 06/01/15. Copyright ASCE. For personal use only; all rights reserved.
[N] = shape function matrix;
P = total loading;
p = dynamic resistance of soil;
1
Pdyn = static resistance of soil;
1
sta
Py = yield loading;
Q = soil quake;
R = element width;
R„ = ultimate resistance;
r = radial distance from coordinate origin;
r„ = pile radius;
f = r-coordinate of the interface centroid;
t' = interface element thickness;
V = velocity of pile in Smith's equation;
= shear wave velocity of boundary material;
vws = displacement field;
MX = element displacement field vector;
= displacement amplitude;
z = vertical distance from coordinate origin;
1t,le,lp = total, elastic, and plastic strains;
A = prescript indicating quantity change;
= damping ratio;
4 = mass density of boundary material;
P
T
P = stress in plastic range;
T
y = yield limit;
Tzr = shear stress at boundary;
CO = exciting frequency;
{€} = element strain vector; and
{<T} = element stress vector.
1302
J. Geotech. Engrg. 1989.115:1285-1302.
You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5819)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1093)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (845)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (590)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (540)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (348)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (822)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Project On Ac Voltage Controller Using TriacDocument33 pagesProject On Ac Voltage Controller Using Triackatul830486% (7)
- Shot Term Training Programme On Industrial InstrumentationDocument42 pagesShot Term Training Programme On Industrial Instrumentationkhanjamil1267% (3)
- H2 Chapter 15 Complex Number 1 Tutorial Student Copy 2023Document3 pagesH2 Chapter 15 Complex Number 1 Tutorial Student Copy 2023JiahengNo ratings yet
- 3 - Proportional Pressure Reducing ValveDocument8 pages3 - Proportional Pressure Reducing ValveAdel AshrafNo ratings yet
- 244ENG AC2speed UML51R Set PDFDocument6 pages244ENG AC2speed UML51R Set PDFSinuhe LopezNo ratings yet
- Observation Requirement, Booking & Calculation Process/Procedure For Optical LevelDocument26 pagesObservation Requirement, Booking & Calculation Process/Procedure For Optical LevelHidayah HafizNo ratings yet
- Injection Moulding of Elastomer SDocument21 pagesInjection Moulding of Elastomer SM J VoraNo ratings yet
- Giuseppe Massobrio, Paolo Antognetti - Semiconductor Device Modeling With SPICE-McGraw-Hill (1993)Document483 pagesGiuseppe Massobrio, Paolo Antognetti - Semiconductor Device Modeling With SPICE-McGraw-Hill (1993)Eduardo RodriguesNo ratings yet
- Equilibrium & TypesDocument10 pagesEquilibrium & TypesRahulNo ratings yet
- Spectroscopy Multiple Choice Questions PDF NotesDocument33 pagesSpectroscopy Multiple Choice Questions PDF NotesHassaanNo ratings yet
- Pelton2014 Para-Equilibrium Phase DiagramsDocument7 pagesPelton2014 Para-Equilibrium Phase DiagramsAbraham Becerra AranedaNo ratings yet
- Impact of Sour Composition On Ignition Delay, Burning VelocityDocument9 pagesImpact of Sour Composition On Ignition Delay, Burning Velocitydallyn100% (1)
- Analog Electronics Module-2Document15 pagesAnalog Electronics Module-2Sourabh HalagekarNo ratings yet
- Chap17 SDocument90 pagesChap17 STest GgNo ratings yet
- Een 5Document3 pagesEen 5Arif ShishirNo ratings yet
- 8.3 Tangents From External Point 6Document6 pages8.3 Tangents From External Point 6Hin Wa LeungNo ratings yet
- Lect 4Document28 pagesLect 4george samyNo ratings yet
- 2.u#1 11KV Switchgear Testing Book-2 PDFDocument219 pages2.u#1 11KV Switchgear Testing Book-2 PDFSabyasachi PatraNo ratings yet
- Report Grp3 3Document29 pagesReport Grp3 3uday kumarNo ratings yet
- Freezing Point of Aqueous Engine Coolants: Standard Test Method ForDocument3 pagesFreezing Point of Aqueous Engine Coolants: Standard Test Method ForMaxNo ratings yet
- Gessler Led Spot lg6 EnglishDocument6 pagesGessler Led Spot lg6 EnglishPharaoh GloriesNo ratings yet
- Optimized RF Board Layout For STM32WL Series: Application NoteDocument49 pagesOptimized RF Board Layout For STM32WL Series: Application NoteAndy NGNo ratings yet
- LESSON 3 - ManometerDocument7 pagesLESSON 3 - ManometerPamela MendozaNo ratings yet
- Review Sheet For Quantum MechanicsDocument5 pagesReview Sheet For Quantum MechanicsAditya RoutNo ratings yet
- Electrical Actuation SystemDocument8 pagesElectrical Actuation SystemShriyash KamatNo ratings yet
- Petdq-Pexju Rev0Document3 pagesPetdq-Pexju Rev0jbarbosaNo ratings yet
- Light 2022Document31 pagesLight 2022daley dailyNo ratings yet
- NOC EnergystarX402C X502CDocument1 pageNOC EnergystarX402C X502CDiossane AssaneNo ratings yet
- Aerodynamic DragDocument23 pagesAerodynamic DragSunil JogdandNo ratings yet
- Adb Acp 1000Document2 pagesAdb Acp 1000vietpuntocomNo ratings yet