You might also like
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5806)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1091)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (842)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (589)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (897)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (122)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (401)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Practical Mapping Methods of Seagrass Beds by Satellite Remote Sensing and Ground TruthingDocument26 pagesPractical Mapping Methods of Seagrass Beds by Satellite Remote Sensing and Ground TruthingPrastyo Abi WidyanantoNo ratings yet
- 4GDocument13 pages4GShah hussain KhanNo ratings yet
- 2-Electricidad - Automatismos Electricos Con ContactoresDocument52 pages2-Electricidad - Automatismos Electricos Con Contactoresfranklin stevenNo ratings yet
- Communication Principles Chapter II - Amplitude ModulationDocument87 pagesCommunication Principles Chapter II - Amplitude ModulationmarwanNo ratings yet
- VHF 6222 Installation ManualDocument98 pagesVHF 6222 Installation ManualVishwas MaritronicsNo ratings yet
- Users Manual COBHAM RepeaterDocument63 pagesUsers Manual COBHAM RepeaterMatej Pavlansky100% (1)
- Introduction To The Ran14.0 Fe Ature Dynamic Target Rot Adju StmentDocument19 pagesIntroduction To The Ran14.0 Fe Ature Dynamic Target Rot Adju StmentEric KouamoNo ratings yet
- Meraki Wi-Fi6 Indoor and Outdoor AP V2Document2 pagesMeraki Wi-Fi6 Indoor and Outdoor AP V2Theingi Shwe SinNo ratings yet
- Foxtech Nimbus VTOL V2 For Mapping and Survey (X9D Combo) : User ManualDocument24 pagesFoxtech Nimbus VTOL V2 For Mapping and Survey (X9D Combo) : User ManualAdaNo ratings yet
- ATR451704 V 01Document2 pagesATR451704 V 01YarinaNo ratings yet
- New Developments in Satcom Amplifiers and Antennas Ebook PDFDocument20 pagesNew Developments in Satcom Amplifiers and Antennas Ebook PDFlinoNo ratings yet
- NR 900S New User Manual ENGDocument29 pagesNR 900S New User Manual ENGHồNg ThânNo ratings yet
- XPR3300e XPR3500e Basic Service Manual MN002209A01-AA V1Document114 pagesXPR3300e XPR3500e Basic Service Manual MN002209A01-AA V1Roxana Aldea-CiaciruNo ratings yet
- WCC Module-3 Notes PDFDocument57 pagesWCC Module-3 Notes PDFBRUNDA R VNo ratings yet
- Ericsson 3G Chapter 1 (General) - WCDMA RAN OptDocument47 pagesEricsson 3G Chapter 1 (General) - WCDMA RAN OptMehmet Can KahramanNo ratings yet
- Aip Indonesia (Vol Ii) Warr Ad 2 - 1Document25 pagesAip Indonesia (Vol Ii) Warr Ad 2 - 1D3 PST-1 APIBNo ratings yet
- Antenna and Wave PropagationDocument3 pagesAntenna and Wave PropagationPushpendra Singh Rathore0% (1)
- Methods To Reduce Radiated Emissions From Optical TransceiversDocument5 pagesMethods To Reduce Radiated Emissions From Optical TransceiversParthasarathi PalaiNo ratings yet
- LEA 3 - Intro To Industrial Security ConceptsDocument61 pagesLEA 3 - Intro To Industrial Security ConceptsrolandopanginahogNo ratings yet
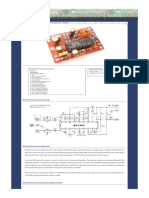
- Home Store Blog Schematics Tutorials Downloads Contact: Ba1404 Hi-Fi Stereo FM Transmitter 88 - 108 MHZDocument2 pagesHome Store Blog Schematics Tutorials Downloads Contact: Ba1404 Hi-Fi Stereo FM Transmitter 88 - 108 MHZRobert BainNo ratings yet
- 5G NR and Enhancements From R15 To R16 Hai Tang Full ChapterDocument51 pages5G NR and Enhancements From R15 To R16 Hai Tang Full Chapterdoris.macias219100% (17)
- Context Clues Multiple Choice ExerciseDocument14 pagesContext Clues Multiple Choice ExerciseCharlyn GanzonNo ratings yet
- The World's Most Popular DGPS Beacon Module: Key - 4 AdvantagesDocument2 pagesThe World's Most Popular DGPS Beacon Module: Key - 4 AdvantagesAranNo ratings yet
- Home Brewing A 10 GHZ SSB-CW TransverterDocument11 pagesHome Brewing A 10 GHZ SSB-CW TransverterRolandoIgorLeivaNo ratings yet
- °°°290634079 Autonomous VTOL For Avalanche Buried Searching AVIONICSDocument89 pages°°°290634079 Autonomous VTOL For Avalanche Buried Searching AVIONICSDario PanicacciNo ratings yet
- Application VT1005 PW8001 Solar E1 220829Document3 pagesApplication VT1005 PW8001 Solar E1 220829Joel DsouzaNo ratings yet
- 7772.00 DB90 Cross Polarized: Powerwave Dual Band AntennasDocument1 page7772.00 DB90 Cross Polarized: Powerwave Dual Band AntennasRubén FernándezNo ratings yet
- Amb4520R2V06 2Mxx-690-960/1710-2200-65/33-16I/19.5I-M/M-R Easyret Hybrid Triple-Beam Antenna With 3 Integrated Rcus - 2.0MDocument3 pagesAmb4520R2V06 2Mxx-690-960/1710-2200-65/33-16I/19.5I-M/M-R Easyret Hybrid Triple-Beam Antenna With 3 Integrated Rcus - 2.0MRobertNo ratings yet
- SC 50Document101 pagesSC 50tabsmt220No ratings yet
- Sputnik 1 - WikipediaDocument21 pagesSputnik 1 - WikipediaFarhan Ahmed SiyalNo ratings yet