You might also like
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Group 1 Research PaperDocument127 pagesGroup 1 Research PapertaheeheeNo ratings yet
- Wendi WaDocument6 pagesWendi WaNahom FolaNo ratings yet
- Bently N 1900-65A ManualDocument200 pagesBently N 1900-65A ManualDominica Grace75% (4)
- FRT Student Guide - Tata Strive - 15112023Document4 pagesFRT Student Guide - Tata Strive - 15112023ethicalishuNo ratings yet
- Computerized Payroll System Thesis PDFDocument7 pagesComputerized Payroll System Thesis PDFn1b0lit0wum3100% (2)
- Create and Maintain Dashboards and Advanced FiltersDocument5 pagesCreate and Maintain Dashboards and Advanced FiltersShyamsundar VenkataramanNo ratings yet
- Oggetto: Limiti Ottiche SFP & XFP: Assistenza Tecnica System TestDocument2 pagesOggetto: Limiti Ottiche SFP & XFP: Assistenza Tecnica System Testroswind77No ratings yet
- Wireless Network Architecture & Operation: Unit 3Document37 pagesWireless Network Architecture & Operation: Unit 3Chandrashekar Yethagadahalli LingegowdaNo ratings yet
- LED Ring 50mm - ENDocument20 pagesLED Ring 50mm - ENtimtomtheoNo ratings yet
- Read and Write To Melexis MLX90614 Over SMBusDocument10 pagesRead and Write To Melexis MLX90614 Over SMBusCristian MurciaNo ratings yet
- AS NZS 1580.403.2-1994 Paints and Related Materials - Methods of Test - Abrasion Resistance - Taber AbraserDocument6 pagesAS NZS 1580.403.2-1994 Paints and Related Materials - Methods of Test - Abrasion Resistance - Taber AbraserThéodore LEFEVRENo ratings yet
- Chapter 4. PolymorphismDocument64 pagesChapter 4. Polymorphismsuresh.subedi.3000No ratings yet
- EMA Group 6 - Project PresentationDocument14 pagesEMA Group 6 - Project PresentationParam ShahNo ratings yet
- Datasheet - MultiPlus Inverter Charger 800VA - 5kVA - Rev 05 - EN PDFDocument2 pagesDatasheet - MultiPlus Inverter Charger 800VA - 5kVA - Rev 05 - EN PDFihsanjuNo ratings yet
- Kafka RemanereDocument3 pagesKafka RemanereRicardo BenavidesNo ratings yet
- Final Completed Virtual Assistant Alexa An Artificial IntelligenceDocument45 pagesFinal Completed Virtual Assistant Alexa An Artificial IntelligenceGayathri PrakashNo ratings yet
- Project: Order: Customer: Drawing: Date:: VVVF L1000A Oper. 220V Br200 SimplexDocument18 pagesProject: Order: Customer: Drawing: Date:: VVVF L1000A Oper. 220V Br200 SimplexMarcelo MuñozNo ratings yet
- Model Predictive Control PHD ThesisDocument7 pagesModel Predictive Control PHD ThesisWendy Belieu100% (2)
- Ofcom New Mobile Operator Guide For MNPDocument31 pagesOfcom New Mobile Operator Guide For MNPsandeep755No ratings yet
- Computer Graphics - MCQS: (C) Vertical Retrace BlankingDocument10 pagesComputer Graphics - MCQS: (C) Vertical Retrace Blankingtonykarthi17No ratings yet
- 3 Interrupts and Interrupt Service Routines: 3.1 What Is An Interrupt?Document11 pages3 Interrupts and Interrupt Service Routines: 3.1 What Is An Interrupt?Khalifa EltayebNo ratings yet
- Unit - 1 Introduction To Computer Networks and InternetDocument73 pagesUnit - 1 Introduction To Computer Networks and Internetmemonabrar8460No ratings yet
- Cheat Sheet: The Most Powerful Git ClientDocument2 pagesCheat Sheet: The Most Powerful Git ClientMomarNo ratings yet
- Resume Workshop PowerpointDocument24 pagesResume Workshop PowerpointTHIRUCHANOORU SREENATHNo ratings yet
- Blockchain TechnologyDocument10 pagesBlockchain TechnologyRould Christian Ganzon AlertaNo ratings yet
- A Multidimensional Performance Model For Consolidating Balanced ScorecardDocument11 pagesA Multidimensional Performance Model For Consolidating Balanced ScorecardTiago100% (1)
- Oracle Hospitality-IfC8-FIAS Interface Specs 2.20.24Document129 pagesOracle Hospitality-IfC8-FIAS Interface Specs 2.20.24Rania HassanNo ratings yet
- Dance Dance Revolution CorebookDocument5 pagesDance Dance Revolution CorebookMiguel Ángel TalhaNo ratings yet
- A' Level Computing Notes: ©mikey Holder, 2006Document3 pagesA' Level Computing Notes: ©mikey Holder, 2006Edzai Nyasha TarupiwaNo ratings yet
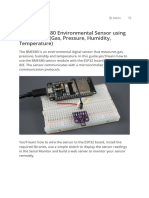
- ESP32: BME680 Environmental Sensor Using Arduino IDE (Gas, Pressure, Humidity, Temperature)Document31 pagesESP32: BME680 Environmental Sensor Using Arduino IDE (Gas, Pressure, Humidity, Temperature)Ayman AldarabieNo ratings yet