You might also like
- Analysis of Attack Angle Effect On Flow Characteristics Around Torpedo-Like Geometry Placed Near The Free-Surface Via CFDDocument16 pagesAnalysis of Attack Angle Effect On Flow Characteristics Around Torpedo-Like Geometry Placed Near The Free-Surface Via CFDSAIDINo ratings yet
- Theoretical Fluid Dynamics: Achim FeldmeierDocument579 pagesTheoretical Fluid Dynamics: Achim FeldmeierSAIDI100% (1)
- Determination of The Hydrodynamic Parameters of An Underwater Vehicle During Small Scale, Nonuniform, 1-Dimensional TranslationDocument7 pagesDetermination of The Hydrodynamic Parameters of An Underwater Vehicle During Small Scale, Nonuniform, 1-Dimensional TranslationSAIDINo ratings yet
- Determination of Flow Parameters of A Water Flow ADocument19 pagesDetermination of Flow Parameters of A Water Flow ASAIDINo ratings yet
- Comparisons of CFD Simulations and In-Service Data For The Self Propelled Performance of An Autonomous Underwater VehicleDocument15 pagesComparisons of CFD Simulations and In-Service Data For The Self Propelled Performance of An Autonomous Underwater VehicleSAIDINo ratings yet
- A345113 258 3 PDFDocument9 pagesA345113 258 3 PDFSAIDINo ratings yet
- The Yellow House: A Memoir (2019 National Book Award Winner)From EverandThe Yellow House: A Memoir (2019 National Book Award Winner)Rating: 4 out of 5 stars4/5 (98)
- The Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeFrom EverandThe Subtle Art of Not Giving a F*ck: A Counterintuitive Approach to Living a Good LifeRating: 4 out of 5 stars4/5 (5795)
- Shoe Dog: A Memoir by the Creator of NikeFrom EverandShoe Dog: A Memoir by the Creator of NikeRating: 4.5 out of 5 stars4.5/5 (537)
- Elon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureFrom EverandElon Musk: Tesla, SpaceX, and the Quest for a Fantastic FutureRating: 4.5 out of 5 stars4.5/5 (474)
- Grit: The Power of Passion and PerseveranceFrom EverandGrit: The Power of Passion and PerseveranceRating: 4 out of 5 stars4/5 (588)
- On Fire: The (Burning) Case for a Green New DealFrom EverandOn Fire: The (Burning) Case for a Green New DealRating: 4 out of 5 stars4/5 (74)
- A Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryFrom EverandA Heartbreaking Work Of Staggering Genius: A Memoir Based on a True StoryRating: 3.5 out of 5 stars3.5/5 (231)
- Hidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceFrom EverandHidden Figures: The American Dream and the Untold Story of the Black Women Mathematicians Who Helped Win the Space RaceRating: 4 out of 5 stars4/5 (895)
- Never Split the Difference: Negotiating As If Your Life Depended On ItFrom EverandNever Split the Difference: Negotiating As If Your Life Depended On ItRating: 4.5 out of 5 stars4.5/5 (838)
- The Little Book of Hygge: Danish Secrets to Happy LivingFrom EverandThe Little Book of Hygge: Danish Secrets to Happy LivingRating: 3.5 out of 5 stars3.5/5 (400)
- The Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersFrom EverandThe Hard Thing About Hard Things: Building a Business When There Are No Easy AnswersRating: 4.5 out of 5 stars4.5/5 (345)
- The Unwinding: An Inner History of the New AmericaFrom EverandThe Unwinding: An Inner History of the New AmericaRating: 4 out of 5 stars4/5 (45)
- Team of Rivals: The Political Genius of Abraham LincolnFrom EverandTeam of Rivals: The Political Genius of Abraham LincolnRating: 4.5 out of 5 stars4.5/5 (234)
- The World Is Flat 3.0: A Brief History of the Twenty-first CenturyFrom EverandThe World Is Flat 3.0: A Brief History of the Twenty-first CenturyRating: 3.5 out of 5 stars3.5/5 (2259)
- Devil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaFrom EverandDevil in the Grove: Thurgood Marshall, the Groveland Boys, and the Dawn of a New AmericaRating: 4.5 out of 5 stars4.5/5 (266)
- The Emperor of All Maladies: A Biography of CancerFrom EverandThe Emperor of All Maladies: A Biography of CancerRating: 4.5 out of 5 stars4.5/5 (271)
- The Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreFrom EverandThe Gifts of Imperfection: Let Go of Who You Think You're Supposed to Be and Embrace Who You AreRating: 4 out of 5 stars4/5 (1090)
- The Sympathizer: A Novel (Pulitzer Prize for Fiction)From EverandThe Sympathizer: A Novel (Pulitzer Prize for Fiction)Rating: 4.5 out of 5 stars4.5/5 (121)
- Her Body and Other Parties: StoriesFrom EverandHer Body and Other Parties: StoriesRating: 4 out of 5 stars4/5 (821)
- Solution Activity No.1Document7 pagesSolution Activity No.1Shaft SandaeNo ratings yet
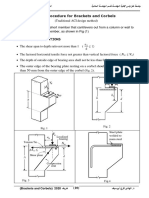
- Brackets and Corbels ACI 318 L # 1Document7 pagesBrackets and Corbels ACI 318 L # 1soran azizNo ratings yet
- Excel Engineering College, Komarapalayam: (Autonomous)Document3 pagesExcel Engineering College, Komarapalayam: (Autonomous)mythilispd_355305156No ratings yet
- 12 EC8-ReLUISDocument14 pages12 EC8-ReLUISJordan BojadzievNo ratings yet
- Sedimentation and FlotationDocument45 pagesSedimentation and FlotationJay CruzatNo ratings yet
- Mitosek1993 Article OscillatoryLiquidFlowInElasticDocument15 pagesMitosek1993 Article OscillatoryLiquidFlowInElasticbaja2014No ratings yet
- Rotational Equilibrium and Rotational DynamicsDocument12 pagesRotational Equilibrium and Rotational DynamicsCG AmonNo ratings yet
- H&MT - Lesson-21 Solid Angle and Intensity of Radiation, Radiation Heat Transfer Between Two Black BodiesDocument4 pagesH&MT - Lesson-21 Solid Angle and Intensity of Radiation, Radiation Heat Transfer Between Two Black Bodiesadimegha100% (1)
- CV6313 - AY2019-20 L3 - DowndragDocument69 pagesCV6313 - AY2019-20 L3 - DowndragLordM00nNo ratings yet
- Kevin Knuth UAP Flight CharacteristicsDocument30 pagesKevin Knuth UAP Flight CharacteristicsBogdan GhergheNo ratings yet
- A Computer Program For Designing Interplanetary Injection Trajectories (Fortran)Document22 pagesA Computer Program For Designing Interplanetary Injection Trajectories (Fortran)Anonymous REw1YIq4q7No ratings yet
- Modeling and Analysis of Connecting Rod PDFDocument4 pagesModeling and Analysis of Connecting Rod PDFPrasanth NavaNo ratings yet
- Fea QBDocument11 pagesFea QBPradeepNo ratings yet
- KinematcsDocument6 pagesKinematcsAdit Kumar100% (1)
- Edexcel 6679 Mechanics M3 January 2004 Provisional Mark SchemeDocument6 pagesEdexcel 6679 Mechanics M3 January 2004 Provisional Mark SchememetalmaniacmandarkNo ratings yet
- Supersonic Air-to-Air Ejector: Created in COMSOL Multiphysics 5.3aDocument24 pagesSupersonic Air-to-Air Ejector: Created in COMSOL Multiphysics 5.3aWill SoNo ratings yet
- Fundamentals of AerodynamicsDocument25 pagesFundamentals of AerodynamicsPaul Timothy Hao100% (3)
- Transport Phenomena III: Mass Transfer Chapter 28: Convective Mass TransferDocument23 pagesTransport Phenomena III: Mass Transfer Chapter 28: Convective Mass Transferنزار الدهاميNo ratings yet
- Kinematics Problems With SolutionDocument17 pagesKinematics Problems With SolutionApril ClaireNo ratings yet
- Strength of Materials, Structural Design & DrawingsDocument24 pagesStrength of Materials, Structural Design & Drawingsamitkap00rNo ratings yet
- MomentumDocument13 pagesMomentumAlyssa Marie L. PalamianoNo ratings yet
- Lab Report Radius of GyrationDocument4 pagesLab Report Radius of GyrationShahzaibali AfaqNo ratings yet
- Reservoir Seismic 6Document57 pagesReservoir Seismic 6Manish ChaturvediNo ratings yet
- Latest Lifting LugDocument8 pagesLatest Lifting Lugjagannadha varmaNo ratings yet
- Chapter 4 Forces and Newton's Laws of MotionDocument38 pagesChapter 4 Forces and Newton's Laws of MotionSam RajibNo ratings yet
- Sol Assign 7Document6 pagesSol Assign 7John Ray CuevasNo ratings yet
- Real-Time Image Processing For Particle Tracking VelocimetryDocument6 pagesReal-Time Image Processing For Particle Tracking VelocimetryaaaaNo ratings yet
- Debye Model - Wikipedia, The Free EncyclopediaDocument7 pagesDebye Model - Wikipedia, The Free EncyclopediaBenni WewokNo ratings yet
- Calculation Dilute Phase Pressure Drop Rhodes MethodDocument3 pagesCalculation Dilute Phase Pressure Drop Rhodes MethodBTENo ratings yet
- BeerVM11e PPT Ch11Document92 pagesBeerVM11e PPT Ch11brayanNo ratings yet