You might also like
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (120)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (399)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5794)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2219)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (344)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (73)
- Inside Reading 1 Answer KeyDocument45 pagesInside Reading 1 Answer KeyKarie A. Houston67% (6)
- Fatigue BookDocument195 pagesFatigue BookÖzgün KüçükNo ratings yet
- Chain,Link,Name,Value,Nominal,Min,Max SettingsDocument191 pagesChain,Link,Name,Value,Nominal,Min,Max SettingsKiyoshi Masahiro100% (2)
- Ilham Habibie-Wantiknas-Audiensi Menteri BappenasDocument21 pagesIlham Habibie-Wantiknas-Audiensi Menteri BappenasumarhidayatNo ratings yet
- O Calatorie Prin Corpul UmanDocument232 pagesO Calatorie Prin Corpul UmanAlexia Josan100% (2)
- Journal of Statistical Software: TPMSM: Estimation of The Transition Probabilities in 3-State ModelsDocument29 pagesJournal of Statistical Software: TPMSM: Estimation of The Transition Probabilities in 3-State ModelsWakaka foreverNo ratings yet
- Seven Steps To Setup A Fatigue Analysis PDFDocument6 pagesSeven Steps To Setup A Fatigue Analysis PDFWakaka foreverNo ratings yet
- Entropy: Identifying The Probability Distribution of Fatigue Life Using The Maximum Entropy PrincipleDocument19 pagesEntropy: Identifying The Probability Distribution of Fatigue Life Using The Maximum Entropy PrincipleWakaka foreverNo ratings yet
- Eur Franses AE73Document14 pagesEur Franses AE73Wakaka foreverNo ratings yet
- The Australian Journal of Agricultural EconomicsDocument13 pagesThe Australian Journal of Agricultural EconomicsWakaka foreverNo ratings yet
- IEEE TDSC 2005 Rejuv SMPDocument14 pagesIEEE TDSC 2005 Rejuv SMPWakaka foreverNo ratings yet
- A New Cumulative Damage Model-Part 3: J. L. BogdanoffDocument7 pagesA New Cumulative Damage Model-Part 3: J. L. BogdanoffWakaka foreverNo ratings yet
- Robot Notes 7-End Effectors PDFDocument10 pagesRobot Notes 7-End Effectors PDFWakaka foreverNo ratings yet
- Robot Notes 5-Robot Tasks PDFDocument6 pagesRobot Notes 5-Robot Tasks PDFWakaka foreverNo ratings yet
- ABroer MScThesis TUDelft PDFDocument139 pagesABroer MScThesis TUDelft PDFWakaka foreverNo ratings yet
- Robot Notes 6-Robot Drives PDFDocument4 pagesRobot Notes 6-Robot Drives PDFWakaka foreverNo ratings yet
- ABroer MScThesis TUDelft PDFDocument139 pagesABroer MScThesis TUDelft PDFWakaka foreverNo ratings yet
- A Review of A Time-Dependent FractureDocument14 pagesA Review of A Time-Dependent FractureWakaka foreverNo ratings yet
- Abass Adeyinka PDFDocument32 pagesAbass Adeyinka PDFVicky RahmansyahNo ratings yet
- A Review On Fatigue Life Prediction Methods For MetalsDocument27 pagesA Review On Fatigue Life Prediction Methods For MetalssajadranjbaranNo ratings yet
- A Markov Chain Approach To Big Data Ranking SystemsDocument2 pagesA Markov Chain Approach To Big Data Ranking SystemsWakaka foreverNo ratings yet
- Ijet 18998Document4 pagesIjet 18998Wakaka foreverNo ratings yet
- IJRTI1804007Document6 pagesIJRTI1804007Wakaka foreverNo ratings yet
- Fatigue Life PredictionDocument200 pagesFatigue Life PredictionShawn PrinceNo ratings yet
- Markov Chain Simulation For EstimatingDocument6 pagesMarkov Chain Simulation For EstimatingWakaka foreverNo ratings yet
- IJRTI1804007Document6 pagesIJRTI1804007Wakaka foreverNo ratings yet
- 26 November 2019 V2Document1 page26 November 2019 V2Wakaka foreverNo ratings yet
- CS8392 Oop Unit 1 NotesDocument58 pagesCS8392 Oop Unit 1 NotesChakkarawarthiNo ratings yet
- Xbox Series S 512 GB All Digital Gaming ConsoleDocument1 pageXbox Series S 512 GB All Digital Gaming ConsoleDavi SequinelNo ratings yet
- Inline Function in C++Document9 pagesInline Function in C++rajatbisht9124No ratings yet
- Openshift Container Platform 4.6Document34 pagesOpenshift Container Platform 4.6Chinni MunniNo ratings yet
- Asphalt 8 Highly Compressed 100 Workinglnahr PDFDocument1 pageAsphalt 8 Highly Compressed 100 Workinglnahr PDFSinclairEjlersen58No ratings yet
- DISM Pro Questions SolvedDocument5 pagesDISM Pro Questions SolvedShah OwaisNo ratings yet
- Industrial Pioneers - Brilliant Minds. Steve Jobs and Bill GatesDocument8 pagesIndustrial Pioneers - Brilliant Minds. Steve Jobs and Bill GatesXimena AtehortuaNo ratings yet
- Thesis 2020 07 11Document182 pagesThesis 2020 07 11Kevin Prayogo ChoissNo ratings yet
- Riscv Privileged 20211203Document155 pagesRiscv Privileged 20211203Naveen ChavaliNo ratings yet
- Result Management System: Student Maagement Exam ManagementDocument7 pagesResult Management System: Student Maagement Exam ManagementDIPALI SONTAKINo ratings yet
- SRN/ SEN15/ SEN25: General Electric HornsDocument2 pagesSRN/ SEN15/ SEN25: General Electric HornsRigoberto GomezNo ratings yet
- Computer Fraud and Abuse TechniquesDocument17 pagesComputer Fraud and Abuse Techniqueszanmatto22No ratings yet
- Tour 2020Document238 pagesTour 2020David López CallejaNo ratings yet
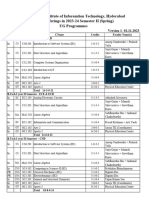
- CourseOfferings-S24-V1 (IIITH)Document11 pagesCourseOfferings-S24-V1 (IIITH)Arza SiddiquiNo ratings yet
- Interscan Web Security Virtual Appliance: Trend MicroDocument4 pagesInterscan Web Security Virtual Appliance: Trend MicroriyasathsafranNo ratings yet
- ASD Lab Manual JECC QueriesDocument34 pagesASD Lab Manual JECC QueriesarathyNo ratings yet
- Guide Book - SMT2 Eco-Ta - 6.2Document38 pagesGuide Book - SMT2 Eco-Ta - 6.2Automotive ElectronicsNo ratings yet
- CDHDocument1 pageCDHabhinishthaNo ratings yet
- Asian School of Management and Technology: Affiliated To Tribhuvan University Gongabu, KathmanduDocument34 pagesAsian School of Management and Technology: Affiliated To Tribhuvan University Gongabu, KathmandukathikNo ratings yet
- Outdoor Integrated Cabinet ICC710-HA1-C7 (01075400) Datasheet 03 - (20201031)Document2 pagesOutdoor Integrated Cabinet ICC710-HA1-C7 (01075400) Datasheet 03 - (20201031)Odai Kiwan100% (1)
- 1168 Timesnet Temporal 2d VariationDocument23 pages1168 Timesnet Temporal 2d Variationwowexo4683No ratings yet
- 555 Timer IC - WikipediaDocument20 pages555 Timer IC - WikipediaJuniorNo ratings yet
- Top 10 Photoshop SecretsDocument10 pagesTop 10 Photoshop SecretsGheorghe HibovskiNo ratings yet
- Topic 3 - NetworksDocument76 pagesTopic 3 - NetworksDiandra Satria AdhitamaNo ratings yet
- Motorola 6800: From Wikipedia, The Free EncyclopediaDocument10 pagesMotorola 6800: From Wikipedia, The Free EncyclopediamarzukijalilNo ratings yet
- Mangalam Cement LTDDocument1 pageMangalam Cement LTDChetan DadhichNo ratings yet