You might also like
- Real-Time Earthquake Tracking and Localisation: A Formulation for Elements in Earthquake Early Warning Systems (Eews)From EverandReal-Time Earthquake Tracking and Localisation: A Formulation for Elements in Earthquake Early Warning Systems (Eews)No ratings yet
- A Volcano Monitoring and Prediction ToolDocument13 pagesA Volcano Monitoring and Prediction ToolLILANo ratings yet
- Automatic Multichannel Volcano-Seismic Classification Using Machine Learning and EMDDocument10 pagesAutomatic Multichannel Volcano-Seismic Classification Using Machine Learning and EMDSamuelPereiraNo ratings yet
- Concept Study of Radar Sensors For Near-Field Tsunami Early WarningDocument8 pagesConcept Study of Radar Sensors For Near-Field Tsunami Early WarningcimasukNo ratings yet
- Volcano SeismologyDocument42 pagesVolcano SeismologyDewi Ummu ZubairNo ratings yet
- ScalogramsDocument10 pagesScalogramsMajid KhanNo ratings yet
- Automatic Detection of Snow Avalanches in Continuous SeismicDocument15 pagesAutomatic Detection of Snow Avalanches in Continuous SeismicGraceSevillanoNo ratings yet
- Chapter 11.Document126 pagesChapter 11.Bimo Gunners Respati100% (1)
- Chapter 11 Temp NMSOPDocument126 pagesChapter 11 Temp NMSOPAndiyansyah SabaraniNo ratings yet
- Disaster ManagementDocument15 pagesDisaster Managementshruti9923No ratings yet
- EoS Transactions - 2011 - HoshibaDocument4 pagesEoS Transactions - 2011 - HoshibaAriska RudyantoNo ratings yet
- Extreme Space-Weather Events and The Solar CycleDocument19 pagesExtreme Space-Weather Events and The Solar CycleGlauci GrohsNo ratings yet
- Rockburst Hazard Estimation Through Seismic CharacterizationDocument14 pagesRockburst Hazard Estimation Through Seismic CharacterizationCatalina Andrea Badilla QuiñonesNo ratings yet
- Attenuation Model For Wireless Sensor Network For Underground Large Scale Tectonic Event MonitoringDocument8 pagesAttenuation Model For Wireless Sensor Network For Underground Large Scale Tectonic Event MonitoringTara GonzalesNo ratings yet
- Chapter 8 Rev1Document60 pagesChapter 8 Rev1César Augusto Cardona ParraNo ratings yet
- 1 s2.0 S0034425718301433 MainDocument10 pages1 s2.0 S0034425718301433 Mainmanuel zafraNo ratings yet
- Seismology: by Lynn R. Sykes and Paul G. RichardsDocument6 pagesSeismology: by Lynn R. Sykes and Paul G. RichardsBobby WskNo ratings yet
- TMP 5 EB1Document5 pagesTMP 5 EB1FrontiersNo ratings yet
- Convertito Et Al_Deep Learning_Predicting Induced EventsDocument17 pagesConvertito Et Al_Deep Learning_Predicting Induced EventsFrank PukNo ratings yet
- Remote SensingDocument31 pagesRemote SensingKousik BiswasNo ratings yet
- Performance Evaluation of Earthquake Detection Algorithm Used by Mexico's Seismic Alert SystemDocument14 pagesPerformance Evaluation of Earthquake Detection Algorithm Used by Mexico's Seismic Alert SystemMARIA DEL CARMEN RIOS PEREANo ratings yet
- Earthquake Classification Location and eDocument16 pagesEarthquake Classification Location and eMiguel VidalNo ratings yet
- Wu and Kanamori2005Document8 pagesWu and Kanamori2005Sajan KcNo ratings yet
- REMOTE ASatelliteBasedTsunamiEarlyWarningSystemDocument5 pagesREMOTE ASatelliteBasedTsunamiEarlyWarningSystemnajibajibNo ratings yet
- Cosmo-SkyMed Flood Mapping in MyanmarDocument13 pagesCosmo-SkyMed Flood Mapping in MyanmarIvanNo ratings yet
- 27th Seismic Research Review: Ground-Based Nuclear MonitoringDocument9 pages27th Seismic Research Review: Ground-Based Nuclear MonitoringKoko MasterNo ratings yet
- TMP 7 F03Document11 pagesTMP 7 F03FrontiersNo ratings yet
- Short Communication: Monitoring Rockfalls With The Raspberry ShakeDocument9 pagesShort Communication: Monitoring Rockfalls With The Raspberry ShakeFelipe RincónNo ratings yet
- 2019 Prediction Slope Failure by-InSAR ScientificreportsDocument9 pages2019 Prediction Slope Failure by-InSAR ScientificreportsEstebanNo ratings yet
- A 3-Year Study of Cloud-To-Ground Lightning Flash Characteristics of Mesoscale Convective Systems Over The Western Mediterranean SeaDocument19 pagesA 3-Year Study of Cloud-To-Ground Lightning Flash Characteristics of Mesoscale Convective Systems Over The Western Mediterranean SeagnomonicoNo ratings yet
- Nanoseismic Monitoring Fills The Gap PDFDocument8 pagesNanoseismic Monitoring Fills The Gap PDFputih_138242459No ratings yet
- DART II Description 6 4 05 PDFDocument15 pagesDART II Description 6 4 05 PDFGalih TaqwatomoNo ratings yet
- Rapid Tsunami Models and Earthquake Source Parameters: Far-Field and Local ApplicationsDocument10 pagesRapid Tsunami Models and Earthquake Source Parameters: Far-Field and Local ApplicationsJoseph BarnesNo ratings yet
- Apotsos Etal PureAppliedGeo 2011 Delft TsunamiDocument23 pagesApotsos Etal PureAppliedGeo 2011 Delft Tsunamimazlan727No ratings yet
- Earthquakes (2) : Waveform Modeling, Moment Tensors, & Source ParametersDocument42 pagesEarthquakes (2) : Waveform Modeling, Moment Tensors, & Source ParametershanumabendadiNo ratings yet
- Ggs 083 FontDocument24 pagesGgs 083 FontMafer ReyesNo ratings yet
- TRMM LectureDocument31 pagesTRMM Lecturelallu24No ratings yet
- Terrestrial Gamma Ray Flashes Correlated To Storm Phase and Tropopause HeightDocument10 pagesTerrestrial Gamma Ray Flashes Correlated To Storm Phase and Tropopause HeightBengt HörbergNo ratings yet
- Observations of Gravity WavesDocument6 pagesObservations of Gravity WavesVermilion~No ratings yet
- 2010-GEOPHYSICS Reservoir Characterization Using Surface Microseismic Monitoring PDFDocument8 pages2010-GEOPHYSICS Reservoir Characterization Using Surface Microseismic Monitoring PDFVirgina Claudia LatengkeNo ratings yet
- 135 2014 Wu Pure and Applied Geophysics EEWDocument10 pages135 2014 Wu Pure and Applied Geophysics EEWAriska RudyantoNo ratings yet
- 1 s2.0 S0895981120306520 MainDocument12 pages1 s2.0 S0895981120306520 MainCarla Dospesos SalinasNo ratings yet
- MLDocDocument5 pagesMLDocChristina NadaNo ratings yet
- Reid Etal ISL 2008 PDFDocument13 pagesReid Etal ISL 2008 PDFAndreas D. HuriNo ratings yet
- A Threshold-Based Earthquake Early Warning Using DDocument13 pagesA Threshold-Based Earthquake Early Warning Using DMila AprianiNo ratings yet
- Forecasting Significant Earthquakes IDocument10 pagesForecasting Significant Earthquakes IVewal MoslyNo ratings yet
- A European Lightning Density Analysis Using 5 Years of Atdnet DataDocument15 pagesA European Lightning Density Analysis Using 5 Years of Atdnet DataVigneshwaran KandaswamyNo ratings yet
- Olcanic Eismology: Stephen R. McnuttDocument36 pagesOlcanic Eismology: Stephen R. McnuttAgustin DugaroNo ratings yet
- Mwre-Mwr3433 1Document12 pagesMwre-Mwr3433 1pablocantabriaNo ratings yet
- Drouet 2005Document18 pagesDrouet 2005Luis Armando ParraNo ratings yet
- ML14293A559Document63 pagesML14293A559Colin RigleyNo ratings yet
- R S A V: Emote Ensing of Ctive OlcanoesDocument33 pagesR S A V: Emote Ensing of Ctive OlcanoesAdnan ChoeriNo ratings yet
- Relationship between Mw and ML for small earthquakesDocument8 pagesRelationship between Mw and ML for small earthquakesQuangNguyenVanNo ratings yet
- Font Et Al 2013Document24 pagesFont Et Al 2013DanielNo ratings yet
- Seismo 1 ShearerDocument39 pagesSeismo 1 ShearerSerruchin 84No ratings yet
- Amt 8 649 2015Document21 pagesAmt 8 649 2015Ashish KumarNo ratings yet
- Earthquake InstrumentsDocument27 pagesEarthquake InstrumentsJoshua John JulioNo ratings yet
- 15WCEE Atkinson PaperDocument10 pages15WCEE Atkinson Papergorgika papandNo ratings yet
- Ijet V3i2p9Document5 pagesIjet V3i2p9International Journal of Engineering and TechniquesNo ratings yet
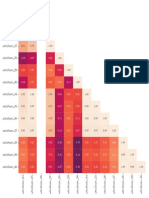
- Correlation MatrixDocument1 pageCorrelation MatrixMuhajir AnshoriNo ratings yet
- Reverse Time MigrationDocument2 pagesReverse Time MigrationMuhajir AnshoriNo ratings yet
- Groundmotionamplificationcharacteristicsat Sharm El Sheikareausing HvsrmethodDocument8 pagesGroundmotionamplificationcharacteristicsat Sharm El Sheikareausing HvsrmethodMuhajir AnshoriNo ratings yet
- EGU21 15888 PrintDocument2 pagesEGU21 15888 PrintMuhajir AnshoriNo ratings yet
- Seismic Attributes UserDocument20 pagesSeismic Attributes UserMuhajir AnshoriNo ratings yet
- Muksin Jurnal15Document12 pagesMuksin Jurnal15Muhajir AnshoriNo ratings yet
- VPS3 PsDocument1 pageVPS3 PsMuhajir AnshoriNo ratings yet
- Biisee YagiDocument6 pagesBiisee YagicimasukNo ratings yet
- A 3D Shear Wave Velocity Model For Myanmar Region: December 2018Document24 pagesA 3D Shear Wave Velocity Model For Myanmar Region: December 2018uphyomgmgNo ratings yet
- Tomografi Seismik (Penerbit ITB Press 2017, ISBN 978-602-5417-48-1)Document2 pagesTomografi Seismik (Penerbit ITB Press 2017, ISBN 978-602-5417-48-1)Muhajir AnshoriNo ratings yet
- Mat SMPDocument36 pagesMat SMPMuhajir AnshoriNo ratings yet
- 1978 Minster JGR Present-Day PDFDocument24 pages1978 Minster JGR Present-Day PDFMuhajir AnshoriNo ratings yet
- Materials and Techniques for Studying the Core-Mantle BoundaryDocument8 pagesMaterials and Techniques for Studying the Core-Mantle BoundaryMuhajir AnshoriNo ratings yet
- Long-term self-noise estimates of seismic sensors from high-noise vault installationsDocument1 pageLong-term self-noise estimates of seismic sensors from high-noise vault installationsMuhajir AnshoriNo ratings yet
- 12.570 - Structure and Dynamics of The CMB RegionDocument9 pages12.570 - Structure and Dynamics of The CMB RegionMuhajir AnshoriNo ratings yet
- Introduction to Earthquake Particle MotionDocument5 pagesIntroduction to Earthquake Particle MotionMuhajir AnshoriNo ratings yet
- For Information About Installing, Running and Configuring Firefox Including A List of Known Issues and Troubleshooting InformationDocument1 pageFor Information About Installing, Running and Configuring Firefox Including A List of Known Issues and Troubleshooting InformationMuhajir AnshoriNo ratings yet
- Ob Spy TutorialDocument77 pagesOb Spy TutorialMuhajir Anshori100% (1)
- GreenDocument8 pagesGreenMuhajir AnshoriNo ratings yet
- Wape NaarDocument1 pageWape NaarMuhajir AnshoriNo ratings yet
- For Information About Installing, Running and Configuring Firefox Including A List of Known Issues and Troubleshooting InformationDocument1 pageFor Information About Installing, Running and Configuring Firefox Including A List of Known Issues and Troubleshooting InformationMuhajir AnshoriNo ratings yet
- Manual 315 PDFDocument155 pagesManual 315 PDFNikitsoNo ratings yet
- Aurasma Partner Guidelines PDFDocument100 pagesAurasma Partner Guidelines PDFAlice StancescuNo ratings yet
- WebGoat LessonsDocument5 pagesWebGoat LessonsPhil100% (1)
- Affordable Matrimonial Website Script PricingDocument9 pagesAffordable Matrimonial Website Script PricingAjayNo ratings yet
- Sharing Mobility Italy-MilanoDocument276 pagesSharing Mobility Italy-MilanoAwais SadaqatNo ratings yet
- PPC 101 FinalDocument34 pagesPPC 101 FinalGulzar Associates (3D Architectural Designer)No ratings yet
- INTELLINET - Wireless 300N 3G Router Quick InstallDocument16 pagesINTELLINET - Wireless 300N 3G Router Quick InstallEvan Uriel Gallian EscarsegaNo ratings yet
- SRS Lab 2Document8 pagesSRS Lab 2kerzebirtuNo ratings yet
- Using Oracle Autonomous Data Warehouse Dedicated Exadata InfrastructureDocument123 pagesUsing Oracle Autonomous Data Warehouse Dedicated Exadata InfrastructuremadhusribNo ratings yet
- Bank Data Sync SystemDocument4 pagesBank Data Sync SystemCOMACO DATANo ratings yet
- RHCSA Exam Questions With Answers - LINUX - IT Certification Forum PDFDocument6 pagesRHCSA Exam Questions With Answers - LINUX - IT Certification Forum PDFaserraa0% (4)
- CST 300 ResumeDocument1 pageCST 300 Resumeapi-653635066No ratings yet
- AZ 301 StarWarDocument188 pagesAZ 301 StarWarranjeetsingh2908No ratings yet
- Affiliate Marketing Just Got EASY!: CPA ArbitrageDocument76 pagesAffiliate Marketing Just Got EASY!: CPA ArbitragewNo ratings yet
- Social Media For AgricultureDocument82 pagesSocial Media For AgricultureKollin Rukundo0% (1)
- Guidelines For Writing Policy and ProcedureDocument4 pagesGuidelines For Writing Policy and ProcedurerussellhtNo ratings yet
- Google AdSense - Terms and ConditionsDocument1 pageGoogle AdSense - Terms and Conditionsshaistarasheed9622No ratings yet
- Writing SEO Friendly Blog Posts That ConvertDocument5 pagesWriting SEO Friendly Blog Posts That ConvertValentina VochNo ratings yet
- Deploying A Classic ASP Server (IIS 7)Document3 pagesDeploying A Classic ASP Server (IIS 7)Sandeep RoyNo ratings yet
- Cheatsheet Template Joomla!3Document1 pageCheatsheet Template Joomla!3brunov99No ratings yet
- Owner Owner Manual Manual: Cloud Based Remote Monitoring SystemDocument90 pagesOwner Owner Manual Manual: Cloud Based Remote Monitoring SystemCida AlvesNo ratings yet
- Digital Marketing AssignmentDocument6 pagesDigital Marketing AssignmentshivaniNo ratings yet
- Gmail - Trend - Test Interviewer SoftwareDocument2 pagesGmail - Trend - Test Interviewer SoftwareJosselin GuerracheNo ratings yet
- TRADINGVIEW PREMIUMDocument20 pagesTRADINGVIEW PREMIUMSayaNo ratings yet
- EffectofGadgetonstudentbyAsifChuadhryDocument13 pagesEffectofGadgetonstudentbyAsifChuadhrysurnamekolalamoveNo ratings yet
- HTML 5 FormsDocument4 pagesHTML 5 Formstiik27No ratings yet
- Bizhub c287 c227 - Additional Information - en - 3 1 0Document30 pagesBizhub c287 c227 - Additional Information - en - 3 1 0gnormaNo ratings yet
- Nigerian Software Engineer Resume - Odekunle Oluwatobi AlaoDocument4 pagesNigerian Software Engineer Resume - Odekunle Oluwatobi Alaoodekunle oluwatobi alaoNo ratings yet
- CSC 134 Bab 1 - Part 2Document42 pagesCSC 134 Bab 1 - Part 2aqilah qylaaNo ratings yet
- Notepad Internals (: A Note Taking App)Document7 pagesNotepad Internals (: A Note Taking App)Shifalee khanNo ratings yet