You might also like
- Green's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)From EverandGreen's Function Estimates for Lattice Schrödinger Operators and Applications. (AM-158)No ratings yet
- Analysis of Performance and Implementation Complexity of Array Processing in Anti-Jamming GNSS ReceiversDocument6 pagesAnalysis of Performance and Implementation Complexity of Array Processing in Anti-Jamming GNSS ReceiversImpala RemziNo ratings yet
- Barlett MethodDocument15 pagesBarlett Methodking khanNo ratings yet
- High Resolution TEMDocument5 pagesHigh Resolution TEMd721739No ratings yet
- SYSID2009 Saint MaloDocument6 pagesSYSID2009 Saint MaloMarcioNo ratings yet
- Remezr2 ArxivDocument30 pagesRemezr2 ArxivFlorinNo ratings yet
- Fulltext PDFDocument10 pagesFulltext PDFLovinf FlorinNo ratings yet
- 82445188Document17 pages82445188safaa.elgharbi1903No ratings yet
- A Schur-Padé Algorithm For Fractional Powers of A Matrix: Higham, Nicholas J. and Lin, Lijing 2010Document24 pagesA Schur-Padé Algorithm For Fractional Powers of A Matrix: Higham, Nicholas J. and Lin, Lijing 2010tdtv0204No ratings yet
- On Spatial Smoothing For Direction-of-Arrival Estimation of Coherent SignalsDocument6 pagesOn Spatial Smoothing For Direction-of-Arrival Estimation of Coherent SignalsMark LindseyNo ratings yet
- Non Periodic Trigonometric ApproximationDocument16 pagesNon Periodic Trigonometric ApproximationHillel Tal-EzerNo ratings yet
- Optical edge detection metasurfaceDocument6 pagesOptical edge detection metasurface廖宇轩No ratings yet
- Computing Room Acoustics With CUDA - 3D FDTD Schem PDFDocument4 pagesComputing Room Acoustics With CUDA - 3D FDTD Schem PDFLavkeshKumarNo ratings yet
- Journal of Computational and Applied Mathematics Model-Trust AlgorithmDocument11 pagesJournal of Computational and Applied Mathematics Model-Trust AlgorithmCândida MeloNo ratings yet
- Accuracy of Semi-Analytical Sensitivities and Its Improvement by The Natural MethodDocument4 pagesAccuracy of Semi-Analytical Sensitivities and Its Improvement by The Natural MethodYoyok SetyoNo ratings yet
- CT and SAR Imaging Using Fourier TechniquesDocument12 pagesCT and SAR Imaging Using Fourier TechniquesFreddy PesantezNo ratings yet
- MIRA imaging algorithm for optical interferometryDocument12 pagesMIRA imaging algorithm for optical interferometryAnonymous FGY7goNo ratings yet
- MD Calculations Notes on Classical SimulationsDocument89 pagesMD Calculations Notes on Classical SimulationsSaga AbdallaNo ratings yet
- Genetically evolved phase aggregation technique controls linear arraysDocument18 pagesGenetically evolved phase aggregation technique controls linear arrayspuja.sarkarNo ratings yet
- High Resolution Fourier Transform Spectroscopy With Phase Correction in Real TimeDocument10 pagesHigh Resolution Fourier Transform Spectroscopy With Phase Correction in Real Timeገዛኽኝ ሱፋNo ratings yet
- Self-Tuning of Kalman Filters For Digital Protection ApplicationsDocument4 pagesSelf-Tuning of Kalman Filters For Digital Protection ApplicationsFabien CallodNo ratings yet
- Comments On "Sinc Interpolation of Discrete Periodic Signals"Document9 pagesComments On "Sinc Interpolation of Discrete Periodic Signals"Artist RecordingNo ratings yet
- HPL Brims 96 04Document18 pagesHPL Brims 96 04jeannotkabNo ratings yet
- Encoding The Ball From Limited MeasurementsDocument10 pagesEncoding The Ball From Limited MeasurementsPolaniaCabreraNo ratings yet
- Data Driven Choice of Threshold in Cepstrum Based Spectrum EstimateDocument15 pagesData Driven Choice of Threshold in Cepstrum Based Spectrum EstimatesipijNo ratings yet
- Tuning The Leading Roots of A Second Order DC Servomotor With Proportional Retarded ControlDocument6 pagesTuning The Leading Roots of A Second Order DC Servomotor With Proportional Retarded ControlKOKONo ratings yet
- Adaptive Unscented Filtering Technique and Particle Swarm Optimization For Estimation of Non-Stationary Signal ParametersDocument6 pagesAdaptive Unscented Filtering Technique and Particle Swarm Optimization For Estimation of Non-Stationary Signal ParameterssarojxyzNo ratings yet
- Tools For Kalman Filter TunningDocument6 pagesTools For Kalman Filter Tunningnadamau22633No ratings yet
- Simple Equations for Calculating Multilevel Phase GratingsDocument5 pagesSimple Equations for Calculating Multilevel Phase GratingsnattuNo ratings yet
- Proceedings Letters: Section DiscontinuedDocument2 pagesProceedings Letters: Section DiscontinuedMs AghamiriNo ratings yet
- Hy Using A New Statistically Optimal (N975) Patch Near-Field Acoustical Holograp MethodDocument8 pagesHy Using A New Statistically Optimal (N975) Patch Near-Field Acoustical Holograp MethodWon-young SeoNo ratings yet
- Terebilo 1997 0182Document3 pagesTerebilo 1997 0182Particle Beam Physics LabNo ratings yet
- A Hardware Implementation of Compressive Sensing TheoryDocument10 pagesA Hardware Implementation of Compressive Sensing TheoryAlexis VelázquezNo ratings yet
- Hawes Et Al. - 2017 - Bayesian Compressive Sensing Approaches For Direction of Arrival Estimation With Mutual Coupling EffectsDocument12 pagesHawes Et Al. - 2017 - Bayesian Compressive Sensing Approaches For Direction of Arrival Estimation With Mutual Coupling EffectsJavier MelendrezNo ratings yet
- Integer Multiples of Periodic Continued FractionsDocument14 pagesInteger Multiples of Periodic Continued FractionsDenis JaissonNo ratings yet
- A Multimodal Approach For Frequency Domain Independent Component Analysis With Geometrically-Based InitializationDocument5 pagesA Multimodal Approach For Frequency Domain Independent Component Analysis With Geometrically-Based InitializationcoolhemakumarNo ratings yet
- Maximum Likelihood and CRLB EstimatorsDocument4 pagesMaximum Likelihood and CRLB EstimatorsjantuNo ratings yet
- B7_NRSC2001_Arbitrary_spherical_array_in_superresolution_direction_finding_systemsDocument8 pagesB7_NRSC2001_Arbitrary_spherical_array_in_superresolution_direction_finding_systemsDr.Hesham El-BadawyNo ratings yet
- Processing Seismic Data in The Presence of Residual StaticsDocument5 pagesProcessing Seismic Data in The Presence of Residual StaticsMithunNo ratings yet
- Uwb Isbc2010 Full PaperDocument5 pagesUwb Isbc2010 Full PaperUche ChudeNo ratings yet
- Uncertainty-driven compensation of acoustic models improves robust ASRDocument4 pagesUncertainty-driven compensation of acoustic models improves robust ASRFATHURRAHMAN HERNANDA KHASANNo ratings yet
- New seismic modelling tools in MatlabDocument45 pagesNew seismic modelling tools in MatlabUkhty Thiyyu SaiianqBundaNo ratings yet
- Advanced Multi-Pass InSAR Imaging For SurfaceDocument10 pagesAdvanced Multi-Pass InSAR Imaging For SurfaceSp LeeNo ratings yet
- Approximation of Lightning Current Waveforms Using Complex Exponential FunctionsDocument4 pagesApproximation of Lightning Current Waveforms Using Complex Exponential Functions임광식No ratings yet
- Signal: Multichannel Sampling For Multiband SignalsDocument6 pagesSignal: Multichannel Sampling For Multiband SignalsTest oneNo ratings yet
- Fukushima2012 Article NumericalComputationOfSphericalDocument15 pagesFukushima2012 Article NumericalComputationOfSphericalvyushNo ratings yet
- Notes On Spectral MethodsDocument18 pagesNotes On Spectral MethodsrosoportNo ratings yet
- Semi-Analytical Karhunen-Loeve Representation of Irregular Waves Based On The Prolate Spheroidal Wave FunctionsDocument18 pagesSemi-Analytical Karhunen-Loeve Representation of Irregular Waves Based On The Prolate Spheroidal Wave FunctionsmmrmathsiubdNo ratings yet
- Deterministic Batch ANNDocument21 pagesDeterministic Batch ANNvejifon253No ratings yet
- Ration Approximization of Time Domain PDFDocument10 pagesRation Approximization of Time Domain PDFalessio8No ratings yet
- hoversten1982Document28 pageshoversten1982picolindoNo ratings yet
- Fungsi Bessel (Asli) - M Malik KadafiDocument8 pagesFungsi Bessel (Asli) - M Malik KadafiMalik KadafiNo ratings yet
- IWAENC 2006 – Beamforming and ICA for Source SeparationDocument4 pagesIWAENC 2006 – Beamforming and ICA for Source Separationmahdi114No ratings yet
- Ensemble Kalman Filter for History MatchingDocument1 pageEnsemble Kalman Filter for History MatchingLian DuanNo ratings yet
- Kassahun Hassen - The Levinson Algorithm - SeminarDocument5 pagesKassahun Hassen - The Levinson Algorithm - SeminarHajaManNo ratings yet
- Pade ApproximationDocument6 pagesPade ApproximationSaurabh AnmadwarNo ratings yet
- A Stable Marching-on-in-Time Algorithm Capable of Handling Multiple Excitations - Application To Wire Junction ProblemsDocument3 pagesA Stable Marching-on-in-Time Algorithm Capable of Handling Multiple Excitations - Application To Wire Junction ProblemshosseinNo ratings yet
- Using Iterative Linear Regression Model To Time Series Models Zouaoui Chikr-el-Mezouar, Mohamed AttouchDocument14 pagesUsing Iterative Linear Regression Model To Time Series Models Zouaoui Chikr-el-Mezouar, Mohamed AttouchFransiscus DheniNo ratings yet
- New Variable Step Size Affine ProjectionDocument5 pagesNew Variable Step Size Affine ProjectionPetryGabryelNo ratings yet
- Generalised Monopulse Estimation and Its PerformanceDocument4 pagesGeneralised Monopulse Estimation and Its PerformanceAbel Blanco FernandezNo ratings yet
- H Generator Set Data SheetDocument4 pagesH Generator Set Data SheetChandrasekhar BabuNo ratings yet
- Perkins - 30kvaDocument6 pagesPerkins - 30kvaphredlovNo ratings yet
- Installation Guidelines PDFDocument18 pagesInstallation Guidelines PDFDemetrios GkikasNo ratings yet
- Greek Letters: Google Docs Equation Editor Unofficial Shortcuts List / Cheat SheetDocument1 pageGreek Letters: Google Docs Equation Editor Unofficial Shortcuts List / Cheat SheetphredlovNo ratings yet
- Ea y Control Relay MFD-Titan Multi-Function DisplayDocument53 pagesEa y Control Relay MFD-Titan Multi-Function Displaygoangagoanga99No ratings yet
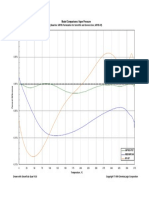
- Comparación de Modelos de Presión de VaporDocument1 pageComparación de Modelos de Presión de VaporphredlovNo ratings yet
- Acred ElectronicaDocument1 pageAcred ElectronicaphredlovNo ratings yet
- Genset - New C 250 (CPG)Document4 pagesGenset - New C 250 (CPG)phredlovNo ratings yet
- Polynomial Approximations of Thermodynamic PropertiesDocument36 pagesPolynomial Approximations of Thermodynamic PropertiesphredlovNo ratings yet
- 15 - HPL2010-EN. Transformadores PDFDocument20 pages15 - HPL2010-EN. Transformadores PDFphredlovNo ratings yet
- Style ManualDocument18 pagesStyle Manualmentally_illNo ratings yet
- 10 1109@pesc 2000 880483 PDFDocument5 pages10 1109@pesc 2000 880483 PDFphredlovNo ratings yet
- Using The Thesis and Dissertation TemplatesDocument25 pagesUsing The Thesis and Dissertation Templatesice1112No ratings yet
- Code Ecodial v4.2ESDocument1 pageCode Ecodial v4.2ESphredlovNo ratings yet
- THaigh - An Interview With Gaston Gonnet Co-Creator of MapleDocument84 pagesTHaigh - An Interview With Gaston Gonnet Co-Creator of MaplephredlovNo ratings yet
- JLeon - Diseño e Implementacion de Un Simulador de Microcomputador No ConvencionalDocument4 pagesJLeon - Diseño e Implementacion de Un Simulador de Microcomputador No ConvencionalphredlovNo ratings yet
- Cycloconverters: Fig.1 Block Diagram of A CycloconverterDocument17 pagesCycloconverters: Fig.1 Block Diagram of A Cycloconvertersagar jaiswal100% (3)
- E105 04disenoimpulsDocument8 pagesE105 04disenoimpulsphredlovNo ratings yet
- Zhang 2014Document5 pagesZhang 2014phredlovNo ratings yet
- Cycloconverters: Fig.1 Block Diagram of A CycloconverterDocument17 pagesCycloconverters: Fig.1 Block Diagram of A Cycloconvertersagar jaiswal100% (3)
- Psychometrika Vol. 5, No. 2 JUNE, 1940: (R - X) D ODocument4 pagesPsychometrika Vol. 5, No. 2 JUNE, 1940: (R - X) D OphredlovNo ratings yet
- Principal: Psychometrika - Vol. 1, No. 1Document9 pagesPrincipal: Psychometrika - Vol. 1, No. 1phredlovNo ratings yet
- History of Power Electronics Development in JapanDocument11 pagesHistory of Power Electronics Development in JapanJJGNo ratings yet
- Novel Utility Interactive Photovoltaic Inverter With Generation Control CircuitDocument5 pagesNovel Utility Interactive Photovoltaic Inverter With Generation Control CircuitphredlovNo ratings yet
- Total Energy Forecast M O D E L For Rural Distribution CooperativesDocument7 pagesTotal Energy Forecast M O D E L For Rural Distribution CooperativesphredlovNo ratings yet
- Econometric S TextDocument4 pagesEconometric S TextphredlovNo ratings yet
- FJF6WRQHOHYJXEQDocument5 pagesFJF6WRQHOHYJXEQphredlovNo ratings yet
- Dynamic Simulation of Insulin-Glucose Interaction in Type 1 Diabetes With MATLAB Simulink®Document11 pagesDynamic Simulation of Insulin-Glucose Interaction in Type 1 Diabetes With MATLAB Simulink®Jonas KristantoNo ratings yet
- Fluosilic Acid MsdsDocument5 pagesFluosilic Acid MsdsVuglaShemmanNo ratings yet
- Eating Healthily: People's Mixed ViewsDocument2 pagesEating Healthily: People's Mixed ViewsTbb GajahMada MagetanNo ratings yet
- Graphing linear functions and writing equations in standard formDocument15 pagesGraphing linear functions and writing equations in standard formnmarjonoNo ratings yet
- 1Document36 pages1Abrvalg_1No ratings yet
- 18.national Forestry Act 1984Document92 pages18.national Forestry Act 1984Sudhir A K KumarenNo ratings yet
- Amplifiers and OscillatorsDocument109 pagesAmplifiers and OscillatorsAdilNo ratings yet
- Prog 4534543Document559 pagesProg 4534543Vasile TroianNo ratings yet
- Filtro MFV 27Document2 pagesFiltro MFV 27Diana PinosNo ratings yet
- Tle Grade7 8 - CARPENTRYDocument10 pagesTle Grade7 8 - CARPENTRYdonna geroleoNo ratings yet
- Assessment AreasDocument27 pagesAssessment AreasbumblebabybiNo ratings yet
- Aryatech Brochure IndiaDocument12 pagesAryatech Brochure IndiaHari RamNo ratings yet
- MRCP EthicsDocument33 pagesMRCP EthicstaherNo ratings yet
- Jeanine Meyer - Origami As A General Education Math CourDocument4 pagesJeanine Meyer - Origami As A General Education Math CourscheeleNo ratings yet
- (Elsevier) The Influence of Circumferential Weld-Induced Imperfections On The Buckling of Silos ADocument12 pages(Elsevier) The Influence of Circumferential Weld-Induced Imperfections On The Buckling of Silos AMateo PaladinoNo ratings yet
- Site Mobilisation ManagementDocument12 pagesSite Mobilisation ManagementmizaNo ratings yet
- S6000-Operation-Manual SkyliftDocument50 pagesS6000-Operation-Manual SkyliftSetiawan Tuhu basukiNo ratings yet
- Mapsco Street GuidesDocument5 pagesMapsco Street Guidesapi-256961360No ratings yet
- Model Business Plan Mango Pineapple Banana 1 1 1Document86 pagesModel Business Plan Mango Pineapple Banana 1 1 1ebubec92% (13)
- Toaz - Info Super Coolant Af Nac PRDocument6 pagesToaz - Info Super Coolant Af Nac PRsugi yantoNo ratings yet
- GoPV 1sttraining - Tracker Design - 2nd PartDocument47 pagesGoPV 1sttraining - Tracker Design - 2nd PartLilia BurlacuNo ratings yet
- Life Without GravityDocument2 pagesLife Without GravityRomel Antonio Zorrilla RamirezNo ratings yet
- Ece-Research Work 1Document10 pagesEce-Research Work 1Peale ObiedoNo ratings yet
- Atlas of Alteration MineralsDocument7 pagesAtlas of Alteration MineralsErick Leiva PadillaNo ratings yet
- Joe Rozencwajg InterviewDocument17 pagesJoe Rozencwajg InterviewGold SunriseNo ratings yet
- Cambridge International Examinations Cambridge Ordinary LevelDocument7 pagesCambridge International Examinations Cambridge Ordinary LevelQuicksilverNo ratings yet
- Hooded Scarf Project From Warm Knits, Cool GiftsDocument4 pagesHooded Scarf Project From Warm Knits, Cool GiftsCrafterNews33% (3)
- Irrigation Project ManualDocument66 pagesIrrigation Project ManualHorace Prophetic DavisNo ratings yet
- Astm C1396 C1396M-17Document8 pagesAstm C1396 C1396M-17Stefano CamillucciNo ratings yet
- Chanda Paints: Bitumen 158 BLACKDocument1 pageChanda Paints: Bitumen 158 BLACKsureshNo ratings yet