You might also like
- Excel Charts and Graph TipsDocument6 pagesExcel Charts and Graph TipsKrystalNo ratings yet
- Creative FRP Design GuideDocument255 pagesCreative FRP Design GuideVincenzo Praturlon100% (1)
- All The Words I Should Have Said - Rania NaimDocument167 pagesAll The Words I Should Have Said - Rania NaimNan Nan100% (2)
- AutoDocument5 pagesAutohem1980No ratings yet
- AtmakarakaDocument3 pagesAtmakarakaswamyvk100% (1)
- May DAY EVE LessonsDocument4 pagesMay DAY EVE LessonsFerdinand Pinon100% (1)
- Java Io NotesDocument19 pagesJava Io Notesgupta_ssrkm2747No ratings yet
- A330 RR Trent 700 Technical Training Manual General Familiarization Course - T4 General Level 1Document68 pagesA330 RR Trent 700 Technical Training Manual General Familiarization Course - T4 General Level 1Owen100% (2)
- Sample Waste Management Tracking FormDocument3 pagesSample Waste Management Tracking FormSreekumarNo ratings yet
- Scheduling: Network Techniques: Graphic Representation of Project Activities, Network AnalysisDocument62 pagesScheduling: Network Techniques: Graphic Representation of Project Activities, Network AnalysisInderjeet Singh Toor100% (1)
- Principles of Engineering Thermodynamics - SI Version 8th EditionDocument47 pagesPrinciples of Engineering Thermodynamics - SI Version 8th EditionanabNo ratings yet
- WeldingDocument46 pagesWeldingberchardNo ratings yet
- Heat ExchangersDocument77 pagesHeat ExchangersMervin PerezNo ratings yet
- Planning, Negotiating, Implementing, and Managing Wide Area Networks: A Practical GuideFrom EverandPlanning, Negotiating, Implementing, and Managing Wide Area Networks: A Practical GuideNo ratings yet
- Anapplication of Dijkstra's Algorithm To Shortest Route ProblemDocument13 pagesAnapplication of Dijkstra's Algorithm To Shortest Route ProblemGaurav KumarNo ratings yet
- Finals ReviewerDocument6 pagesFinals ReviewerMaica BarzanaNo ratings yet
- M3-Cs306-Computer Networking-Ktustudents - in PDFDocument49 pagesM3-Cs306-Computer Networking-Ktustudents - in PDFAkash T MNo ratings yet
- Three: Networks and Network Modelling and AnalysisDocument30 pagesThree: Networks and Network Modelling and AnalysisSami AnduNo ratings yet
- Maximizing Lifetime For Data Aggregation in Wireless Sensor NetworksDocument12 pagesMaximizing Lifetime For Data Aggregation in Wireless Sensor NetworksivanNo ratings yet
- Plan If 2000Document5 pagesPlan If 2000kajfahmNo ratings yet
- Cross-Layer Strategies For Throughput Maximization in A Data Aggregating Wireless NetworkDocument5 pagesCross-Layer Strategies For Throughput Maximization in A Data Aggregating Wireless Networkhmalrizzo469No ratings yet
- Literature Review and Related WorksDocument9 pagesLiterature Review and Related Worksyousef tamerNo ratings yet
- Improved Lightpath (Wavelength) Routing inDocument9 pagesImproved Lightpath (Wavelength) Routing inRashmi S IyengarNo ratings yet
- The Max FlowDocument3 pagesThe Max FlowGABRIEL IAN VELAZQUEZ UGALDENo ratings yet
- Architectural Design and Studies of Requirements in Metropolitan Area NetworksDocument17 pagesArchitectural Design and Studies of Requirements in Metropolitan Area NetworksjuampicNo ratings yet
- Impact of Computer Network Routing On Imprecise Tables and Static Vs Dynamic RoutingDocument12 pagesImpact of Computer Network Routing On Imprecise Tables and Static Vs Dynamic RoutingtheijesNo ratings yet
- A Study On Graph Theoretical Algorithms in Grid Environment: K.Periyakaruppan, T. RavichandranDocument4 pagesA Study On Graph Theoretical Algorithms in Grid Environment: K.Periyakaruppan, T. RavichandranNicolai AquinoNo ratings yet
- Effective Algorithms For Designing Power Distribution NetworksDocument8 pagesEffective Algorithms For Designing Power Distribution Networksdocs miNo ratings yet
- Pajek - Analysis & Visualization of Large NetworksDocument5 pagesPajek - Analysis & Visualization of Large NetworksElder FutharkNo ratings yet
- Research Article: Efficient Congestion Mitigation Using Congestion-Aware Steiner Trees and Network Coding TopologiesDocument9 pagesResearch Article: Efficient Congestion Mitigation Using Congestion-Aware Steiner Trees and Network Coding TopologiesRagini SandhyaNo ratings yet
- Designing Least-Cost Nonblocking Broadband NetworksDocument23 pagesDesigning Least-Cost Nonblocking Broadband NetworksSaverio_No ratings yet
- Minimum Spanning TreeDocument17 pagesMinimum Spanning TreeGomala MookanNo ratings yet
- Route Planning With Flexible Objective FunctionsDocument14 pagesRoute Planning With Flexible Objective Functionsmadan321No ratings yet
- Optimal Path Selection On TORA Algorithm Using Quadratic Assignment Techniques in WSNDocument8 pagesOptimal Path Selection On TORA Algorithm Using Quadratic Assignment Techniques in WSNMurthy MaharnaNo ratings yet
- 000000da PDFDocument24 pages000000da PDFMukesh KumarNo ratings yet
- An Adaptive Routing Algorithm For Communication Networks Using Back Pressure TechniqueDocument5 pagesAn Adaptive Routing Algorithm For Communication Networks Using Back Pressure TechniqueIJMERNo ratings yet
- Procedures and Spatial Analysis in GisDocument4 pagesProcedures and Spatial Analysis in GisTofunmi AdebajoNo ratings yet
- gMAP Efficient Construction of Global Maps For MobDocument9 pagesgMAP Efficient Construction of Global Maps For MobWassim FekiNo ratings yet
- Minimum-Time - Consensus-Based - Approach - For - Power - SystemDocument11 pagesMinimum-Time - Consensus-Based - Approach - For - Power - SystemDavid FanaiNo ratings yet
- Formal Design and Verification of On Chip Networking: Al Sammane, J. Schmaltz and BorrioneDocument2 pagesFormal Design and Verification of On Chip Networking: Al Sammane, J. Schmaltz and BorrioneMichael ZimmermanNo ratings yet
- Algirithm To Reduce CostDocument5 pagesAlgirithm To Reduce CostRaju KuruvaNo ratings yet
- Network AnalysisDocument14 pagesNetwork AnalysisTamilmani Natarajan100% (3)
- aUTOMATIC METERINGDocument12 pagesaUTOMATIC METERINGGSK MuhammadNo ratings yet
- Energy Aware MANETDocument6 pagesEnergy Aware MANETBiplav ChoudhuryNo ratings yet
- On The Deployment of Wireless Sensor NodesDocument8 pagesOn The Deployment of Wireless Sensor NodesFarah NassibNo ratings yet
- Journal of Optoelectronics LaserDocument7 pagesJournal of Optoelectronics LaserMaria Sofia Angela LiguanNo ratings yet
- The Network Layer Is Concerned With GettingDocument103 pagesThe Network Layer Is Concerned With GettingsrinusirisalaNo ratings yet
- DCN Unit-VDocument99 pagesDCN Unit-VRohan SaiNo ratings yet
- Proposal of KMSTME Data Mining Clustering Method For Prolonging Life of Wireless Sensor NetworksDocument5 pagesProposal of KMSTME Data Mining Clustering Method For Prolonging Life of Wireless Sensor NetworksMladen Maki VukNo ratings yet
- Loop-Free Routing Using Diffusing Computations: Abstract-ADocument12 pagesLoop-Free Routing Using Diffusing Computations: Abstract-Anguyendanhson1409No ratings yet
- Network PlanningDocument17 pagesNetwork Planningjure.denkNo ratings yet
- Abstract: Complex Network Systems Have Been Extensively Used To Analyze NetworkDocument12 pagesAbstract: Complex Network Systems Have Been Extensively Used To Analyze NetworkRavindra JoshiNo ratings yet
- An Energy Efficient Cluster Formation Protocol With Low Latency in Wireless Sensor NetworksDocument7 pagesAn Energy Efficient Cluster Formation Protocol With Low Latency in Wireless Sensor NetworksbhanupartapsharmaNo ratings yet
- Topological Properties of Multiprocessor Interconnection NetworkDocument8 pagesTopological Properties of Multiprocessor Interconnection NetworkSamita Prava JenaNo ratings yet
- A Clustering Algorithm Based On Mobility Properties inDocument15 pagesA Clustering Algorithm Based On Mobility Properties inPrasath SivaSubramanianNo ratings yet
- Pruning Network Coding Traffic by Network Coding - A New Class of Max-Flow AlgorithmsDocument22 pagesPruning Network Coding Traffic by Network Coding - A New Class of Max-Flow AlgorithmspjcfifaNo ratings yet
- Network Models PDFDocument45 pagesNetwork Models PDFEdrian A. MañalongNo ratings yet
- 2010 Globe AhmedDocument5 pages2010 Globe AhmedahmedabdullaNo ratings yet
- Comparative Study of Wireless Sensor Networks Energy-E Cient Topologies and Power Save ProtocolsDocument8 pagesComparative Study of Wireless Sensor Networks Energy-E Cient Topologies and Power Save ProtocolsWawan KurniawanNo ratings yet
- Dijkstra Algorithm For Feeder Routing of Radial Distribution SystemDocument6 pagesDijkstra Algorithm For Feeder Routing of Radial Distribution SystemIOSRJEN : hard copy, certificates, Call for Papers 2013, publishing of journalNo ratings yet
- V Models of Parallel Computers V. Models of Parallel Computers - After PRAM and Early ModelsDocument35 pagesV Models of Parallel Computers V. Models of Parallel Computers - After PRAM and Early Modelstt_aljobory3911No ratings yet
- Wireless Sensor NetworkDocument3 pagesWireless Sensor NetworkShounak KatyayanNo ratings yet
- Object Oriented Approach To Continuous Neighbor Discovery in Asynchronous Sensor NetworksDocument6 pagesObject Oriented Approach To Continuous Neighbor Discovery in Asynchronous Sensor NetworksIJERDNo ratings yet
- LEACH Ad HocDocument10 pagesLEACH Ad HocHimadri BhattacharjeeNo ratings yet
- On Code Design in Joint MAC Scheduling and Wireless Network CodingDocument5 pagesOn Code Design in Joint MAC Scheduling and Wireless Network Codingrahi218No ratings yet
- Cpsna ExtendedDocument27 pagesCpsna ExtendedJ LNo ratings yet
- Distance Based Cluster Formation Technique For LEACH Protocol in Wireless Sensor NetworkDocument5 pagesDistance Based Cluster Formation Technique For LEACH Protocol in Wireless Sensor NetworkInternational Journal of Application or Innovation in Engineering & ManagementNo ratings yet
- 1.1 Problem Addressed and MotivationDocument13 pages1.1 Problem Addressed and MotivationpiramanayagamNo ratings yet
- A Delay-Efficient Algorithm For Data Aggregation in Multihop Wireless Sensor NetworksDocument13 pagesA Delay-Efficient Algorithm For Data Aggregation in Multihop Wireless Sensor Networksbushra_zmNo ratings yet
- HWSN-Intra-Cluster Scheduling and Inter-Cluster Multi-Hop Routing Schemes To Maximize The Network Lifetime by A.mallareddy, M.swetha, R.yadagiri RaoDocument9 pagesHWSN-Intra-Cluster Scheduling and Inter-Cluster Multi-Hop Routing Schemes To Maximize The Network Lifetime by A.mallareddy, M.swetha, R.yadagiri Raoijr_journalNo ratings yet
- Energy Aware Routing Algorithm For WSN Applications in Border SurveillanceDocument6 pagesEnergy Aware Routing Algorithm For WSN Applications in Border SurveillanceniteshsisodiyaNo ratings yet
- Experiment 4 (Re No.)Document21 pagesExperiment 4 (Re No.)Mervin PerezNo ratings yet
- S Announcement 17260Document32 pagesS Announcement 17260Mervin PerezNo ratings yet
- S Announcement 28065Document28 pagesS Announcement 28065Mervin PerezNo ratings yet
- Quantitative Management-Assignment ModelDocument2 pagesQuantitative Management-Assignment ModelMervin PerezNo ratings yet
- Nuke WorldDocument17 pagesNuke WorldMervin PerezNo ratings yet
- Wastewater Treatment Plant v4Document46 pagesWastewater Treatment Plant v4Mervin PerezNo ratings yet
- Appdendix C ComputationDocument3 pagesAppdendix C ComputationMervin PerezNo ratings yet
- Answer - Ert 216 Midterm2Document5 pagesAnswer - Ert 216 Midterm2norsiahNo ratings yet
- Life Skills Preparation Form Grade 4Document20 pagesLife Skills Preparation Form Grade 4Ricardo DomingosNo ratings yet
- A Detailed Lesson Plan in Grade 9 Mathematic2Document3 pagesA Detailed Lesson Plan in Grade 9 Mathematic2Wenifred A. Balagan Jr.No ratings yet
- Constructionandmaintenanceof Riverembankments (Levees) - GuidelinesDocument7 pagesConstructionandmaintenanceof Riverembankments (Levees) - GuidelinesSushil DhunganaNo ratings yet
- CCINFMJ Passlist - 05082022Document2 pagesCCINFMJ Passlist - 05082022Kamlakar SadavarteNo ratings yet
- CatBoost vs. Light GBM vs. XGBoost - by Alvira Swalin - Towards Data ScienceDocument10 pagesCatBoost vs. Light GBM vs. XGBoost - by Alvira Swalin - Towards Data ScienceKrishanSinghNo ratings yet
- PPA Application - 2700 Sloat BLVD (283 Units)Document8 pagesPPA Application - 2700 Sloat BLVD (283 Units)Sasha PerigoNo ratings yet
- Shiksha Sopan April 09Document4 pagesShiksha Sopan April 09Amrendra NarayanNo ratings yet
- Exceptions and Limitation of Patent Rights and Its Enforcement in IndiaDocument8 pagesExceptions and Limitation of Patent Rights and Its Enforcement in IndiaVyas NikhilNo ratings yet
- Chap 3Document40 pagesChap 3eshbliNo ratings yet
- Annual Report Final 2017-18 enDocument232 pagesAnnual Report Final 2017-18 enNidhi DesaiNo ratings yet
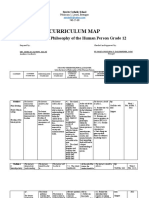
- Curriculum Map in Introduction To The World ReligionDocument7 pagesCurriculum Map in Introduction To The World ReligionRaizza Vanizza SiguenzaNo ratings yet
- Eclipse Ring Planning Guide - Any To AnyDocument8 pagesEclipse Ring Planning Guide - Any To AnyAnsar ShafiiNo ratings yet
- List of Engineering Colleges in PakistanDocument7 pagesList of Engineering Colleges in PakistanFahad Bin ImtiazNo ratings yet
- 6 Bhel - Noida ElectricalDocument9 pages6 Bhel - Noida Electricaldeepti sharmaNo ratings yet
- Sensair Manual 1.0 en PDFDocument104 pagesSensair Manual 1.0 en PDFPaul KinsellaNo ratings yet
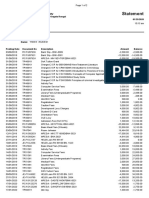
- Crystal Report Viewer 1Document2 pagesCrystal Report Viewer 1David Lemayian SalatonNo ratings yet
- Catalog of Replacement Parts: Model D300 Series MixersDocument24 pagesCatalog of Replacement Parts: Model D300 Series Mixersanto starlinNo ratings yet
- Street Rehabilitation Program ReportDocument2 pagesStreet Rehabilitation Program ReportWCPO 9 NewsNo ratings yet
- Performance Evaluation of TDL Channels For Downlink 5G MIMO SystemsDocument4 pagesPerformance Evaluation of TDL Channels For Downlink 5G MIMO SystemspruxmanNo ratings yet
- Guide Identifying Handling Low Density Asbestos Fibre BoardDocument6 pagesGuide Identifying Handling Low Density Asbestos Fibre Boardhitman1363No ratings yet