You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- Mil Module 5Document39 pagesMil Module 5anthony70% (20)
- HRM ProjectDocument26 pagesHRM ProjectJayShah100% (1)
- Laptop Sale Agreement ToolkitDocument2 pagesLaptop Sale Agreement ToolkitYogesh KherdeNo ratings yet
- TV 18 2011 3 379 384Document6 pagesTV 18 2011 3 379 384Edy JjNo ratings yet
- Vainikainen Antennas 2 June 22 2006Document37 pagesVainikainen Antennas 2 June 22 2006Edy JjNo ratings yet
- 1.4. Buletin UNAP 2019 - Applications of Unmanned Systems in Military LogisticsDocument12 pages1.4. Buletin UNAP 2019 - Applications of Unmanned Systems in Military LogisticsEdy JjNo ratings yet
- J. Mollus. Stud.-2008-Welter-Schultes-79-87Document9 pagesJ. Mollus. Stud.-2008-Welter-Schultes-79-87Edy JjNo ratings yet
- Design of High-Efficiency Antennas For Mobile Communications DevicesDocument50 pagesDesign of High-Efficiency Antennas For Mobile Communications DevicesEdy JjNo ratings yet
- ThesisDocument64 pagesThesisEdy JjNo ratings yet
- Antene Pentru Telefoanele MobileDocument121 pagesAntene Pentru Telefoanele MobileEdy JjNo ratings yet
- Thay Sen 2005Document5 pagesThay Sen 2005Edy JjNo ratings yet
- Introducing The Hybrid Method of Moments/Finite Element Method (Mom/Fem)Document4 pagesIntroducing The Hybrid Method of Moments/Finite Element Method (Mom/Fem)Edy JjNo ratings yet
- Compact Integrated AntennasDocument26 pagesCompact Integrated AntennasEdy JjNo ratings yet
- The Effect of Increase in Dielectric Values On Specific Absorption Rate (SAR) in Eye and Head Tissues Following 900, 1800 and 2450 MHZ Radio Frequency (RF) ExposureDocument15 pagesThe Effect of Increase in Dielectric Values On Specific Absorption Rate (SAR) in Eye and Head Tissues Following 900, 1800 and 2450 MHZ Radio Frequency (RF) ExposureEdy JjNo ratings yet
- 1974.12. Electromagnetic Fields Induced Inside Arbitrarily Shaped Biological BodyDocument8 pages1974.12. Electromagnetic Fields Induced Inside Arbitrarily Shaped Biological BodyEdy JjNo ratings yet
- Miladic JelenaDocument6 pagesMiladic JelenaEdy JjNo ratings yet
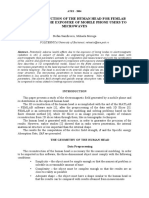
- ATEE - 2004 - SamfirescuDocument6 pagesATEE - 2004 - SamfirescuEdy JjNo ratings yet
- Unmanned Systems in Support of Future Medical Operations in Dense Urban EnvironmentsDocument28 pagesUnmanned Systems in Support of Future Medical Operations in Dense Urban EnvironmentsEdy JjNo ratings yet
- Chicago Citation: Chicago Notes-Bibliography Style GuideDocument4 pagesChicago Citation: Chicago Notes-Bibliography Style GuideElizaNo ratings yet
- STAAD ANALYSIS - Adrressing Requirements AISC 341-10 - RAM - STAAD Forum - RAM - STAAD - Bentley CommunitiesDocument2 pagesSTAAD ANALYSIS - Adrressing Requirements AISC 341-10 - RAM - STAAD Forum - RAM - STAAD - Bentley Communitieschondroc11No ratings yet
- Magenetic Chip Collector New 2Document27 pagesMagenetic Chip Collector New 2Hemasundar Reddy JolluNo ratings yet
- User Guide - JMB - JT0250003-01 (50-238Z-GB-5B-FGKUP-UK) - JMB-MAN-0007 versWEBDocument28 pagesUser Guide - JMB - JT0250003-01 (50-238Z-GB-5B-FGKUP-UK) - JMB-MAN-0007 versWEBBOUZANAS DIMITRIOSNo ratings yet
- Annual Exam COMPUTER SC Class XIDocument8 pagesAnnual Exam COMPUTER SC Class XIST JOSEPH'S SCHOOLNo ratings yet
- Vladica Ognjanovic - Curriculum VitaeDocument2 pagesVladica Ognjanovic - Curriculum VitaeVladica OgnjanovicNo ratings yet
- Using Visio PDFDocument12 pagesUsing Visio PDFAnonymous Af4ORJNo ratings yet
- CV-Sushil GuptaDocument3 pagesCV-Sushil Guptaanurag_bahety6067No ratings yet
- CMM Cable ManualDocument69 pagesCMM Cable ManualCDELVO1382No ratings yet
- Journal of Business Research: Enrico Battisti, Simona Alfiero, Erasmia LeonidouDocument13 pagesJournal of Business Research: Enrico Battisti, Simona Alfiero, Erasmia LeonidoualwiNo ratings yet
- Upload 1 Document To Download: Kill Team 2021 - Core BookDocument4 pagesUpload 1 Document To Download: Kill Team 2021 - Core BookgoneoNo ratings yet
- AI-powered Technology To Health-Check Soil and Water: Contact: Mathias SteinerDocument22 pagesAI-powered Technology To Health-Check Soil and Water: Contact: Mathias SteinerLucasNo ratings yet
- Antenna Systems Demostrator ASD512pdfDocument4 pagesAntenna Systems Demostrator ASD512pdfMiguel OrdoñezNo ratings yet
- Lathi Ls SM Chapter 2Document33 pagesLathi Ls SM Chapter 2Dr Satyabrata JitNo ratings yet
- Econstruct Issue 2Document40 pagesEconstruct Issue 2ArNushiMahfodzNo ratings yet
- Sample Performance ReportDocument33 pagesSample Performance ReportSatishreddy MandadiNo ratings yet
- Loading The Dataset: 'Churn - Modelling - CSV'Document6 pagesLoading The Dataset: 'Churn - Modelling - CSV'Divyani ChavanNo ratings yet
- Statement of Account: Date Tran Id Remarks UTR Number Instr. ID Withdrawals Deposits BalanceDocument8 pagesStatement of Account: Date Tran Id Remarks UTR Number Instr. ID Withdrawals Deposits Balancedinesh namdeoNo ratings yet
- B.inggris Bill GatesDocument1 pageB.inggris Bill GatesRoy Wijaya SembiringNo ratings yet
- Verafin CaseDocument3 pagesVerafin CaseMargaret Tariro MunemwaNo ratings yet
- CCNA Exploration 2 - Module 4 Exam Answers Version 4.0Document3 pagesCCNA Exploration 2 - Module 4 Exam Answers Version 4.0fun kollaNo ratings yet
- Intercepting #Ajax Requests in #CEFSharp (Chrome For C#) Network Programming inDocument8 pagesIntercepting #Ajax Requests in #CEFSharp (Chrome For C#) Network Programming inFaisal Tifta ZanyNo ratings yet
- ADPRO XO5.3.12 Security GuideDocument19 pagesADPRO XO5.3.12 Security Guidemichael.f.lamieNo ratings yet
- VSPlayer V7.2.0 - ENDocument27 pagesVSPlayer V7.2.0 - ENGiNo ratings yet
- Payment Notification FNBDocument1 pagePayment Notification FNBChequeNo ratings yet
- Book PDF Reliability Maintainability and Risk Practical Methods For Engineers PDF Full ChapterDocument18 pagesBook PDF Reliability Maintainability and Risk Practical Methods For Engineers PDF Full Chaptermary.turner669100% (8)
- An Open-Source Platform For Underwater Image and Video AnalyticsDocument10 pagesAn Open-Source Platform For Underwater Image and Video AnalyticsvijayforrockNo ratings yet