You might also like
- Unsymmetrical FaultsDocument16 pagesUnsymmetrical FaultsBhairab BoseNo ratings yet
- CIRED2015 0448 Final PDFDocument5 pagesCIRED2015 0448 Final PDFRolando Henry Flores CamavilcaNo ratings yet
- Course PC3, Dubai Applic Ation of Prote Ctive Relayi NG To Distri Bution and Sub-Trans Missi On Syste MsDocument41 pagesCourse PC3, Dubai Applic Ation of Prote Ctive Relayi NG To Distri Bution and Sub-Trans Missi On Syste MsMahmoud Al-QudahNo ratings yet
- Ladder DiagramDocument17 pagesLadder DiagramItsMeRyanCNo ratings yet
- Jvs Manual JRD 011Document5 pagesJvs Manual JRD 011ashutosh20090% (1)
- Ground Fault LocationDocument8 pagesGround Fault Locationzbyszko201234No ratings yet
- Lowering The Limits For Earth-Fault Detection: Abstract-Current Flowing To Earth Has Only TwoDocument5 pagesLowering The Limits For Earth-Fault Detection: Abstract-Current Flowing To Earth Has Only TwoDeepak GehlotNo ratings yet
- Analysis and Application of Scott ConnectionDocument11 pagesAnalysis and Application of Scott ConnectionRam Uday MandalNo ratings yet
- Transient Stability - Relay Controlled Actions: Etap T I PDocument9 pagesTransient Stability - Relay Controlled Actions: Etap T I PSulaiman100% (1)
- Power Worked ExamplesDocument9 pagesPower Worked Examplesbilawal shakirNo ratings yet
- Sympathetic Inrush CurrentDocument6 pagesSympathetic Inrush CurrentRajitha BoppaNo ratings yet
- Mr902 Stab ResistorsDocument5 pagesMr902 Stab Resistorsraj151857No ratings yet
- Floating Neutral Impact in Power DistributionDocument9 pagesFloating Neutral Impact in Power DistributionSugeng SumarnoNo ratings yet
- Analysis of Nigerian Grid Using MATLABDocument8 pagesAnalysis of Nigerian Grid Using MATLABOgunranti RasaqNo ratings yet
- 2 - MTS Basic - Import and Export of Electrical EnergyDocument8 pages2 - MTS Basic - Import and Export of Electrical EnergyDimple KumawatNo ratings yet
- Temporary Overvoltages Following Transformer EnergizingDocument3 pagesTemporary Overvoltages Following Transformer EnergizingLuiz_F_A_ViannaNo ratings yet
- NOJA-7481-00 Application Note - Fault LocatorDocument15 pagesNOJA-7481-00 Application Note - Fault LocatorFranklin Nascimento VianaNo ratings yet
- Advance Power SystemsDocument88 pagesAdvance Power SystemsRachit KhannaNo ratings yet
- Switchgear Battery Sizing by HandDocument4 pagesSwitchgear Battery Sizing by HandNia KurniawatiNo ratings yet
- Parallel Operation of TransformersDocument10 pagesParallel Operation of TransformersMMK29100% (1)
- Site Inspection and Test Record: 1. General Data and InformationDocument5 pagesSite Inspection and Test Record: 1. General Data and InformationSohail AhmedNo ratings yet
- MiCOM P125Document3 pagesMiCOM P125Md NadeemNo ratings yet
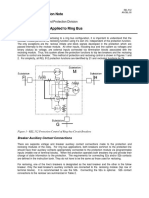
- Ring Bus Reclosing 20121217112215906Document6 pagesRing Bus Reclosing 20121217112215906Rick JordanNo ratings yet
- Note Dec 1, 2020 4 - 49 - 14 PMDocument10 pagesNote Dec 1, 2020 4 - 49 - 14 PMMahirChoudhuryNo ratings yet
- Ezct-Ezct2k Truns Ratio Testing Notes Rev 2Document12 pagesEzct-Ezct2k Truns Ratio Testing Notes Rev 2hizbi7No ratings yet
- Paralleling Module APM2000 PDFDocument4 pagesParalleling Module APM2000 PDFsareluis30No ratings yet
- Translay Commissioning Rail CorpDocument9 pagesTranslay Commissioning Rail CorpsmcraftNo ratings yet
- Buchholz Relay in Transformer - Buchholz Relay Operation and PrincipleDocument6 pagesBuchholz Relay in Transformer - Buchholz Relay Operation and PrincipleNeelakandan MasilamaniNo ratings yet
- Tap Changer IonDocument6 pagesTap Changer IonS ManoharNo ratings yet
- 6837X 12bDocument42 pages6837X 12bJorge A. Perez YebraNo ratings yet
- Xmer TestingDocument91 pagesXmer TestingSush SonkNo ratings yet
- Restricted Earth Fault Protection of Transformer - REF Protection - Electrical4UDocument11 pagesRestricted Earth Fault Protection of Transformer - REF Protection - Electrical4UBasabRajNo ratings yet
- 0517 Motor Protection Ge Grid May17Document35 pages0517 Motor Protection Ge Grid May17pothirajNo ratings yet
- Measurement of Line Impedances and Mutual Coupling of Parallel LinesDocument8 pagesMeasurement of Line Impedances and Mutual Coupling of Parallel LinesKhandai SeenananNo ratings yet
- ProtectionDocument157 pagesProtectionsivaepeNo ratings yet
- Travelling Wave Fault Location in HV LinesDocument8 pagesTravelling Wave Fault Location in HV LinesSuginoMarwotoNo ratings yet
- Induction Disc & Time-Overcurrent RelaysDocument30 pagesInduction Disc & Time-Overcurrent Relayssherif ahmed moussaNo ratings yet
- (Elearnica - Ir) - Ground Distance Relay Compensation Based On Fault Resistance CADocument6 pages(Elearnica - Ir) - Ground Distance Relay Compensation Based On Fault Resistance CAAnonymous 9VcxlFErfNo ratings yet
- Tertiary Winding of TransformerDocument3 pagesTertiary Winding of TransformerHamayoun MurtazaNo ratings yet
- EE35T - Transformer Differential ProtectionDocument4 pagesEE35T - Transformer Differential ProtectionTanveer Ul HaqNo ratings yet
- Ag2015-20 20150511Document10 pagesAg2015-20 20150511sikander843562No ratings yet
- 1MRK508019-BEN A en Fuse Supervisory Relays RXBA 4 RXETB 1 PDFDocument6 pages1MRK508019-BEN A en Fuse Supervisory Relays RXBA 4 RXETB 1 PDFUmanshu PandeyNo ratings yet
- Questions On Parallel Operation of TransformersDocument26 pagesQuestions On Parallel Operation of Transformerskibrom atsbhaNo ratings yet
- Earth Fault RelayDocument1 pageEarth Fault RelayAliu AlaoNo ratings yet
- Short-Circuit Current CalculationDocument38 pagesShort-Circuit Current CalculationElectro Tractrix100% (1)
- Problems of Circuit InterruptionDocument20 pagesProblems of Circuit Interruptioneeng812450% (2)
- Exercise - Setting An SEL-751A To Replace An Existing Electromechanical RelayDocument8 pagesExercise - Setting An SEL-751A To Replace An Existing Electromechanical RelayDavidNo ratings yet
- Summation of Alternating CurrentsDocument3 pagesSummation of Alternating Currentsalexns84No ratings yet
- Current Transformer - Electrical Notes & ArticlesDocument35 pagesCurrent Transformer - Electrical Notes & ArticlesBlake100% (1)
- My NotesDocument87 pagesMy NotesjaimanNo ratings yet
- Current TransformersDocument7 pagesCurrent Transformersmn_sundaraamNo ratings yet
- CT Saturation from DC Offset CurrentDocument20 pagesCT Saturation from DC Offset CurrentAngga Wira PramanaNo ratings yet
- Rja-Phasor Diagrams IiDocument20 pagesRja-Phasor Diagrams IiZaks MoreNo ratings yet
- Improve Power Factor by Capacitive VAR CompensationDocument15 pagesImprove Power Factor by Capacitive VAR CompensationMalith DeemanthaNo ratings yet
- Busbar ProtectionDocument10 pagesBusbar ProtectionMohd Taufiq IshakNo ratings yet
- The Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsFrom EverandThe Technology of Instrument Transformers: Current and Voltage Measurement and Insulation SystemsNo ratings yet
- Investigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsFrom EverandInvestigation of the Usefulness of the PowerWorld Simulator Program: Developed by "Glover, Overbye & Sarma" in the Solution of Power System ProblemsNo ratings yet
- DC Breaking Capacity 3VA1Document2 pagesDC Breaking Capacity 3VA1Bolivar MartinezNo ratings yet
- The Case Study of On-Line PD Measurement On In-Service MV Cable TerminationsDocument6 pagesThe Case Study of On-Line PD Measurement On In-Service MV Cable TerminationsBolivar MartinezNo ratings yet
- Product Data Sheet: C120H - Circuit Breaker - 4P - 100A - B CurveDocument2 pagesProduct Data Sheet: C120H - Circuit Breaker - 4P - 100A - B CurveBolivar MartinezNo ratings yet
- MERSEN - Ferraz MV DIN Fuse Range - Striker MechanismDocument20 pagesMERSEN - Ferraz MV DIN Fuse Range - Striker MechanismBolivar MartinezNo ratings yet
- Exp LG 667653 - 0Document1 pageExp LG 667653 - 0Francisco FerminNo ratings yet
- The Application of On-Line PDM On In-Service MV Cable TerminationsDocument4 pagesThe Application of On-Line PDM On In-Service MV Cable TerminationsBolivar MartinezNo ratings yet
- MERLIN-GERIN-33595-NT-Portable-Relay-Test-Kit - Manual HireDocument128 pagesMERLIN-GERIN-33595-NT-Portable-Relay-Test-Kit - Manual HireBolivar MartinezNo ratings yet
- 87L Application On Long Transmission Line With Series Capacitor Banks and Shunt ReactorsDocument37 pages87L Application On Long Transmission Line With Series Capacitor Banks and Shunt ReactorsBolivar MartinezNo ratings yet
- Cooper Bussmann HV FusesDocument72 pagesCooper Bussmann HV Fusesrvim0002No ratings yet
- Cable Ampacity Calculations: A Comparison of MethodsDocument7 pagesCable Ampacity Calculations: A Comparison of MethodsBolivar MartinezNo ratings yet
- Bussmann - Fuse Links DinDocument14 pagesBussmann - Fuse Links DinBolivar MartinezNo ratings yet
- Fusibles MTDocument12 pagesFusibles MTBolivar MartinezNo ratings yet
- Generator Protection - Doble EngineeringDocument214 pagesGenerator Protection - Doble EngineeringBolivar Martinez100% (5)
- Application Line Relays Dual Breaker TerminalsDocument13 pagesApplication Line Relays Dual Breaker TerminalsBolivar MartinezNo ratings yet
- Short Circuit CalculationDocument42 pagesShort Circuit Calculationgraduadoesime100% (17)
- Nfpa79 0518 en Friedrich Luetze GMBHDocument16 pagesNfpa79 0518 en Friedrich Luetze GMBHrichard heraldNo ratings yet
- Abb EtuDocument40 pagesAbb Etukamal_khan85100% (1)
- Abb EtuDocument40 pagesAbb Etukamal_khan85100% (1)
- 9AKK107319 EN 05-2018 - 20848 - ABB - Technical - Note - IEC - 60034 - 30 - 1Document2 pages9AKK107319 EN 05-2018 - 20848 - ABB - Technical - Note - IEC - 60034 - 30 - 1Guha ArnabNo ratings yet
- Protection from Short-circuit with High Voltage Fuse-LinkDocument30 pagesProtection from Short-circuit with High Voltage Fuse-LinkAmir KeikavoosnejadNo ratings yet
- ANSI MV CB Ratings and K FactorDocument8 pagesANSI MV CB Ratings and K FactorkcirrenwodNo ratings yet
- GE Motors Catalog - Section 2 - X$D Ultra® NEMA Premium® Extra PDFDocument44 pagesGE Motors Catalog - Section 2 - X$D Ultra® NEMA Premium® Extra PDFBolivar MartinezNo ratings yet
- EF370-380 Electronic Overload Relay: General InformationDocument4 pagesEF370-380 Electronic Overload Relay: General InformationBolivar MartinezNo ratings yet
- BRITISH STANDARD FOR OIL CIRCUIT BREAKERSDocument12 pagesBRITISH STANDARD FOR OIL CIRCUIT BREAKERSBolivar MartinezNo ratings yet
- Hyundai U-ACB NewDocument108 pagesHyundai U-ACB NewAlexander Wijesooriya100% (3)
- ABB Arrancador SuaveDocument3 pagesABB Arrancador SuaveBolivar MartinezNo ratings yet
- Troubleshooting Induction MotorsDocument14 pagesTroubleshooting Induction MotorsImelda LadrilloNo ratings yet
- 1SDA081063R1 t5n 630 Ekip e Lsig in 630a 3p F FDocument3 pages1SDA081063R1 t5n 630 Ekip e Lsig in 630a 3p F FBolivar MartinezNo ratings yet
- 1SDA054325R1 t5n 400 pr221ds Ls I in 400 4p F FDocument3 pages1SDA054325R1 t5n 400 pr221ds Ls I in 400 4p F FBolivar MartinezNo ratings yet
- Unit-1 PROTECTIVE RELAYING (Switchgear and Protection)Document76 pagesUnit-1 PROTECTIVE RELAYING (Switchgear and Protection)sujithNo ratings yet
- S2 ECE SyllabusDocument58 pagesS2 ECE Syllabuslakshmivs23No ratings yet
- Jiles Parameters For B-H CurvesDocument729 pagesJiles Parameters For B-H CurvesReza J.HamidiNo ratings yet
- Cad Lab ManualDocument1 pageCad Lab ManualRAM SINGHNo ratings yet
- CHEM 2101 Lecture 1 (Atomic Structure)Document4 pagesCHEM 2101 Lecture 1 (Atomic Structure)Asif UddinNo ratings yet
- High CMR Isolation Amplifiers: HCPL-7800 HCPL-7800A HCPL-7800BDocument17 pagesHigh CMR Isolation Amplifiers: HCPL-7800 HCPL-7800A HCPL-7800BRobert AguilarNo ratings yet
- Capacitive Reactance Experiment Lab 7Document7 pagesCapacitive Reactance Experiment Lab 7قويه TasmanNo ratings yet
- Altivar Machine ATV340 - ATV340U15N4Document17 pagesAltivar Machine ATV340 - ATV340U15N4PhaniNo ratings yet
- Antenna Tilt GuidelinesDocument24 pagesAntenna Tilt GuidelinesJorge Romeo Gaitan Rivera100% (5)
- Yuema CHCDocument36 pagesYuema CHCyan.yanismanNo ratings yet
- CH-303.361.371 PresentationDocument16 pagesCH-303.361.371 PresentationNasir AhmedNo ratings yet
- One Page Testing ServicesDocument1 pageOne Page Testing ServicesHaiyan ShaikhNo ratings yet
- Planar Omnidirectional Antenna Achieves >5dBi GainDocument8 pagesPlanar Omnidirectional Antenna Achieves >5dBi GainIván José Campos MadridNo ratings yet
- Sanyo Air Conditioner ManualDocument85 pagesSanyo Air Conditioner ManualrjjmejNo ratings yet
- Ratio of SI Unit Magnitude of Quantity Symbol Equation SI Unit Symbol CGS Unit SI To Cgs UnitDocument2 pagesRatio of SI Unit Magnitude of Quantity Symbol Equation SI Unit Symbol CGS Unit SI To Cgs UnitJYOTIRANJAN SAHOONo ratings yet
- Discoveries of scientists who contributed to electromagnetismDocument2 pagesDiscoveries of scientists who contributed to electromagnetismJetro RosalesNo ratings yet
- Basic Principles of Eddy Current InspectionDocument16 pagesBasic Principles of Eddy Current InspectionSiphesihle NkosiNo ratings yet
- Schneider - Electric LXM32MD30M2 DatasheetDocument3 pagesSchneider - Electric LXM32MD30M2 DatasheetBrentildaNo ratings yet
- Udayagiri, SPSR Nellore Dist. (A.P) - 524 226: Title of The Subject: Comprehensive Viva-Voce-IIIDocument12 pagesUdayagiri, SPSR Nellore Dist. (A.P) - 524 226: Title of The Subject: Comprehensive Viva-Voce-IIIsiddam maheshNo ratings yet
- Barker 2020 Physics Trials & SolutionsDocument59 pagesBarker 2020 Physics Trials & SolutionsNhan LeNo ratings yet
- Dispersion of Light by PrismsDocument3 pagesDispersion of Light by Prismspedjamt-1No ratings yet
- BS 6072 1981Document37 pagesBS 6072 1981Adura OgunnuNo ratings yet
- DCS43PA05F10Document2 pagesDCS43PA05F10culeros1No ratings yet
- Chapter 36 Series and Parallel Networks: EXERCISE 169, Page 377Document11 pagesChapter 36 Series and Parallel Networks: EXERCISE 169, Page 377DanialNo ratings yet
- Physics: OxfordDocument224 pagesPhysics: OxfordMusic Life100% (1)
- Ias 1999 801662Document8 pagesIas 1999 801662aasfklNo ratings yet
- Siemens Basics of AC DrivesDocument116 pagesSiemens Basics of AC DrivesSleman ShackoorNo ratings yet
- Principle of XPS: Surface Analysis Using X-Ray Photoelectron SpectroscopyDocument4 pagesPrinciple of XPS: Surface Analysis Using X-Ray Photoelectron Spectroscopyonynho100% (1)
- Unit 5Document26 pagesUnit 5Dr C.R. BalamuruganNo ratings yet
- Answer 11 C Structure of Atom - Full TestDocument6 pagesAnswer 11 C Structure of Atom - Full TestVyjayanthi Jeevan Prakash 10No ratings yet