You might also like
- Iot & Industry 4.0: Strategies and Execution PerspectivesDocument30 pagesIot & Industry 4.0: Strategies and Execution PerspectivesNilson Alves de OliveiraNo ratings yet
- Intro To LV in 3 Hours For Control and Sim 8 - 5Document68 pagesIntro To LV in 3 Hours For Control and Sim 8 - 5vcortes2012No ratings yet
- Intro To LV in 3 Hours For Control and Sim 8 - 5Document68 pagesIntro To LV in 3 Hours For Control and Sim 8 - 5saheb_juNo ratings yet
- Realistic Simulation of RealTime Embedded SystemsDocument42 pagesRealistic Simulation of RealTime Embedded SystemsKhoa NguyenNo ratings yet
- Realistic Simulation of Real-Time Embedded Systems - EPFLDocument44 pagesRealistic Simulation of Real-Time Embedded Systems - EPFLKhoa NguyenNo ratings yet
- Chapter1 - Introduction SMDocument36 pagesChapter1 - Introduction SMKidus FelekeNo ratings yet
- Kine Logic TechnologyDocument39 pagesKine Logic TechnologyNeda Elena AndreeaNo ratings yet
- A Vision-Based System For Monitoring The Loss of Attention in Automotive DriversDocument29 pagesA Vision-Based System For Monitoring The Loss of Attention in Automotive Driversnani yagantiNo ratings yet
- A Novel Cascade Classifier of Vehicle Unlocking System Based On Face RecognitionDocument15 pagesA Novel Cascade Classifier of Vehicle Unlocking System Based On Face RecognitionSrideviNo ratings yet
- V Rep1Document51 pagesV Rep1Iulia CostacheNo ratings yet
- Dokumen - Tips - Introduction To Applications in Robotics To Roboticsppt Real Time VideoDocument78 pagesDokumen - Tips - Introduction To Applications in Robotics To Roboticsppt Real Time VideoManh Cuong NguyenNo ratings yet
- More On Embedded Systems Mobile Robots and  - Mobile ... - EPFLDocument54 pagesMore On Embedded Systems Mobile Robots and  - Mobile ... - EPFLKhoa NguyenNo ratings yet
- CCP SyllabusDocument3 pagesCCP SyllabusVishal BoharaNo ratings yet
- Prototyping PresentationDocument27 pagesPrototyping PresentationKishan KumarNo ratings yet
- ME451 L0 IntroductionDocument239 pagesME451 L0 IntroductiontimketaNo ratings yet
- ECEL12-LAB#4 AngeladaDocument9 pagesECEL12-LAB#4 AngeladaAlehamarie AngeladaNo ratings yet
- V Rep1Document51 pagesV Rep1ANANo ratings yet
- CH 06Document43 pagesCH 06aegean227No ratings yet
- Session 6 - Benchmarks and ToolsDocument21 pagesSession 6 - Benchmarks and ToolsAbdullahKhanNo ratings yet
- Harpreet Singh CS FileDocument46 pagesHarpreet Singh CS FileTJNo ratings yet
- Developing Advanced Driver Assistance Systems (ADAS) and Functions For Autonomous DrivingDocument28 pagesDeveloping Advanced Driver Assistance Systems (ADAS) and Functions For Autonomous DrivingZul Zulhilmi100% (1)
- Syllabus PGT Computer Science PDFDocument8 pagesSyllabus PGT Computer Science PDFMaddyy210885No ratings yet
- Instrumentation Lecture 01 - IntroDocument35 pagesInstrumentation Lecture 01 - IntroAfaaq HussainNo ratings yet
- CamodocalDocument9 pagesCamodocalherusyahputraNo ratings yet
- An Embedded Module For Driver Performance Assessment and Alert SystemDocument4 pagesAn Embedded Module For Driver Performance Assessment and Alert SystemNithin VardhanNo ratings yet
- Lecture10 - Interfacing HardwareDocument13 pagesLecture10 - Interfacing HardwareBalaji RajendranNo ratings yet
- Framework of Advanced Driving Assistance System (ADAS) ResearchDocument8 pagesFramework of Advanced Driving Assistance System (ADAS) ResearchherusyahputraNo ratings yet
- Simulator Software For Turning & MillingDocument6 pagesSimulator Software For Turning & MillingJagadeesh RajamanickamNo ratings yet
- Instrumentation and Measurement: Csci 599 Class Presentation Shreyans MehtaDocument22 pagesInstrumentation and Measurement: Csci 599 Class Presentation Shreyans MehtaGammaKristianNo ratings yet
- Instrumentation and Measurement: Csci 599 Class Presentation Shreyans MehtaDocument22 pagesInstrumentation and Measurement: Csci 599 Class Presentation Shreyans MehtaMuhammad Usman SindhuNo ratings yet
- Instrumentation and Measurement: Csci 599 Class Presentation Shreyans MehtaDocument22 pagesInstrumentation and Measurement: Csci 599 Class Presentation Shreyans Mehtaindrakonwar1541No ratings yet
- Instrumentation and Measurement: Csci 599 Class Presentation Shreyans MehtaDocument22 pagesInstrumentation and Measurement: Csci 599 Class Presentation Shreyans Mehtaaly_wael71No ratings yet
- Robot Simulator V-RepDocument2 pagesRobot Simulator V-Repandymultazam100% (1)
- Instrumentation and Measurement: Csci 599 Class Presentation Shreyans MehtaDocument22 pagesInstrumentation and Measurement: Csci 599 Class Presentation Shreyans MehtaKamal Singh RathoreNo ratings yet
- ICTEST1Document54 pagesICTEST1sakthivelNo ratings yet
- Robot Vision enDocument8 pagesRobot Vision enshehan2008No ratings yet
- Chapter 2-Modeling, Simulation and Prototyping of Systems in Mechatronics ContextDocument39 pagesChapter 2-Modeling, Simulation and Prototyping of Systems in Mechatronics ContextRahul AshokNo ratings yet
- Vision Based Gesture in Embedded DevicesDocument20 pagesVision Based Gesture in Embedded Devicesmukeshkb4uNo ratings yet
- FluentDocument30 pagesFluentijaz fazilNo ratings yet
- M4 PLC - SCADA Ind. AutomationDocument3 pagesM4 PLC - SCADA Ind. AutomationA2IT Pvt. Ltd.No ratings yet
- Fundamentals of Motion ControlDocument15 pagesFundamentals of Motion ControlGoran MiljkovicNo ratings yet
- FinalDocument33 pagesFinalanushaNo ratings yet
- AutoML ToolsDocument2 pagesAutoML ToolsAayush ChaudhryNo ratings yet
- Introduction To TCAD - PresentationDocument15 pagesIntroduction To TCAD - PresentationM.SadatNo ratings yet
- 4314 Asg2 - ConcDocument30 pages4314 Asg2 - Concapi-723823461No ratings yet
- How To Access The Rapid Adoption Kits?Document11 pagesHow To Access The Rapid Adoption Kits?Kumar KumarNo ratings yet
- Using Nonlinear Kalman Filtering To Estimate SignalsDocument12 pagesUsing Nonlinear Kalman Filtering To Estimate SignalskonyeinNo ratings yet
- Using Python To Develop Your Vision Algorithm On Your Robot - FinalDocument29 pagesUsing Python To Develop Your Vision Algorithm On Your Robot - FinalCristian Acevedo BecerraNo ratings yet
- Basics Simulation TechnologyDocument26 pagesBasics Simulation TechnologybunsenNo ratings yet
- Using RecurdynDocument7 pagesUsing RecurdynAlireza safazadehNo ratings yet
- PGTComputerScienceDocument10 pagesPGTComputerSciencegulsankalsai035No ratings yet
- Real Time System1Document71 pagesReal Time System1Manikandan AnnamalaiNo ratings yet
- Monitorama2015netflixinstanceanalysis 150616190732 Lva1 App6892Document69 pagesMonitorama2015netflixinstanceanalysis 150616190732 Lva1 App6892csy365No ratings yet
- Lab Manual ESMS PDFDocument108 pagesLab Manual ESMS PDFAbhishek KumarNo ratings yet
- An Automated Quadcopter CAD Based Design and Modeling Platform Using Solidworks API and Smart Dynamic AssemblyDocument10 pagesAn Automated Quadcopter CAD Based Design and Modeling Platform Using Solidworks API and Smart Dynamic AssemblyNeeox- NuNo ratings yet
- (MCDPR Team) Progressive - Report - 20240330 (SDY, HSK, OTG, JMJ)Document16 pages(MCDPR Team) Progressive - Report - 20240330 (SDY, HSK, OTG, JMJ)주민재No ratings yet
- ECE153a/253 Embedded Systems Class OverviewDocument41 pagesECE153a/253 Embedded Systems Class OverviewAjay ShekarNo ratings yet
- A Fuzzy Logic Control Project For A Real-Time Microprocessor LaboratoryDocument6 pagesA Fuzzy Logic Control Project For A Real-Time Microprocessor LaboratoryZelalem TarekegnNo ratings yet
- Hilbert Transformer Notes-5Document10 pagesHilbert Transformer Notes-5prajwalNo ratings yet
- Iir-Mzt Notes-4 PDFDocument9 pagesIir-Mzt Notes-4 PDFprajwalNo ratings yet
- Fir Kaiser Window Notes-3 PDFDocument19 pagesFir Kaiser Window Notes-3 PDFprajwalNo ratings yet
- Review Unit5 Linear AlgebraDocument15 pagesReview Unit5 Linear AlgebraprajwalNo ratings yet
- Sreenu NotesDocument32 pagesSreenu NotesprajwalNo ratings yet
- Network TheoremsDocument6 pagesNetwork TheoremsprajwalNo ratings yet
- Unit-3 Probability and Random VariablesDocument39 pagesUnit-3 Probability and Random VariablesprajwalNo ratings yet
- Gujarat Technological UniversityDocument2 pagesGujarat Technological Universityfeyayel988No ratings yet
- Learning Unit 1 Hardware PP2Document53 pagesLearning Unit 1 Hardware PP2Franciscà MuthambiNo ratings yet
- Hirschmann Easy - Industrial Standard Solutions - Original - 110315Document8 pagesHirschmann Easy - Industrial Standard Solutions - Original - 110315Manuel GonzalezNo ratings yet
- 3D IC TechnologyDocument16 pages3D IC TechnologyRam VBITNo ratings yet
- SafeNet Sentinel End User GuideDocument24 pagesSafeNet Sentinel End User Guidelgskumar2010No ratings yet
- First Generation ComputersDocument6 pagesFirst Generation ComputersjayantabhbasuNo ratings yet
- Tugas Recount TextDocument1 pageTugas Recount Text.No ratings yet
- Cloud Printing An Upcoming TechnologyDocument21 pagesCloud Printing An Upcoming TechnologyPurushothama ReddyNo ratings yet
- Computer Science and Programming PDFDocument8 pagesComputer Science and Programming PDFKenvyl PhamNo ratings yet
- 47) Distributed Computing For E-LearningDocument4 pages47) Distributed Computing For E-LearningTunnu SunnyNo ratings yet
- Chapter 10: Device Discovery, Management, and MaintenanceDocument59 pagesChapter 10: Device Discovery, Management, and MaintenanceevamNo ratings yet
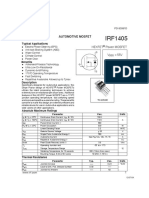
- Automotive Mosfet: Typical ApplicationsDocument10 pagesAutomotive Mosfet: Typical ApplicationsSaikumarNo ratings yet
- Chapter 26 CroppedDocument36 pagesChapter 26 Croppedgrantswaim100% (1)
- Nitgen NAC 2500 PLUS Fingerprint Access Controller Terminal Installation Manual PDFDocument20 pagesNitgen NAC 2500 PLUS Fingerprint Access Controller Terminal Installation Manual PDFSaiful ZuhriNo ratings yet
- RPC Client Server For Calculator ProgramDocument3 pagesRPC Client Server For Calculator Programsaranya n rNo ratings yet
- Automatic Temperature Control System Using Arduino: Kyi - Kyi - Khaing@miit - Edu.mmDocument8 pagesAutomatic Temperature Control System Using Arduino: Kyi - Kyi - Khaing@miit - Edu.mmAli Adnan100% (1)
- Marimuthu's ResumeDocument2 pagesMarimuthu's Resumemuthu vNo ratings yet
- Discord Name Device CPU Cpu TDP (Stapm) Cpu Max TDP Cpu Min TDPDocument6 pagesDiscord Name Device CPU Cpu TDP (Stapm) Cpu Max TDP Cpu Min TDPDuvan CharaNo ratings yet
- XV2-2T0 Wi-Fi 6 Outdoor Access Point: 802.11ax Dual-Radio, 2x2Document8 pagesXV2-2T0 Wi-Fi 6 Outdoor Access Point: 802.11ax Dual-Radio, 2x2innovativekalu9263No ratings yet
- Ecomat 100 Mobile Cr0301Document213 pagesEcomat 100 Mobile Cr0301mario kostovNo ratings yet
- DEB-HAR-21-2018-2019-337-PPR-BACHELOR of COMPUTER ApplicationDocument26 pagesDEB-HAR-21-2018-2019-337-PPR-BACHELOR of COMPUTER ApplicationAshok poddarNo ratings yet
- Metallic Technical OverviewDocument15 pagesMetallic Technical OverviewrajNo ratings yet
- Motorola Power Controller: by Sasi Kumar C Development EngineerDocument68 pagesMotorola Power Controller: by Sasi Kumar C Development EngineerVenkat RaoNo ratings yet
- 2a-HashiCorp Configuration LanguageDocument5 pages2a-HashiCorp Configuration Languagesomnathmishra41No ratings yet
- Discrete Cosine Transform (DCT) : Richard KelleyDocument21 pagesDiscrete Cosine Transform (DCT) : Richard Kelleypranu01234No ratings yet
- CCNA 3 - ENSA Practice PT Skills Assessment (PTSA) AnswersDocument19 pagesCCNA 3 - ENSA Practice PT Skills Assessment (PTSA) Answersfabrizio fioriNo ratings yet
- SELinux For DummiesDocument38 pagesSELinux For DummiesdbahanyNo ratings yet
- Mitra Ch13 3edDocument9 pagesMitra Ch13 3edMohammad Khairul Halim RimonNo ratings yet
- Ut62256cpc 70LLDocument12 pagesUt62256cpc 70LLElida Sari LubisNo ratings yet
- VLSI Problems of Chapter 3Document5 pagesVLSI Problems of Chapter 3Ahsan MoinNo ratings yet