You might also like
- Ddec6 PDFDocument561 pagesDdec6 PDFSelvin Escobar Rojas100% (1)
- KTM 125 LC2 Engine Repair ManualDocument45 pagesKTM 125 LC2 Engine Repair ManualMihai Paulescu67% (3)
- Panasonic Service Manual g80Document119 pagesPanasonic Service Manual g80Vojtěch ProcházkaNo ratings yet
- Siemens Simodrive 611 Universal DigitalDocument452 pagesSiemens Simodrive 611 Universal Digitalchnandu67% (3)
- Design of Charge Pump PLLDocument5 pagesDesign of Charge Pump PLLSwati KashtNo ratings yet
- Eppendorf 5804R Centrifuge ManualDocument42 pagesEppendorf 5804R Centrifuge ManualUma Mahesh100% (1)
- PLC Toggle Logic & Flip Flops - Ladder Logic World PDFDocument20 pagesPLC Toggle Logic & Flip Flops - Ladder Logic World PDFmrbssNo ratings yet
- DM435Document12 pagesDM435Wellington SantanaNo ratings yet
- MM432Document40 pagesMM432Wellington SantanaNo ratings yet
- Digital Input - OutputP10 DIODocument1 pageDigital Input - OutputP10 DIOClub Bal de TenaNo ratings yet
- Digital Output Module DO435: Model Number Short Description ImageDocument10 pagesDigital Output Module DO435: Model Number Short Description ImagekenNo ratings yet
- LA4620Document8 pagesLA4620Agung SupranotoNo ratings yet
- Transistor HVT 24m12aDocument14 pagesTransistor HVT 24m12anuwari fadliNo ratings yet
- Amp Classe Ab 2W - Tda7052Document5 pagesAmp Classe Ab 2W - Tda7052Rodrigo BonfanteNo ratings yet
- SEMIKRON DataSheet SKHI 22A R L5071601Document2 pagesSEMIKRON DataSheet SKHI 22A R L5071601Syed Khawar MukhtarNo ratings yet
- CJ1W-ID231 DC Input Unit (Fujitsu Connector, 32 Points) : Specifications of Basic I/O UnitsDocument2 pagesCJ1W-ID231 DC Input Unit (Fujitsu Connector, 32 Points) : Specifications of Basic I/O UnitsSerkanAlNo ratings yet
- Ilc151 PTDocument9 pagesIlc151 PTGabriel PiccoliNo ratings yet
- 3107-SIP13H: SANYO Electric Co.,Ltd. Semiconductor Bussiness HeadquartersDocument20 pages3107-SIP13H: SANYO Electric Co.,Ltd. Semiconductor Bussiness HeadquartersJose BenavidesNo ratings yet
- QP12W08S 37Document4 pagesQP12W08S 37oscarNo ratings yet
- Hex Non-Inverted Buffers With Open-Collector Outputs: IN74LS07Document3 pagesHex Non-Inverted Buffers With Open-Collector Outputs: IN74LS07ДенисNo ratings yet
- Enviando Por Email 5 UNIVERSAL Traction SwitchDocument2 pagesEnviando Por Email 5 UNIVERSAL Traction SwitchAdam SchwemleinNo ratings yet
- TC4420M/TC4429M: 6A High-Speed MOSFET DriversDocument18 pagesTC4420M/TC4429M: 6A High-Speed MOSFET Driversdaniela espinosaNo ratings yet
- FM62429 Serial Data Control Dual Electronic Volume: SpecificationDocument10 pagesFM62429 Serial Data Control Dual Electronic Volume: Specificationfabio_sgNo ratings yet
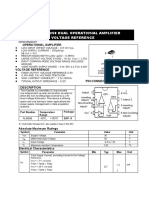
- Features Output Current: 1A High Output Voltage Precision: 1 High Input Voltage: 35VDocument5 pagesFeatures Output Current: 1A High Output Voltage Precision: 1 High Input Voltage: 35VDaniela GarciaNo ratings yet
- 7 Di 13570Document19 pages7 Di 13570chzakiabbas5250No ratings yet
- 6.0 W AF Power Amplifier For Home Stereo, TV Use: 3075-SIP7HDocument4 pages6.0 W AF Power Amplifier For Home Stereo, TV Use: 3075-SIP7HVictor LabranqueNo ratings yet
- X20do9322 EngDocument8 pagesX20do9322 Engbarbisan.fabioNo ratings yet
- 28 Channel Ink Jet Driver: Multipower BCD TechnologyDocument9 pages28 Channel Ink Jet Driver: Multipower BCD TechnologyVictor JhonNo ratings yet
- Datasheet CFB800 SeriesDocument5 pagesDatasheet CFB800 Seriesajay.kumaranNo ratings yet
- 1 General Information: Model Number Short Description Analog InputsDocument32 pages1 General Information: Model Number Short Description Analog InputsOscar Enríquez MorenoNo ratings yet
- EE-SX461-P11: Photomicrosensor (Transmissive)Document106 pagesEE-SX461-P11: Photomicrosensor (Transmissive)Daniel NicholasNo ratings yet
- Epsitron - Capacitive Buffer Modules: DescriptionDocument1 pageEpsitron - Capacitive Buffer Modules: DescriptionHector bonillaNo ratings yet
- Package Dimensions: Power Brushless Motor Predriver IC For OA ApplicationsDocument12 pagesPackage Dimensions: Power Brushless Motor Predriver IC For OA ApplicationsHojas VientoNo ratings yet
- Siemens VSD Control UnitDocument1 pageSiemens VSD Control UnitnitinrajuNo ratings yet
- TDA7379-ST Microelectronics PDFDocument7 pagesTDA7379-ST Microelectronics PDFElmer Leodan Rojas CachayNo ratings yet
- CD522Document17 pagesCD522davsanabbNo ratings yet
- Monolithic IC MM1326, 1354, 1369: Q Xpander ProcessorsDocument10 pagesMonolithic IC MM1326, 1354, 1369: Q Xpander ProcessorsrolandseNo ratings yet
- 4-Channel BTL Power Amplifier For Car Audio Systems: Monolithic Linear ICDocument11 pages4-Channel BTL Power Amplifier For Car Audio Systems: Monolithic Linear ICEdinaldo GuimaraesNo ratings yet
- Single-Phase Full-Wave Fan Motor Driver: Monolithic Digital ICDocument7 pagesSingle-Phase Full-Wave Fan Motor Driver: Monolithic Digital ICArif PurNo ratings yet
- The RF Line: Semiconductor Technical DataDocument5 pagesThe RF Line: Semiconductor Technical Datajolupeco44No ratings yet
- FLM358 FCI - AlldatasheetDocument7 pagesFLM358 FCI - AlldatasheetRobson SoaresNo ratings yet
- 6SL3243 0BB30 1ha3Document1 page6SL3243 0BB30 1ha3Banupriya BalasubramanianNo ratings yet
- GS324-Low Power QUAD Operational AmplifiersDocument9 pagesGS324-Low Power QUAD Operational AmplifiersFlaviano Costa SilvaNo ratings yet
- Em221 PDFDocument2 pagesEm221 PDFAbdul KurniadiNo ratings yet
- 3031A-SIP-5H: SANYO Electric Co.,Ltd. Semiconductor Bussiness HeadquartersDocument8 pages3031A-SIP-5H: SANYO Electric Co.,Ltd. Semiconductor Bussiness HeadquartersHamza AbbasiNo ratings yet
- Phoenix Contact 2865007 enDocument15 pagesPhoenix Contact 2865007 enDuro Sto LavorandoNo ratings yet
- Low Noise Dual Operational Amplifiers: (Plastic Package)Document5 pagesLow Noise Dual Operational Amplifiers: (Plastic Package)Liver Haro OrellanesNo ratings yet
- 3001B-DIP8: SANYO Electric Co.,Ltd. Semiconductor Bussiness HeadquartersDocument4 pages3001B-DIP8: SANYO Electric Co.,Ltd. Semiconductor Bussiness HeadquartersManuel MartinezNo ratings yet
- Intelidrive Lite FPC DatasheetDocument4 pagesIntelidrive Lite FPC DatasheetEduardo A PaduanNo ratings yet
- MM74C925 - MM74C926 4-Digit Counters With Multiplexed 7-Segment Output DriversDocument8 pagesMM74C925 - MM74C926 4-Digit Counters With Multiplexed 7-Segment Output Driversmasoudamante100% (2)
- PG2455 00 - en GBDocument4 pagesPG2455 00 - en GBsoultrader2019No ratings yet
- Datasheet Dec BCD-7seg PDFDocument8 pagesDatasheet Dec BCD-7seg PDFVictoria LiraNo ratings yet
- Monolithic IC MM1375: RGB Video Amplifier For MonitorsDocument6 pagesMonolithic IC MM1375: RGB Video Amplifier For MonitorsAbel RodriguezNo ratings yet
- Data Sheet For SINAMICS Control Unit CU230P-2 HVAC: Ambient Conditions Electrical DataDocument1 pageData Sheet For SINAMICS Control Unit CU230P-2 HVAC: Ambient Conditions Electrical DataRyan TorresNo ratings yet
- TSM102/A: Voltage and Current ControllerDocument10 pagesTSM102/A: Voltage and Current ControllerFranky FernandezNo ratings yet
- AEG DC 2000 Mat 37204601Document2 pagesAEG DC 2000 Mat 37204601mauriceauNo ratings yet
- 1SC2060PDocument11 pages1SC2060PGago YesaeanNo ratings yet
- Voltage Regulator Upc24a05 24a05 Nec DatasheetDocument12 pagesVoltage Regulator Upc24a05 24a05 Nec Datasheetalphons3No ratings yet
- Twido Twdlmda20drt Manual EspañolDocument10 pagesTwido Twdlmda20drt Manual Españoljoel_garcia_leeNo ratings yet
- TSM101/A: Voltage and Current ControllerDocument13 pagesTSM101/A: Voltage and Current ControllerRaka Satria PradanaNo ratings yet
- Ec48324 FV PDFDocument11 pagesEc48324 FV PDFАлександрNo ratings yet
- 6SL3243 0BB30 1PA3 Datasheet enDocument1 page6SL3243 0BB30 1PA3 Datasheet enWaldo Flores PantojaNo ratings yet
- Data Sheet For SINAMICS G120 Control Unit CU230P-2 DP: Ambient Conditions Electrical DataDocument1 pageData Sheet For SINAMICS G120 Control Unit CU230P-2 DP: Ambient Conditions Electrical DataWaldo Flores PantojaNo ratings yet
- Z170REG DatasheetDocument1 pageZ170REG DatasheetAutomation WorksNo ratings yet
- X20do9322-Eng V3.15Document8 pagesX20do9322-Eng V3.15dhiyaulhaq05071991No ratings yet
- NTZ 238252Document3 pagesNTZ 238252sergioNo ratings yet
- 5th Grade English Activity 1 PDFDocument4 pages5th Grade English Activity 1 PDFsergioNo ratings yet
- Trabajo de Investigación y Divulgación CientíficaDocument3 pagesTrabajo de Investigación y Divulgación CientíficasergioNo ratings yet
- Interactive Catalog Supplements Catalog PdfsDocument3 pagesInteractive Catalog Supplements Catalog PdfssergioNo ratings yet
- Human BodyDocument55 pagesHuman BodysergioNo ratings yet
- BOD Incubator-User ManualDocument4 pagesBOD Incubator-User ManualTech LabNo ratings yet
- Type SG @su Auxiliary Relay: A Irii! P/IbuiDocument7 pagesType SG @su Auxiliary Relay: A Irii! P/IbuiImperial TranslationsNo ratings yet
- Pulse Width Modulation (PWM) : ECET 209 - Lecture 19 Introduction To MicrocontrollersDocument19 pagesPulse Width Modulation (PWM) : ECET 209 - Lecture 19 Introduction To MicrocontrollersAhmed M H Al-YousifNo ratings yet
- 30 kVA - PI144GDocument8 pages30 kVA - PI144GMaxlabNo ratings yet
- Sagm 12 135 Agm DSDocument2 pagesSagm 12 135 Agm DSJose Enrique Aparicio RuidiazNo ratings yet
- Power Your Signal: Antenna SpecificationsDocument3 pagesPower Your Signal: Antenna SpecificationsАлександрNo ratings yet
- Datasheet RAM 6116Document11 pagesDatasheet RAM 6116manokotzNo ratings yet
- Low Power Logic StyleDocument12 pagesLow Power Logic Stylergangadhar049236No ratings yet
- An Overview of The Computer System: Lecture OneDocument35 pagesAn Overview of The Computer System: Lecture OneSaabir Sheekh Muuse MoalimNo ratings yet
- BrainKart - All Department - ANNA UNIVERSITY Important Question and Answers - Regulation 2013,2017 - STUDY MATERIAL, NotesDocument25 pagesBrainKart - All Department - ANNA UNIVERSITY Important Question and Answers - Regulation 2013,2017 - STUDY MATERIAL, NotesKali Thaash100% (1)
- Display and Alarm UnitDocument2 pagesDisplay and Alarm UnitSkjhkjhkjhNo ratings yet
- Gmail - Speaking Test Venue DetailsDocument2 pagesGmail - Speaking Test Venue DetailsKeyur PatelNo ratings yet
- Multimedia Class 11 Chapter 1Document26 pagesMultimedia Class 11 Chapter 1akshatsharma007100% (1)
- BIOS UpdateDocument3 pagesBIOS Updateamirthalingam.g14017No ratings yet
- Checking of I/R Module Condition 1: No Indication On The I/R ModuleDocument16 pagesChecking of I/R Module Condition 1: No Indication On The I/R ModuleSam eagle good100% (1)
- Antenna's Lecture 4Document8 pagesAntenna's Lecture 4Hassan AhmedNo ratings yet
- D30R: 30KV High Voltage Surge/High Potential/ Resistance TesterDocument2 pagesD30R: 30KV High Voltage Surge/High Potential/ Resistance TesterkarthimeenaNo ratings yet
- FGD MAN MLP SC1100 Catalytic Bead Combustible Gas DetectorDocument34 pagesFGD MAN MLP SC1100 Catalytic Bead Combustible Gas DetectorsarkaftNo ratings yet
- Transformer Engineering - Design and PracticeDocument5 pagesTransformer Engineering - Design and Practicearpit0042No ratings yet
- B LV Switchgear PDFDocument4 pagesB LV Switchgear PDFsouheil boussaidNo ratings yet
- Temperature Control and PID: User's ManualDocument260 pagesTemperature Control and PID: User's ManuallamNo ratings yet
- Method of Statement For Testing & Commissioning UPSDocument2 pagesMethod of Statement For Testing & Commissioning UPSduong hoang tinNo ratings yet
- Optoacoplador 817aDocument9 pagesOptoacoplador 817aDario AcostaNo ratings yet